Table of Contents
- Note
- SW Release Applicability: This sample is available in both NVIDIA DriveWorks and NVIDIA DRIVE Software releases.
Description
The Dense Optical Flow module sample demonstrates the Dense Optical Flow pipeline on multiple hardware units:
- VIC (Video Image Compositor).
- NVIDIA NVENC (NVIDIA Video Encoder).
- PVA (Programmable Vision Accelerator).
The Dense Optical Flow sample accepts RAW videos, h264 videos, or live camera input data from an AR0231 (revision >= 4) sensor. It then applies an optical flow algorithm to estimate motion vectors between frames.
Running the Sample
The DenseOpticalFlow sample, sample_denseopticalflow, accepts the following optional parameters. If none are specified, it performs detections on a supplied pre-recorded video.
./sample_denseopticalflow --input-type=[video|camera]
--video=[path/to/video]
--camera-type=[camera]
--camera-group=[a|b|c|d]
--camera-index=[0|1|2|3]
--slave=[0|1]
--estimationMode=[UHP|HP|HQ]
--nvencNo=[0|1]
--pvaNo=[0|1]
Where:
--input-type=[video|camera]
Defines if the input is from live camera or from a recorded video.
Live camera is supported only on NVIDIA DRIVE(tm) platforms.
It is not supported on Linux (x86 architecture) host systems.
Default value: video
--video=[path/to/video]
Specifies the absolute or relative path of a raw, lraw or h264 recording.
Only applicable if --input-type=video
Default value: path/to/data/samples/stereo/left_1.h264
--camera-type=[camera]
Specifies a supported AR0231 `RCCB` sensor.
Only applicable if --input-type=camera.
Default value: ar0231-rccb-bae-sf3324
--camera-group=[a|b|c]
Is the group where the camera is connected to.
Only applicable if --input-type=camera.
Default value: a
--camera-index=[0|1|2|3]
Indicates the camera index on the given port.
Default value: 0
--slave=[0|1]
Setting this parameter to 1 when running the sample on Xavier B accesses the camera
on Xavier A.
Applicable only when --input-type=camera.
Default value: 0
--estimationMode=[UHP|HP|HQ]
Indicates the quality and the performance of Dense Optical Flow algorithm:
- HP: High Performance
- UHP: Ultra High Performance
- HQ: High Quality
Default value: HP
--nvencNo=[0|1]
Indicates on which Nvidia Video Encoder the corresponding stage of the pipeline is to be executed.
Default value: 0
--pvaNo=[0|1]
Indicates on which PVA engine the corresponding stage of the pipeline is to be executed.
Default value: 0
Examples
To run the sample on a video
./sample_denseopticalflow --input-type=video --video=<video file>
To run the sample on a camera on NVIDIA DRIVE platforms
./sample_dense_opticalflow --input-type=camera --camera-type=<camera type> --camera-group=<camera group> --camera-index=<camera idx on camera group>
To run the sample on non-default engines
./sample_denseopticalflow --nvencNo=1 --pvaNo=1
Output
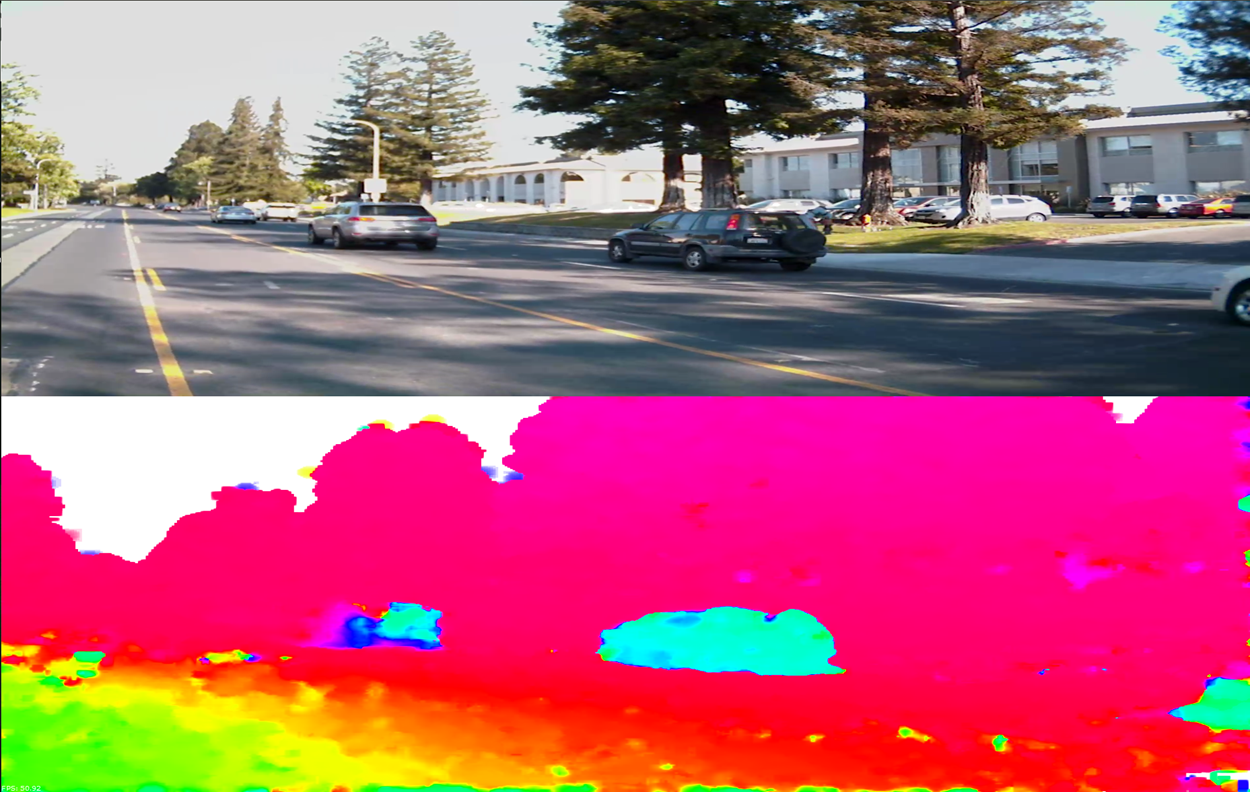
The sample creates a window and displays a video with two sections. The section above demonstrates the original video, whereas the section below shows the result of Dense Optical Flow with color coding presented at https://hci.iwr.uni-heidelberg.de/Correspondence_Visualization/.
Additional information
For more information, see Dense Optical Flow.