Understanding KVBM components#
The design of the KVBM is inspired from vLLM and SGLang KV block managers but with a twist from historical memory tiering design aspired in general GPU programming [1,2]. Figure 2 shows the internal architecture of KVBM and how it works across workers using NIXL.
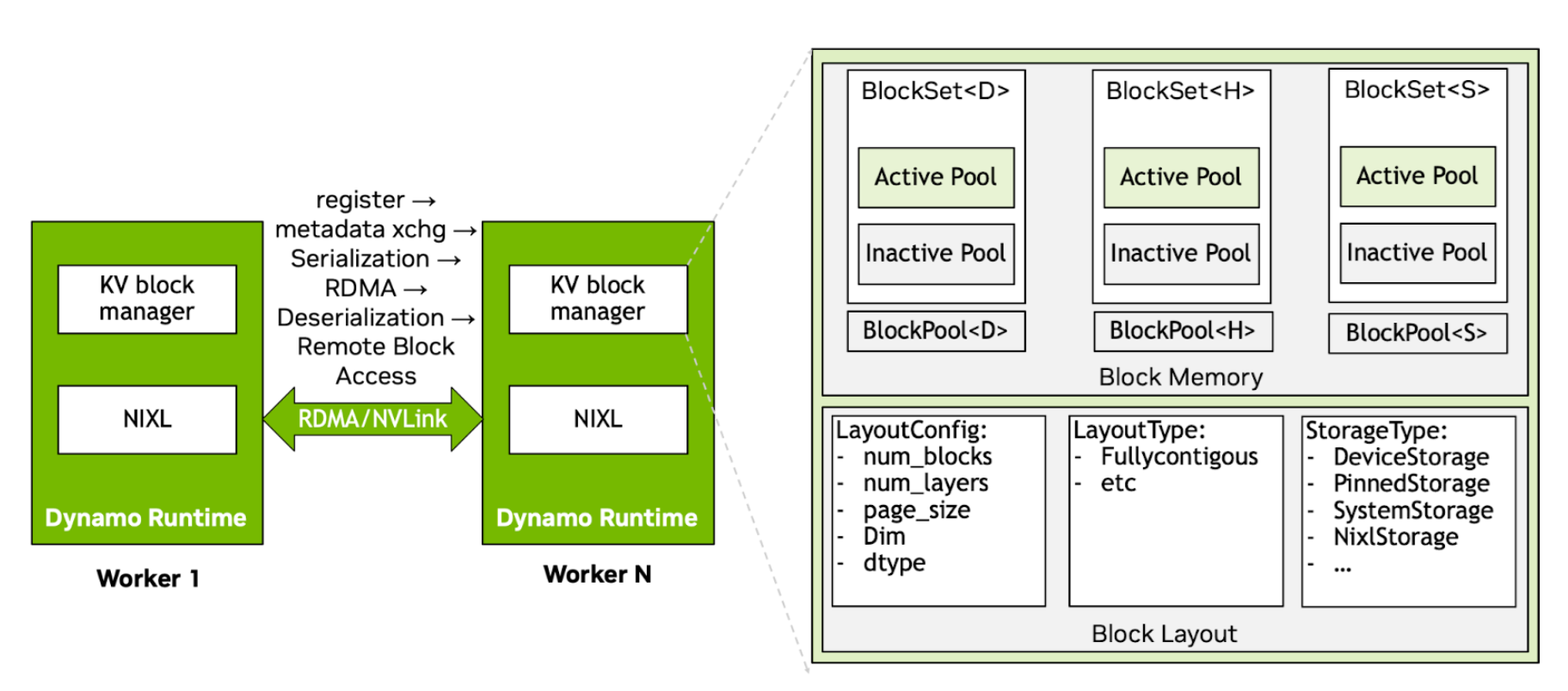 Internal architecture and key modules in the Dynamo KVBM
Internal architecture and key modules in the Dynamo KVBM
KvBlockManager as Orchestration Layer#
The `KvBlockManager<H, D>` acts as a coordinator across memory tiers—host (CPU), device (GPU), and remote—by managing per-backend block pools and exposing consistent block lifecycle APIs. It tracks KV block locations across device memory (G1), CPU memory within and across nodes (G2), local/pooled SSDs (G3), and remote storage (G4). G1-G4 are key tiers enabled by KVBM. Critical to note that KVBM treats G4 storage as an opaque blob store, unaware of internal layout optimizations.
