1 # Copyright (c) 2019-2020 NVIDIA CORPORATION. All rights reserved.
3 @page dwx_imu_calibration_sample IMU Calibration Sample
6 @section dwx_imu_calibration_description Description
8 This sample demonstrates estimating IMU extrinsics with the
9 NVIDIA<sup>®</sup> DriveWorks Calibration Engine.
11 @section dwx_imu_calibration_running Running the Sample
13 The IMU calibration sample, `sample_calibration_imu`, accepts the following
14 optional parameters. If none are specified, the IMU extrinsics are estimated on
17 ./sample_calibration_imu --rig=[path/to/rig/configuration/file]
18 --imu-sensor=[integer/sensor-name]
19 --can-sensor=[integer/sensor-name]
20 --camera-sensor=[integer/sensor-name]
24 --rig=[path/to/rig/configuration/file]
25 Path to the rig configuration file.
26 Default value: path/to/data/samples/recordings/suburb0/imu_offset_rig.json
28 --imu-sensor=[integer]
29 The index or name of the IMU sensor in the rig configuration file to calibrate
32 --can-sensor=[integer]
33 The index or name of the CAN sensor in the rig configuration file
36 --camera-sensor=[integer]
37 The index or name of the camera sensor in the rig configuration file (used for visualization only)
40 @section dwx_imu_calibration_output Output
42 The sample does the following:
44 - Displays a video. The speed at which the video is displayed differs, depending
46 - Before convergence, the sample does not limit the video playback. As a result,
47 the visualization appears to be sped up.
48 - After convergence, the sample slows the video playback to the usual 30-frames
50 - Displays nominal calibration indicators (blue) and, after convergence, a
51 corrected calibration indicator (green). The indicator shows the estimated
52 rig horizon as seen in the camera's frame. The rig horizon shows the estimated
55 After convergence, the sample runs the sample data in a loop, during which the
56 calibration is further refined.
58 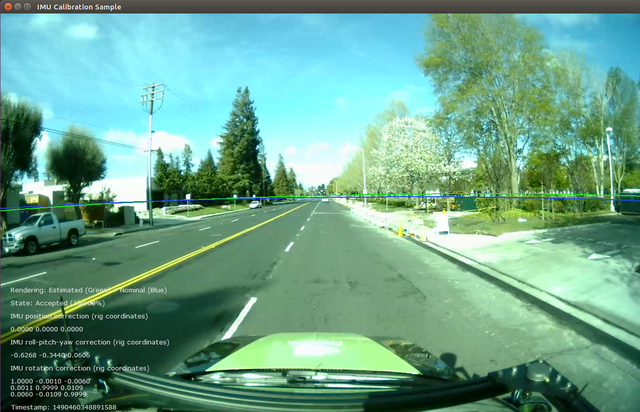
60 @section dwx_imu_calibration_more Additional information
62 For more information on IMU calibration, see @ref calibration_usecase_imu .