1 # Copyright (c) 2019-2020, NVIDIA CORPORATION. All rights reserved.
3 @page dwx_sample_intersection_detector Intersection Detection Sample (WaitNet)
6 @note SW Release Applicability: This sample is available in **NVIDIA DRIVE Software** releases.
8 @section dwx_sample_intersection_detector_description Description
10 The Intersection Detection sample demonstrates how to use the NVIDIA® proprietary WaitNet deep neural network (DNN) to detect intersections.
11 It reads video streams sequentially. For each frame, it detects the
12 intersection location.
14 @section dwx_sample_intersection_detector_usage Running the Sample
16 The command line for the sample is:
18 ./sample_intersection_detector --rig=[path/to/rig/file]
23 --rig=[path/to/rig/file]
24 Rig file containing all information about vehicle sensors and calibration.
25 Default value with video: path/to/data/samples/waitcondition/rig.json
26 Default value with live camera: path/to/data/samples/waitcondition/live_cam_rig.json
29 Use live camera or video file. Takes no effect on x86.
30 Need to be set to 1 if passing in a rig with live camera setup.
31 To switch the mode, pass `--liveCam=0/1` as the argument.
34 @note The live camera type in rig file is a supported `RCCB` sensor.
35 See @ref supported_sensors for the list of supported cameras for each platform.
36 The video type in rig file can be raw or h264.
38 @subsection dwx_sample_intersection_detector_examples Examples
40 #### Running the sample with default rig file with video
42 ./sample_intersection_detector
44 #### Running the sample with rig file with live camera
46 ./sample_intersection_detector --liveCam=1
48 @section dwx_sample_intersection_detector_output Output
50 The sample creates a window, displays the video stream, and overlays the bounding box of the detected intersection.
51 When the ego car approaches to an intersection, bottom of the visualized bounding box aligns with stop line.
52 When the ego car is within an intersection, the visualized bounding box covers entire image area.
54 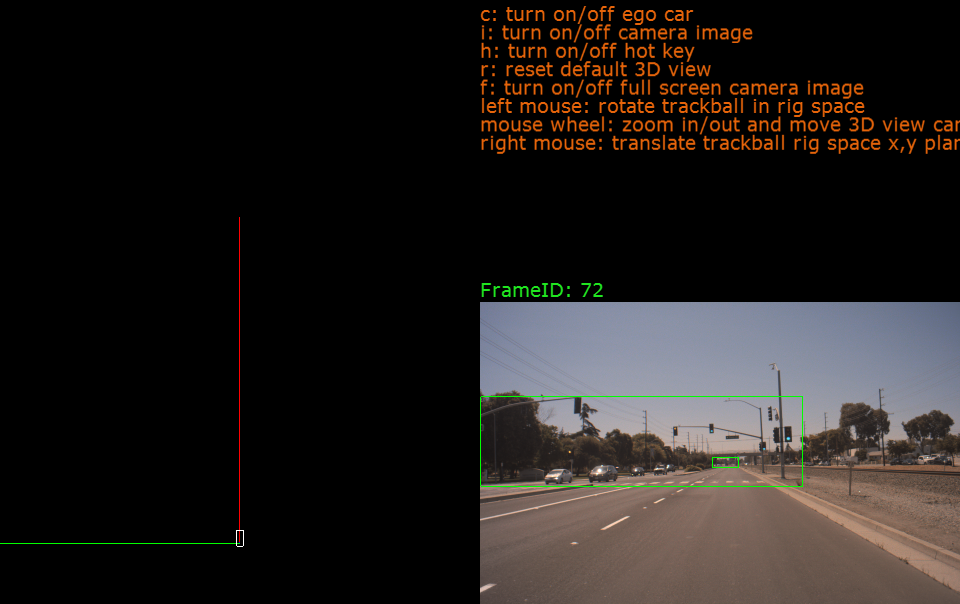
56 @section dwx_sample_intersection_detector_more Additional Information
58 For more details see @ref waitcondition_mainsection.