`KvBlockManager<H, D>` owns:
A device-side `BlockPool<Device>`
A host-side `BlockPool<Host>`
A remote NIXL agent that allows communication and memory sharing across nodes
A block set registry for remote lookup and import/export of block metadata
Implementation-wise, `KvBlockManagerState` holds actual logic: it’s initialized by `KvBlockManagerConfig`, which merges runtime, model, and layout configs. Remote awareness is injected by `NixlOptions`.
Block Layout and Memory Mapping#
Each block is a 2D array `[num_layers][page_size × inner_dim]`. The memory layout is abstracted by the `BlockLayouttrait`. The default implementation is `FullyContiguous`, which stores all layers for all blocks in one region with alignment-aware stride computation:
```
block_stride_in_bytes = align_up(num_layers × layer_stride, alignment);
```
This memory layout is shared by both CPU and GPU pools but uses storage-specific backends:
`DeviceStorage` → CUDA device buffer
`PinnedStorage` → page-locked host memory
`SystemStorage` → CPU heap memory (fallback/test)
`NixlStorage` → remote memory via NIXL RDMA handles (includes storage)
Each layout is constructed using a `LayoutConfig`, and storage is either passed directly or allocated via a StorageAllocator.
BlockPool and Memory Pools (Active + Inactive)#
Each `BlockPool<T>` (where `T` is `DeviceStorage`, `PinnedStorage`, etc.) tracks two sub-pools:
`ActivePool`: Contains blocks currently in use by sequences
`InactivePool`: Recycled blocks ready for allocation. Think free list.
When a token block is requested (for example, `get_mutable_block()`), the allocator pops from `InactivePool`, transitions its state, and returns a writable handle. On sequence commit or eviction, blocks are reset and returned to the inactive pool.
The state machine (`BlockState`) that tracks the block lifecycle transitions includes:
State |
Description |
Ownership |
Valid Actions / Transitions |
|---|---|---|---|
Reset |
Block is uninitialized or has been reset. No sequence is associated. |
Held in InactivePool, reusable |
init_sequence(salt_hash) → Partial |
Partial |
Block is being filled with tokens for a new sequence. In-progress. |
Owned by the sequence creator |
add_token() / add_tokens() (accumulate)- commit() → Complete- reset() → Reset |
Complete |
Block is fully filled with token data but not yet visible to others. |
Still owned by creator thread |
register() → Registered- reset() → Reset |
Registered |
Block is finalized and visible for reuse. Available in the deduplication cache. Can use block for lookups |
Shared ownership (global registry) |
Auto drop() → triggers Remove event and transitions to Reset |
The valid KBVM block manager transitions are:
From → To |
Trigger |
Validation |
|---|---|---|
Reset → Partial |
init_sequence(salt_hash) |
Must not be in use |
Partial → Complete |
commit() |
Must be full |
Complete → Registered |
register() |
Must be finalized |
Registered → Reset |
Drop of RegistrationHandle |
Automatic |
Partial → Reset |
Aborted sequence |
Explicit or drop |
Complete → Reset |
Invalidated |
Explicit or drop |
An example lifecycle of a block in the KVBM block manager can be thought as below:
Let’s say a sequence requests a new KV block:
Allocator pops from InactivePool → Block is in Reset
init_sequence() → Transitions to Partial
Tokens are appended → State remains Partial
On full → commit() → State becomes Complete
Register() → Block is hashed and moved to Registered. Blocks can now be used to lookup.
