1 # Copyright (c) 2019-2020 NVIDIA CORPORATION. All rights reserved.
3 @page localization_mainsection Localization
5 @note SW Release Applicability: This module is available in **NVIDIA DRIVE Software** releases.
9 The Localization module determines the precise 6-DOF position and orientation of a vehicle within an HD map. NVIDIA uses
10 landmark localization to refine and improve the estimated vehicle pose from @ref egomotion_mainsection; landmark localization
11 involves comparing real-time landmark detections (such as lane lines, road boundaries, road signs, or poles) with their
12 counterparts in an HD map to determine an exact pose.
13 Highly accurate placement is necessary for tasks such as path planning and maneuvering using HD map data.
15 The Localization module takes three types of measurements as input. First, the module requires an approximate, absolute vehicle position
16 in WGS84 and orientation w.r.t. ENU at that position. Second, the module needs a relative transformation from
17 the vehicle at the previous time of calling the module to the current time.
18 Third and finally, the module needs detected landmarks. Localization is intended to improve the
19 output of the @ref egomotion_mainsection module: the absolute and relative position and orientation data should
20 come from egomotion. Landmark detections can be computed with the @ref landmarks_mainsection and
21 the @ref object_mainsection modules. The localization module maintains an internal history of localized poses and detection matching,
22 and requires that each call be at a monotonically increasing time. Localization results
23 are more accurate after a "burn in" phase of about 50 calls to the module.
25 The output of the Localization module consists of three distinct parts. First, the module outputs an absolute position in
26 WGS84 and orientation w.r.t. ENU at the position. Next, the output specifies the relative pose to the closest road segment in the HD map.
27 This section consists of a 3 element ID specifying the closest road segment, the relative pose w.r.t. an ENU coordinate frame about
28 the origin of the closest road segment (refer to @ref maps_mainsection for more information on road segments), and a flag
29 indicating whether the relative pose is valid. Lastly, the output provides a measure of uncertainty for the position and orientation.
31 @note Localization performs undistortion of the input lane detections based on an FTheta camera model that is provided at initialization time.
33 The following figure depicts HD map components projected into the camera field of view after localization (left), as well
34 as the vehicle rig position rendered inside the HD map after localization (right).
36 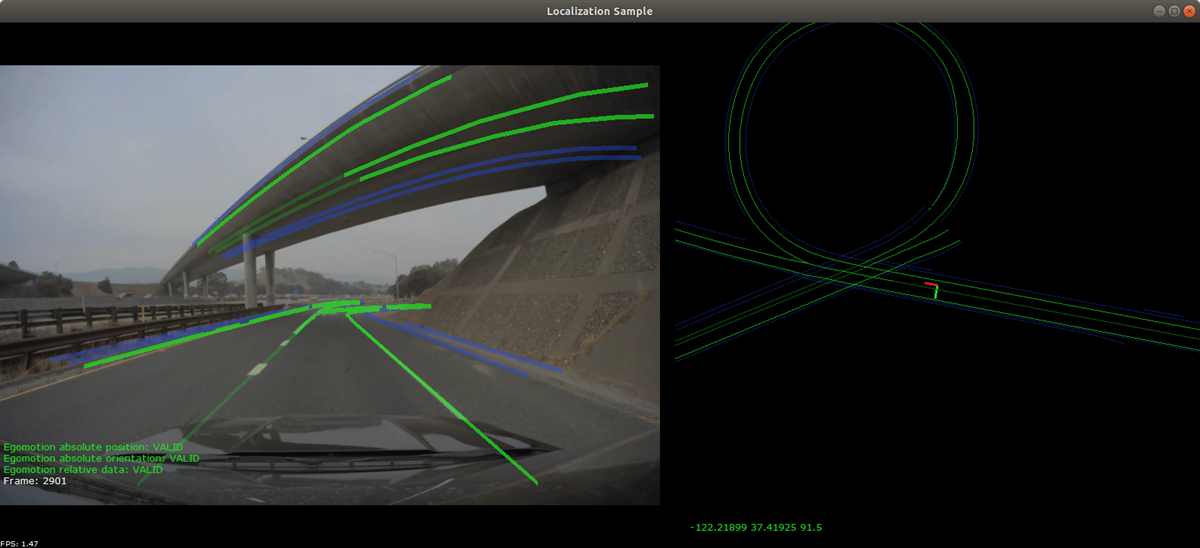
40 - @ref localization_usecase1
44 - @ref localization_group