Egomotion Sample
Table of Contents
- Note
- SW Release Applicability: This sample is available in both NVIDIA DriveWorks and NVIDIA DRIVE Software releases.
Description
The Egomotion sample application shows how to use steering angle and velocity CAN measurements. It also explains how to use IMU and GPS measurements to compute vehicle position and orientation within the world coordinate system.
Running the Sample
The command line for the sample is:
./sample_egomotion --camera-sensor-name=[name]
--vehicle-sensor-name=[name]
--imu-sensor-name=[name]
--gps-sensor-name=[name]
--mode=[0|1]
--output=[path/to/output/file]
--outputkml=[path/to/output/file]
--rig=[path/to/rig/file]
--use-rear-wheel=[0|1]
--enable-suspension=[0|1]
where
--camera-sensor-name=[name]
Name of the camera sensor in the given rig file.
Default value: First camera sensor found in the rig file.
--vehicle-sensor-name=[name]
Name of the vehicle sensor in the given rig file.
Default value: First vehicle sensor found in the rig file.
--gps-sensor-name=[name]
Name of the GPS sensor in the given rig file.
Default value: First GPS sensor found in the rig file.
--imu-sensor-name=[name]
Name of the IMU sensor in the given rig file.
Default value: First IMU sensor found in the rig file.
--mode=[0|1]
The sample application supports different egomotion estimation modes.
To switch the mode, pass `--mode=0/1` as the argument.
Mode 0 represents odometry-based egomotion estimation.
The vehicle motion is estimated using Ackerman principle.
Mode 1 uses IMU measurements to estimate vehicle motion.
Gyroscope and linear accelerometers are filtered and fused to estimate vehicle orientation.
Using speed vehicle odometry reading, the vehicle's traveling path can be estimated.
This mode also filters GPS locations if they are passed to the module.
Default value: 1
--output=[path/to/output/file]
If specified, the sample application outputs the odometry data to this file. The vehicle's position
in world coordinates (x,y) together with a timestamp in microseconds will be written out as:
....
5680571648,-7.67,118.30
5680604981,-7.75,118.33
5680638314,-7.83,118.36
5680671647,-7.91,118.38
5680704980,-7.98,118.41
Default value: none
--outputkml=[path/to/output/file]
If specified, the sample application outputs the GPS and estimated location.
Default value: none
--rig=[path/to/rig/file]
Rig file containing all information about vehicle sensors and calibration.
Default value: path/to/data/samples/recordings/suburb0/rig.json
--use-rear-wheel=[0|1]
Specifies if rear wheel speed should be used as speed measurement. For this to work
`dwVehicleIOState` must provide wheel speed measurements.
Default value: 1
--enable-suspension=[0|1]
Enables egomotion suspension modeling. It requires Odometry+IMU [--mode=1].
Default value: 0
You must provide the following file:
- CAN file: contains the CAN messages with the speed and steering angle.
Examples
Running the sample with default arguments
./sample_egomotion
Running the sample with output file
sudo ./sample_egomotion --output=/home/nvidia/out.txt
Output
The sample application creates a window, displays a video, and plots the vehicle's position at a 30 Hertz sampling rate. Current speed, roll, pitch, and yaw are also printed.
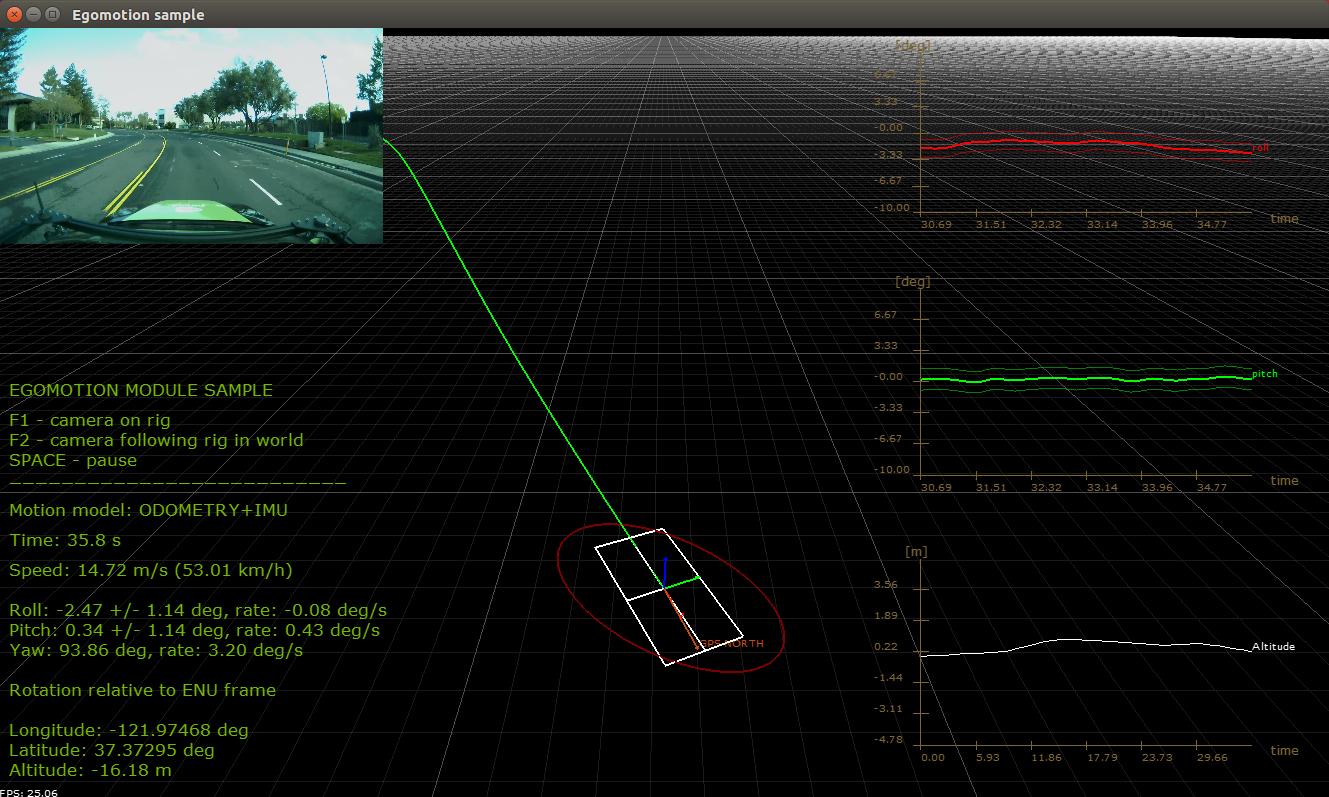
Egomotion Sample
Additional Information
For more details see Egomotion.