On eviction or end-of-life → drop() of RAII handle returns block to Reset
Lifecycle Management via RAII and Event Plane#
The system uses RAII for memory lifecycle management. Every block holds metadata and registration state, and registration is coupled with an `EventManager`. On registration and drop:
`PublishHandle` triggers Register events
Dropping it triggers Remove events
This pattern ensures consistency for shared memory tracking across workers without requiring explicit deallocation logic. The events are propagated in the Dynamo Events plane and any Dynamo component subscribed to the events plane can listen to these changes. Note that even the storage provider can subscribe to the events plane and create an internal prefix tree representation tailored and optimized for their platform.
Remote Memory Integration via NIXL#
The NIXL agent exposes remote memory buffers using `NixlBlockSet`, `RemoteBlocks`, and layout descriptors. Key operations include:
`nixl_register()`: Registers memory region with NIXL runtime
`serialize() / deserialize()`: Converts layout and memory into transferable descriptors
`import_remote_blockset()`: Loads remote node’s block layouts into the manager
`get_remote_blocks_mutable()`: Fetches transferable memory views from another node
`RemoteBlocks` is a lightweight abstraction over shared memory for cross-node block usage (via UCX or other backends).
The left side of the Figure 2 illustrates a bidirectional remote memory registration and layout synchronization protocol between workers (e.g., Worker 1 and Worker 2) using NIXL.
Agent Creation & Memory Registration:
Each worker independently sets up a NixlAgent:
Registers its memory regions (e.g., device memory) via nixl_register().
These regions correspond to blocks managed in the local BlockPool. Once memory is registered, NIXL creates remote-accessible descriptors, which are bound to the memory layout.
Metadata exchange:
After memory registration, workers exchange serialized layout metadata, encapsulated in a `SerializedNixlBlockLayout`. Why is this step critical?
LLM inference workloads often differ in tensor parallel (TP) configurations.
Worker 1 might have TP=4, while Worker 2 has TP=8.
Hence, even if both systems use similar `FullyContiguous` layouts, their internal slicing and alignment assumptions differ.
The metadata exchange bridges this semantic mismatch by sharing:
LayoutConfig (num_layers, page_size, inner_dim, dtype)
BlockSetID
Base address + stride information (including alignment)
Device ID + memory type (host/device)
Once shared, each worker can reconstruct the layout on its side using deserialize(). This enables NIXL to:
Understand where each layer/block lives
Perform correct gather-scatter operations during RDMA-like transfers Without this step, remote fetches would result in data corruption or misaligned tokens.
Serialization & Deserialization: Making Layouts Portable
In the serialization stage, KVBM exports, `FullyContiguous::serialize()` encodes:
FullyContiguousConfig
base_offset
Physical memory descriptors (NixlStorage) including:
Memory type (VRAM, DRAM)
Address & size
Device ID
This is sent over using NIXL transfer and then injected into a KVBM scheduler state. In the deserialization stage, `SerializedNixlBlockLayout::deserialize()` rehydrates this into:
A fully reconstructed memory layout view
Local representation of a remote memory slice with correct offsets and size semantics
Enables direct access to remote memory with consistent logical semantics This guarantees that even across different system configurations (hardware or LLM shape), both parties agree on the memory view for each KV block.
Ownership handles and lifetime tracking
Memory ownership in NIXL is tightly coupled with RAII-based handles:
When a block is registered, it returns a `PublishHandle` which wraps a `RegistrationHandle`.
On drop of this handle, an automatic Remove event is published, which:
Deregisters the block from the NIXL layer
Removes it from the remote block registry
This ensures that once the block is evicted from the cache or no longer used in inference, all references are invalidated cleanly across nodes. This mechanism avoids:
Stale memory access
Dangling pointers on GPU or host
Manual deregistration bugs The system can batch and publish registration events via a Publisher, optimizing performance under high concurrency.
