1 # Copyright (c) 2019-2020 NVIDIA CORPORATION. All rights reserved.
3 @page dwx_lidar_calibration_sample Lidar Calibration Sample
6 @section dwx_lidar_calibration_description Description
8 The NVIDIA<sup>®</sup> DriveWorks Lidar Calibration sample demonstrates how to use DRIVE Calibration's @ref calibration_mainsection module. The sample uses ICP (Iterative
9 Closest Point) to determine the relative transform between consecutive
10 sweeps of Lidar. Additionally, the sample performs computations on
11 the full point cloud of the latest sweep. Those additional computations are
12 independent of the relative transformation.
14 @section dwx_lidar_calibration_running Running the Sample
16 The Lidar Calibration sample, `sample_calibration_lidar`, accepts the following optional parameters. If none are specified, the Lidar extrinsics are estimated on
19 ./sample_calibration_lidar --rig=[path/to/rig/configuration/file]
20 --lidar-sensor=[integer/sensor-name]
21 --imu-sensor=[integer/sensor-name]
22 --can-sensor=[integer/sensor-name]
23 --output-rig=[output/rig/file]
30 --rig=[path/to/rig/configuration/file]
31 Path to the rig configuration file.
32 Default value: path/to/data/samples/lidar/rig_perturbed.json
34 --lidar-sensor=[integer]
35 The index or name of the lidar sensor in the rig configuration file to calibrate
38 --imu-sensor=[integer]
39 The index or name of the IMU sensor in the rig configuration file
42 --can-sensor=[integer]
43 The index or name of the CAN sensor in the rig configuration file
46 --output-rig=[output/rig/file]
47 Output rig configuration file, which contains updated Lidar Extrinsics.
48 Default value: rig_updated.json
51 Controls whether the runs through a dataset once, rather than a loop.
55 Whether or not ego-motion pose is fed to Lidar calibration (in addition to ICP pose).
59 Whether or not the sample prints detailed estimation together with Lidar sweep number.
62 To pause the sample, press `SPACE`.
63 \n To exit the sample, press `ESC`.
64 \n To rotate and move the camera while the sample is paused, select and drag the image.
66 @note Depending on `--rigOutFile`, you may need to start the sample with **sudo**.
68 @section dwx_lidar_calibration_output Output
70 The sample application shows the previous sweep (Red) and the aligned current sweep (Green).
71 After the calibration converges, the contour rectangle on the ground plane should
72 be aligned co-planar with the ground Lidar points and parallel to the driving direction.
74 The sample application also shows the state of the calibration and the percentage completed,
75 along with the computed update to the Lidar extrinsics calibration.
77 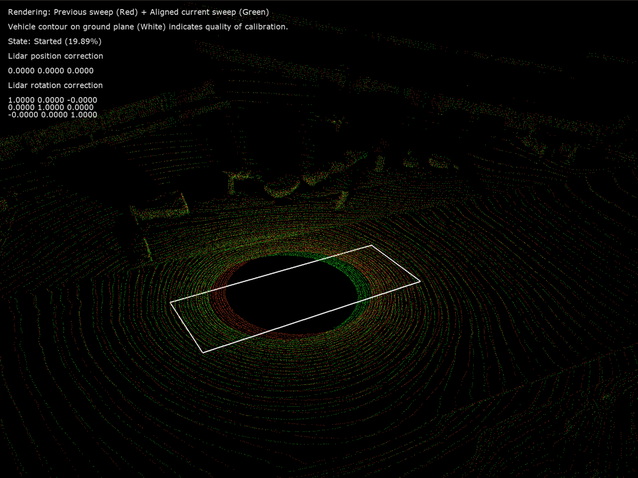
79 @section dwx_lidar_calibration_more Additional information
81 For more information on Lidar calibration, see @ref calibration_usecase_lidar.