Table of Contents
- Note
- SW Release Applicability: This sample is available in NVIDIA DRIVE Software releases.
Description
The Safety Force Field sample checks whether a desired control (i.e., a choice of steering angle and longitudinal acceleration) is safe when all actors (ego-vehicle and other obstacles) execute a safety procedure. Safety is with respect to the obstacles in a given obstacle array, or egomotion/vehicleIO state. If the control is deemed unsafe, it is corrected to a safe one.
In this sample, only the ego-vehicle executes a corrected control. Other vehicles do not apply any control correction. A lane graph can optionally be specified and will make the safety procedure line up parallel to the given lane.
Running the Sample
The command line for the sample is:
./sample_safetyforcefield --testcase=[0|1]
--useRoadStructure=[0|1]
--expandClaimedSets=[0|1]
where
--testcase=[0|1]
Specifies a predefined synthetic scenario.
Scenario 0 has an ego-vehicle with two other vehicles that are cutting in the ego-vehicle's driving direction.
Scenario 1 has an ego-vehicle following another slow vehicle.
Default value: 0
--useRoadStructure=[0|1]
1 for safety procedure to line up with a road
Default value: 0
--expandClaimedSets=[0|1]
1 for claimed sets to expand by possible reaction time uncertainty
Default value: 0
Examples
Running the sample with default arguments
./sample_safetyforcefield
Running the sample using a expanding claimed set that lines up with the road structure
./sample_safetyforcefield --useRoadStructure=1 --expandClaimedSets=1
Output
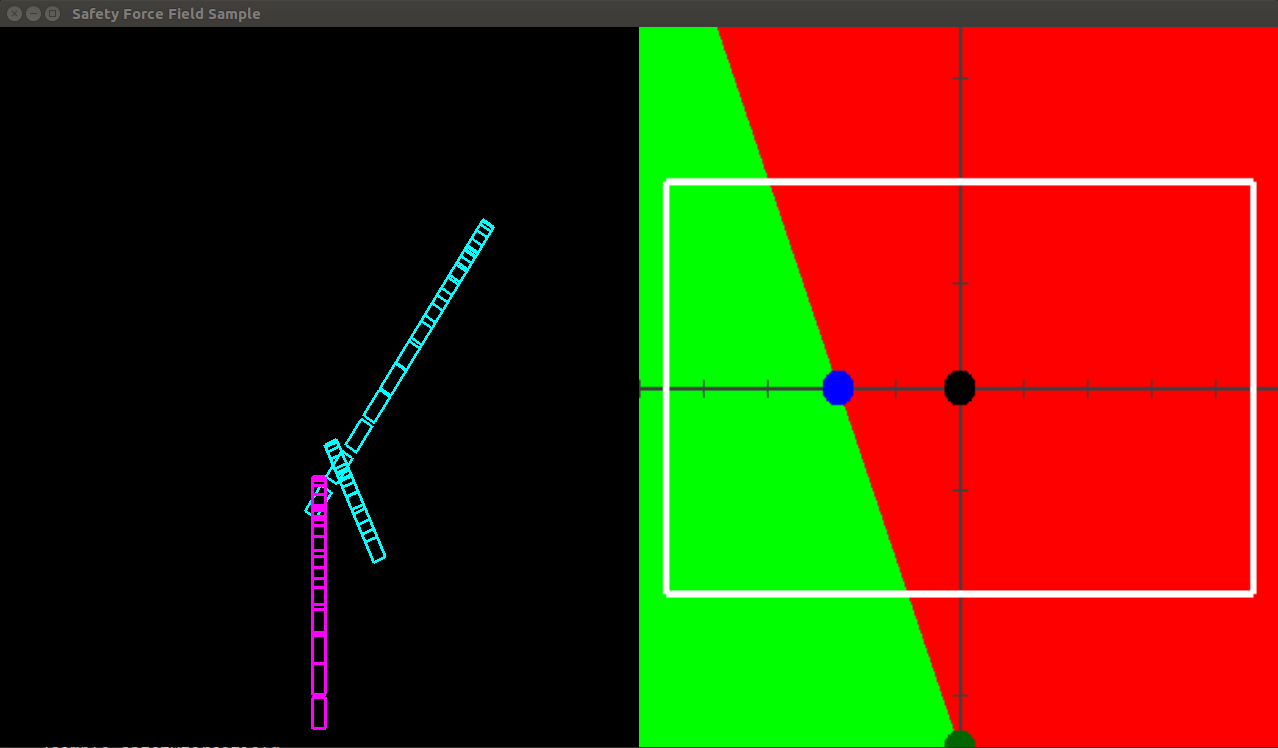
The output is composed of two images:
- The left image is a top down view of the claimed sets, i.e., the likely trajectories of the actors executing their safety procedures.
- The right image is a control constraint image of the ego-vehicle.
In the top down view of claimed sets:
- The ego-vehicle's claimed set is magenta.
- Other vehicles claimed sets are cyan.
- Rendering hovers over the ego-vehicle, where the claimed set remains stationary.
In the control constraint image:
- The X-axis indicates the front wheel steering angle. Any pixel on the left half of the image has a positive steering angle. On the X-axis there is one gray marking per degree.
- The Y-axis indicates acceleration. Any pixel on the top half of the image has positive acceleration. On the Y-axis there is one gray marking per meter per second squared.
- The white unfilled box indicates the steering angle and acceleration limits.
- A green pixel indicates a safe control, which meets all control constraints.
- A red pixel indicates an unsafe control, which violates at least one of the control constraints.
- The black circle is the ego-vehicle's control before actuation.
- The blue circle is the ego-vehicle's control after actuation.
- The dark green circle is the initial control on the ego-vehicle's safety procedure.
Additional Information
For more details, please refer to Safety Force Field.