Table of Contents
- Note
- SW Release Applicability: This sample is available in both NVIDIA DriveWorks and NVIDIA DRIVE Software releases.
Description
The Stereo Disparity sample demonstrates the stereo pipeline.
The sample reads frames from two stereo videos and rectifies them on the basis of the camera calibration contained in the rig configuration file. Then, it runs the frames through the stereo pipeline and displays a confidence map and final stereo output.
Running the Sample
The command line for the sample is:
./sample_stereo_disparity --rigconfig=[path/to/rig/configuration/file]
--video-left=[path/to/the/left/video]
--video-right=[path/to/the/right/video]
--sensor-left=[name/of/left/camera/in/rig/file]
--sensor-right=[name/of/right/camera/in/rig/file]
--level=[0|1|2|3]
--single_side=[0|1]
--maxDisparity=[maximum/disparity/for/stereo/match]
--maxDistance=[maximum/distance/in/meters/for/depth/rendering]
where
--rigconfig=[path/to/rig/configuration/file]
Points to the rig file that contains the intrinsics and extrinsics for the stereo camera.
Default value: path/to/data/samples/stereo/full.json
--video-left=[path/to/the/left/video]
Is the path to the video recorded from the left camera.
Default value: path/to/data/samples/stereo/left_1.h264
--sensor-left=[name/of/left/camera/in/rig/file]
Is the name of the left input sensor in the rig file.
Defaul value: left_60FOV
--sensor-right=[name/of/right/camera/in/rig/file]
Is the name of the right input sensor in the rig file.
Defaul value: right_60FOV
--video-right=[path/to/the/right/video]
Is the path to the video recorded from the right camera.
Default value: path/to/data/samples/stereo/right_1.h264
--level=[0|1|2|3]
Defines the pyramid level to display the disparity, depends on the number of levels.
Default value: 1
--single_side=[0|1]
If `--single_side` is 0, the sample computes left and right stereo images
and performs complete stereo pipeline. Otherwise, it computes only the left
image and approximates occlusions by thresholding the confidence map.
Default value: 0
--maxDisparity=[maximum/disparity/for/stereo/match]
Maximum disparity value for stereo matching between left and right camera.
Default value: 128
--maxDistance=[maximum/distance/in/meters/for/depth/rendering]
Maximum distance in meters for depth rendering.
Every pixel with a depth greater than maxDistance is rendered as blue
Default value: 40.0
It is possible to use keyboard input to change parameters at runtime:
0-6: changes the level of refinement (0 no refinement) O : toggles occlusions K : infills occlusions (only if on) +,-: changes invalidy threshold (appears as white pixels) I : toggle horizontal infill of invalidity pixels L : switch between disparity view and rectification view
It is possible to left click on the disparity images to obtain the correspoding point depth value.
Output
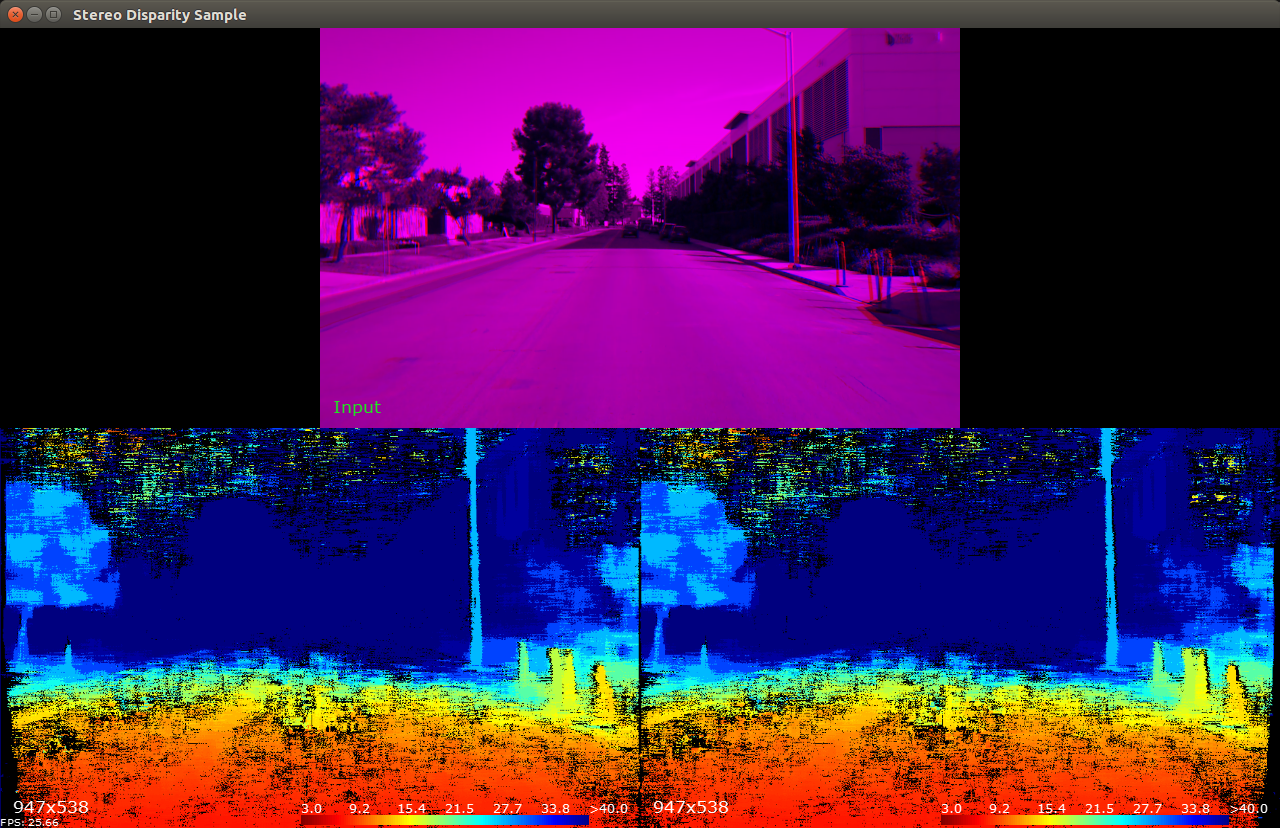
The sample creates a window and displays the disparity view composed by:
- Top: Anaglyph of left and right image
- Bottom: Stereo images
The stereo output is color coded for clarity and some pixels are masked if they are occluded or invalid.
By pressing L the view switches the rectification view composed by:
- Top: Input left and right image with parallel red line showing that epipolar lines are not parallel.
- Bottom: Rectified images.

Additional information
For more details see Stereo .