|
|
DriveWorks SDK Reference| 0.6.67 Release |
|
|
DriveWorks SDK Reference| 0.6.67 Release |
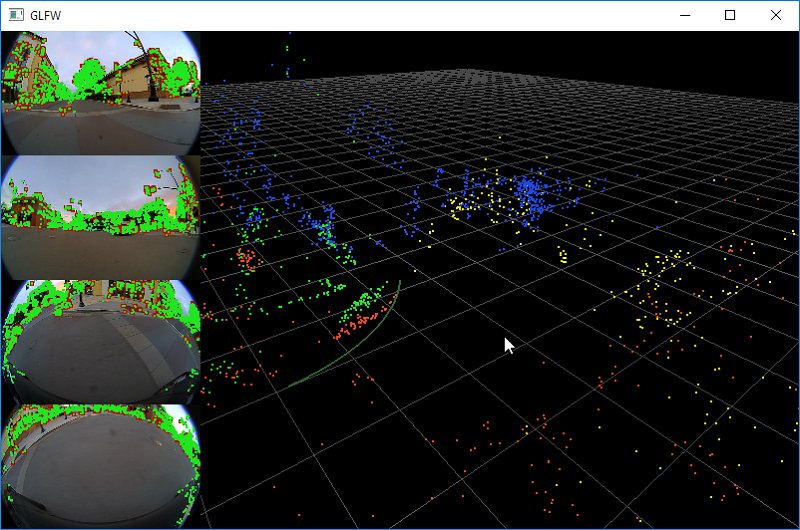
The Structure from Motion sample demonstrates the triangulation functionality of the SFM module; a car pose is estimated entirely from CAN data using the NVIDIA® DriveWorks egomotion module. The car has a 4-fisheye camera rig that is pre-calibrated. Features are detected and tracked using the features module. Points are triangulated for each frame by using the estimated pose and tracked features.
The command line for the sample is:
./sample_sfm --video0=<video file.h264> --video1=<video file.h264>
--video2=<video file.h264> --video3=<video file.h264>
--rig=<rig.xml>
--can=<canbus.can>
--videoTimestamps=<timestamps.txt>
rig.xml file is in the format produced by the DriveWorks calibration tool.If a mouse is available, the left button rotates the 3D view, the right button translate, and the mouse wheel zooms.
While the sample is running the following commands are available:
The left side of the screen shows the 4 input images; tracked features are shown in green. Triangulated points are reprojected back onto the camera and shown in red. The right side shows a 3D view of the triangulated point cloud.
In 3D, the colors are: