Table of Contents
- Note
- SW Release Applicability: This tutorial is applicable to modules in NVIDIA DRIVE Software releases.
Initialization
To initialize the Safety Force Field default parameters
An actor's claimed set is the likely trajectory in space-time of the actor executing its safety procedure. For example, the green set in the following figure is a claimed set if the safety procedure is driving straight and braking:
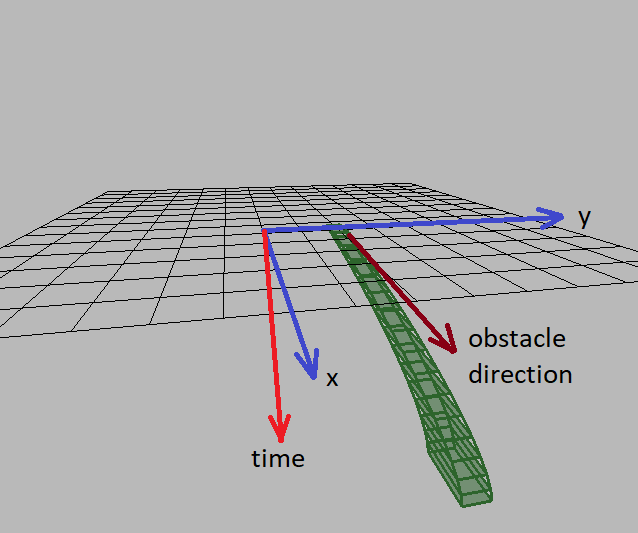
The underlying space of the green claimed set is space-time where the space is the xy-plane. Its projection on xy-plane is a long rectangle, showing the obstacle is moving along a fixed direction. Its projection on the plane spanned by the obstacle direction and time axis is a parabola opening downwards. This indicates the obstacle is slowing down over time.
The following attributes for the dwSafetyForceFieldParams struct configure the shape for each actor's claimed set:
forceStraight.useRoadStructure.expandClaimedSets.
The default value for these attributes is false, so the default claimed set comes from holding the steering wheel and braking.
The following figures are examples of claimed sets when each of these attributes are enabled:
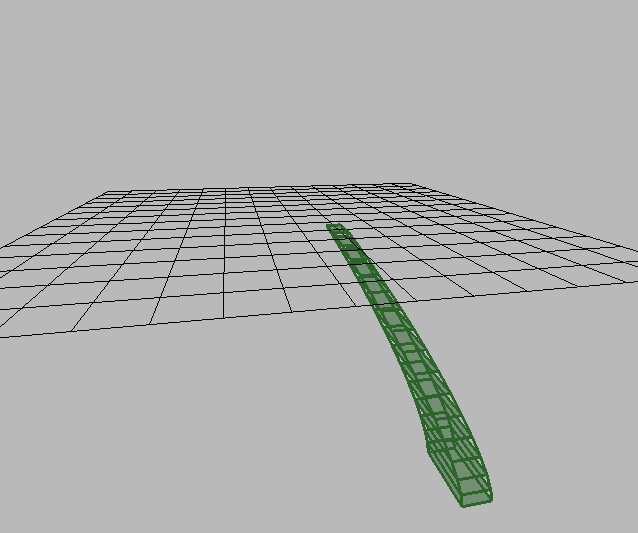
forceStraight = true, and other attributes are default. The claimed set is continued straight in the actor's current heading throughout the safety procedure.
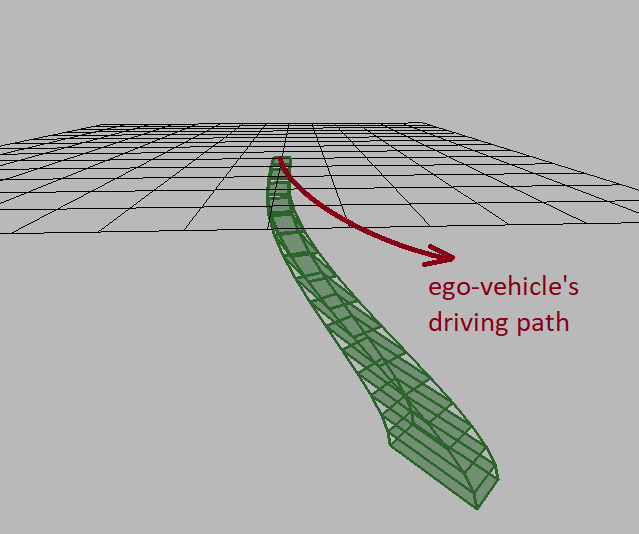
useRoadStructure = true, and other attributes are default. The claimed sets align with the ego-vehicle's current path.
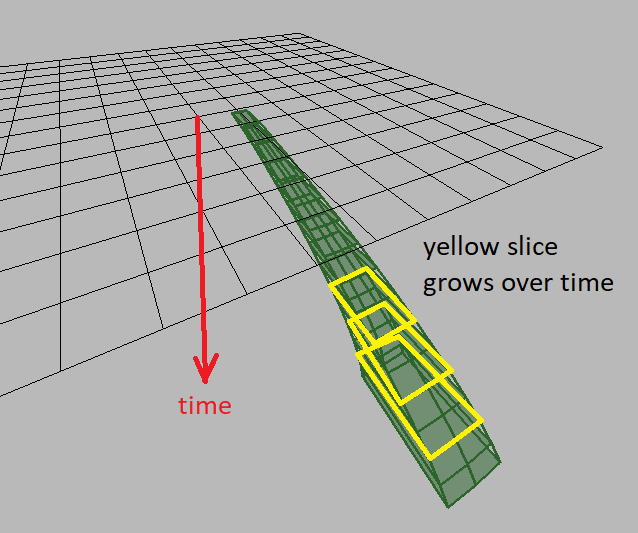
expandClaimedSets = true, and other attributes are default. The claimed sets expand laterally and longitudinally to take account of control uncertainties and reaction time. In the following figure, the quadrilateral time slices of the green claimed set grow over time.
About combining the attributes, you can set useRoadStructure = true and expandClaimedSets = true together. However, the setting forceStraight = true ignores what useRoadStructure and expandClaimedSets are set, so that road structure is not used and claimed sets are not expanded.
To initialize a pointer to a Safety Force Field handle
Binding Inputs
The inputs for a Safety Force Field module must be bound before you run the process function. These include obstacles, egomotion, the vehicleIO state, and a lane graph.
To bind an objects pointer
The Safety Force Field module consumes obstacles on the ground within 120 meters of the ego-vehicle. The maxNumActors attribute for the dwSafetyForceFieldParams struct determines the upper bound of the number of these obstacles to be processed.
The egomotion and vehicleIO state decide the ego-vehicle's state (including speed and front wheel steering angle). This is used as input to generate the ego-vehicle's claimed set.
To bind an egomotion handle
To bind the vehicleIO state
To bind a lane graph pointer
Process Function
The process function computes the claimed set for each actor, checks for collisions between the ego-vehicle and an actor, and computes a Safety Force Field for each collision point.
Each Safety Force Field generates one control constraint.
To obtain the control constraints from a Safety Force Field module for actuation
Release
To release a Safety Force Field module
For a more detailed workflow, please refer to the Safety Force Field Sample.