Table of Contents
Description
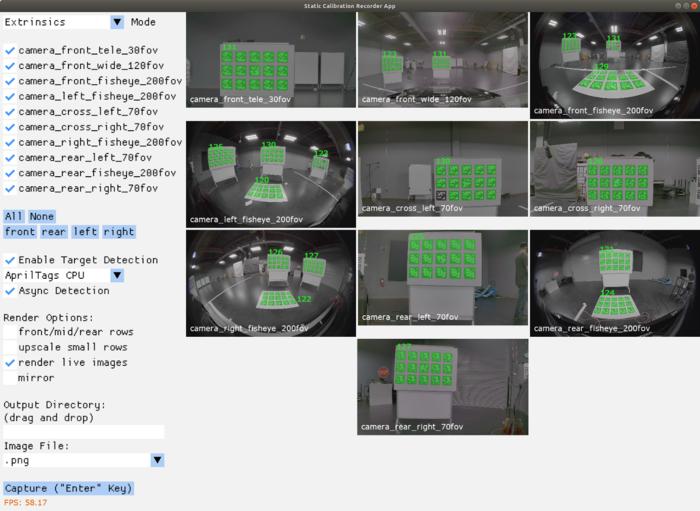
The Static Calibration Recorder Tool can be used to capture the data that is required by the Graph Calibration Tool. It takes a rig file as input and renders the live video streams of the rig's cameras. In "Extrinsics Mode" it allows to capture and store images from those camera video streams. In "Intrinsics Mode", the intrinsics constraints created by checkerboard marker detections are accumulated and can be stored to .json files that are required for further processing in the static camera calibration tool. The rig file can contain camera parameters for live camera access, or file paths to recorded files. Alternatively, when working with video files, a single video file can be provided instead of a rig file.
Prerequisites
This tool is available on the x86 Host System and NVIDIA DRIVE™ OS Linux.
Running the Tool
Run the tool by executing:
/calibration-recorder --rig=[path to rig file]
--targetDB=[path to targets.json file]
--output=[path to directory where new directories "intrinsics" / "extrinsics" (or "extrinsics_<number>" if "external" already exists) are created to store the results]
Parameters
--rig=[path to rig file]
Description: Rig file containing the cameras.
Example: --rig=rig.json
--video=[path to video file]
Video to be loaded as a virtual camera. This parameter is ignored if a rig is provided.
Example: --video=camera.mp4
--targetDB=[path to target database json file]
Description: Path to json file with apriltag target description. AprilTag detection is disabled if not provided.
Example: --targetDB=targets.json
--mode=[extrinsics / intrinsics]
Description: Optional. Set mode enabled at startup. (extrinsics / intrinsics)
Example: --mode=extrinsics
--checkerboard=[<width>x<height>]
Description: Optional. Set count of checkerboard squares at startup.
Example: --checkerboard=14x9
--output=[path to output directory]
Description: Directory in which the 'extrinsics' / 'intrinsics' output folders are created to store results
Example: --output=/tmp/calibration-data
--cameraSensorFifoSize=[number of frames in camera sensor fifo]
Description: Optional. Use a small value (minimum 1) to use less GPU memory. Use larger values to avoid frame drops. (Experimental Feature)
Example: --cameraSensorFifoSize=4
Usage
Image files with frame captures or .json files with intrinsics constraints (depending on current mode) are stored to the output directory when clicking the "Capture" button or pressing the "Enter" key. The output directory can be specified via command line parameter, by pasting a path into the corresponding UI, or by drag and dropping a directory onto the tool.
There is a UI to select the cameras to be rendered simultanously. This allows to observe and control the placement of calibration markers in the scene. When clicking on a camera while holding the control key, that camera is selected exclusively. See 2 Scene Setup for more details on how to setup the scene for extrinsics.
In "Intrinsics Mode", intrinsics constraints are accumulated for the enabled cameras when target detection is enabled. All currently accumulated intrinsics constraint points are rendered overlayed onto the live image as red dots. The number of currently collected intrinsics constraints are printed in parentheses next to the camera name. The points of the current target detection are rendered in green. In order to collect a constraint, the target has to be held still for a moment. Once the constraints have been collected at a position, the rendered dots of the current detection turn blue. When this happens, the target can be moved to the next pose. The detection-dots turn green again once the target has been moved sufficiently far away from the previously collected constraint. See 3.1 Capturing Data for Intrinsic Camera Calibration for more details about how to capture intrinsics constraints.

The results are stored to .json files when the "Save" button in the UI or the "Enter" key is pressed. If there are unsaved instrinsics constraints at program exit, they get saved to disk as well.
An intrinsics calibration can be performed on selected cameras with their currently collected constraints by pressing the "Calibrate" button. The resulting camera model parameters will then be printed to both the console and in the UI under the "Calibrate" button.
There is an option to select if and which images to store together with the intrinsics constraints for debugging and archiving purposes. By default, all frames for which an instrinsics constraint is collected are stored. It is possible to additionally store images where a target has been detected, but the detection is not used as a constraint. Finally, there's an option to store all processed frames, that is including also frames where no checkerboard is recorded.
If the targetDB parameter is omitted, AprilTag detection is not available, however checkerboard detection for intrinsics and frame capturing for extrinsics images is still possible.
Output
In "Extrinsics Mode" the tool outputs a screenshot for each camera listed in the rig. It creates a directory called "extrinsics" (as these captures are intended to be used for extrinsic camera calibration). If such a directory already exists, a suffix '_<number>' is appended to create a non-existing directory path. This avoids overwriting existing data. The capture images are stored inside that new directory as files named '<camera name>.png'. Similarly, in "Intrinsics Mode" the tool outputs a .json file with intrinsics constraints for each camera. If no intrinsics constraints are available for a camera, no file is written. Optionally, images files are stored for each constraint in the .json file.