- Note
- SW Release Applicability: This tutorial is applicable to modules in NVIDIA DRIVE Software releases.
A Lane Plan is described by the dwLanePlan struct:
To access the dwLanePlan struct, call:
The dwLanePlan struct is a list of Lane Plan Segments. Each Lane Plan Segment has a list of Lane Plan Lanes that describe the current lane change situation at that segment:
A Lane Plan Lane is a polyline, together with pointers to the original dwMapsLane for each point:
If the segment has only one Lane Plan Lane, then that lane must be followed. If there is more than one lane, the last lane of the list is the target lane that must be reached to follow the Lane Plan.
Each point on a Lane Plan can be accessed through dwLanePlanIndex:
dwLanePlanIndex provides a reference into the Lane Plan defined by the segment index, the lane index on the segment, and the point index on the lane.
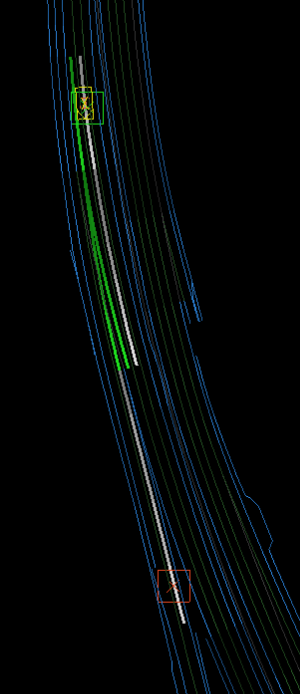
The example image below shows a small Lane Plan with three segments. The first segment has two Lane Plan Lanes, the second segment has three Lane Plan Lanes due to a lane split at the end of the target lane of the first segment. The third segment shows the lane that must be followed to reach the target point (indicated by the red box). So, the first two segments describe where and how many lane changes must be executed to reach the target.