|
|
DriveWorks SDK Reference| 0.6.67 Release |
|
|
DriveWorks SDK Reference| 0.6.67 Release |
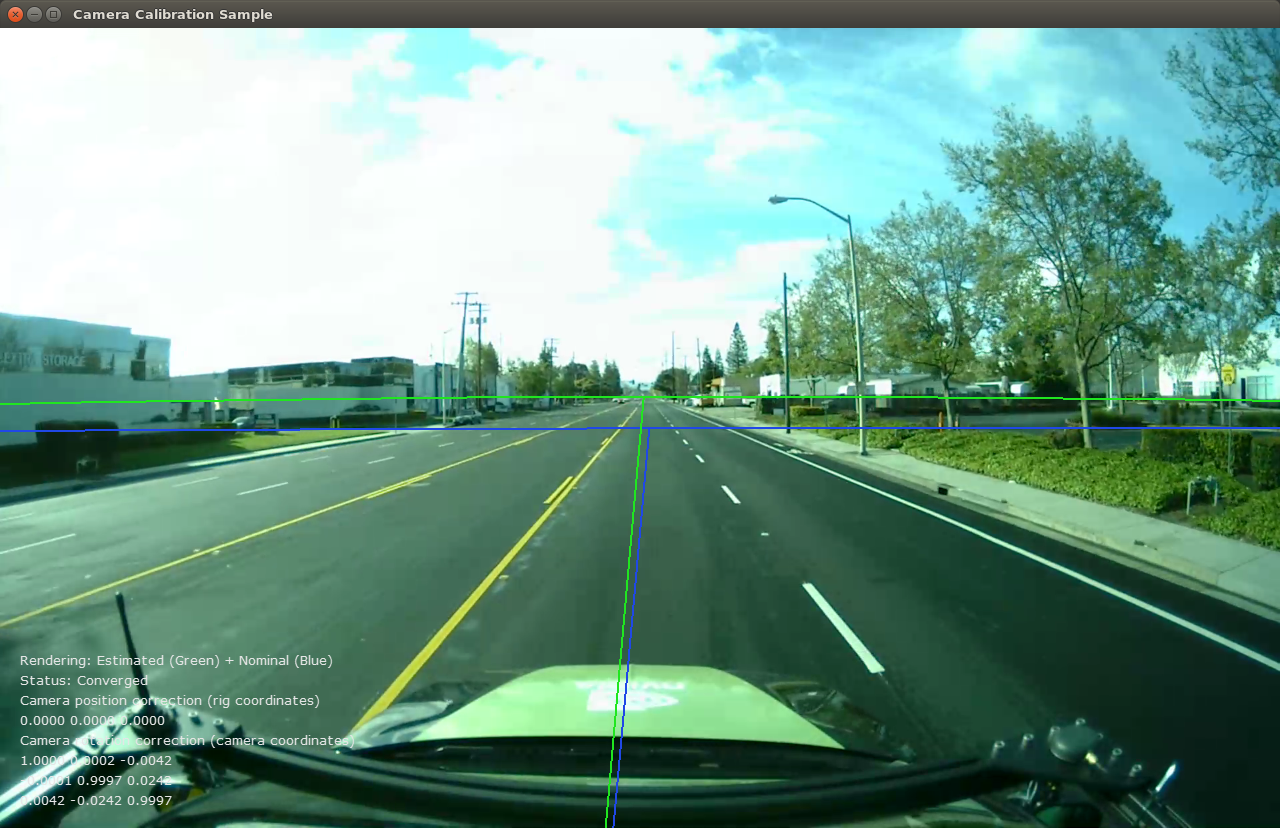
This sample demonstrates the ability to estimate camera extrinsics using the DriveWorks Calibration Engine.
The default usage is ./sample_calibration_camera, and the sample reads predefined sample data.
Options are:
--path={sample_path} The base path to offline data
--rig=rig.xml The name of the rig configuration file
--sensorIndex=0 The index of the camera in the rig configuration file
--video=video_0_roof_front_120.h264 The name of the video file
--video-time=video_time_0.txt The name of the video time file
--can=can_vehicle.bin The name of the CAN file
--imu=imu_xsens.bin The name of the imu file
--dbc={(sample_path}can.dbc The name of the CAN dbc file
--dbc-speed=Steering_Report.SPEED The field name for speed in the CAN data
--dbc-steeringSteering_Report.ANGLE The field name for angle in the CAN data
--lanenet-threshold=0.3 The threshold for lanenet
The sample creates a window, displays a video, and displays nominal calibration indicators (blue) and after convergence a corrected calibration indicators (green). Indicators are showing the estimated rig horizon + forward directions, as seen in the camera's frame.