Storage backends and pluggability#
Integrating KVBM with storage backend is extremely trivial by extending or wrapping `NixlEnabledStorage` to support cross-node RDMA registration. All layouts and block pools are generic over these backends, allowing for fine-grained control over memory tiers. We are deferring detailed integration guidance as we are actively collaborating with storage partners to simplify and standardize these integration paths.
An example system architecture
+------------------------------+
|Distributed Inference engine |
+------------------------------+
|
v
+------------------------------+
| Dynamo KV Block Manager |
+------------------------------+
|
+----------------+----------------+
| |
v v
+------------------------------+ +----------------------------+
| NIXL Storage Agent | | Event Plane |
| - Volume registration | | - NATS-based Pub/Sub |
| - get()/put() abstraction | | - StoreEvent / RemoveEvent |
+------------------------------+ +----------------------------+
| |
v v
+-----------------------------+ +-----------------------------+
| G4 Storage Infrastructure | | Storage Provider Subscriber |
| (SSD, Object store, etc.) | | - Parse Events |
| - Store KV blocks | | - Build fast tree/index |
+-----------------------------+ | - Optimize G4 tiering |
+-----------------------------+
For now, the following breakdown provides a high-level understanding of how KVBM interacts with external storage using the NIXL storage interface and the Dynamo Event Plane:
NIXL Storage Interface (for Backend Integration)#
The NIXL interface abstracts volume interaction and decouples it from mounting, metadata tracking, or direct system I/O. It provides:
registerVolume(descriptor): Register a logical volume for KV cache data.
unregisterVolume(): Cleanly deregister and release volume mappings.
get() / put(): Block-level APIs used by KVBM to fetch and store token blocks.
These abstractions allow backends to be integrated without tying into the host’s file system stack, enabling safe interaction with block devices, local filesystems, and RDMA-capable volumes. Please note that these APIs are still being finalized.
Dynamo Event Plane (Pub/Sub Coordination Layer)#
To support external storage optimizations without modifying KVBM logic, we provide an event plane built on NATS.io that emits lifecycle events for all block operations. Particularly there are two events emitted.
StoreEvent: Emitted when a KV block is registered.
RemoveEvent: Emitted when a KV block is released or evicted.
Each KVEvent (~100 bytes) contains:
sequence_hash: Unique identifier of the KV block
prefix_hash: Prefix grouping for query-level aggregation
block_size: Size in bytes
storage_location: Logical volume identifier
event_type: Store or Remove
extra_metadata: Reserved fields for partner-specific optimization
These events are batched and published periodically (e.g., every ~10s or dynamically based on system load) for scalability.
A conceptual design of a storage advisor#
This section provides an overview for the storage provider who is interested in integrating as a custom backend to KVBM and providing optimized performance. Please note, this is optional and not required for KVBM to integrate with a backend.
External storage systems are not tightly coupled with Dynamo’s execution pipeline. Instead, they passively observe KV block lifecycle events through a subscription model:
Storage volumes are pre-provisioned and mounted by the storage provider.
These volumes are then registered with Dynamo via the NIXL Storage Agent using registerVolume() APIs. Dynamo itself does not manage mounts or provisioning.
The Dynamo KV Block Manager interacts only with logical block-level APIs (i.e., get() and put()).
In parallel, the Event Plane asynchronously broadcasts KV lifecycle events using a NATS-based pub/sub channel.
Storage vendors implement a lightweight subscriber process that listens to these events without interfering with the KV Manager’s runtime behavior.
This decoupling ensures that external storage systems can optimize block placement and lifecycle tracking without modifying or instrumenting the core Dynamo codebase.
Now, to enable fast lookup and dynamic tiering, storage vendors may build internal data structures using the received event stream. Here is a high level conceptual design:
On receiving a StoreEvent, the storage system:
Inserts a record into an internal prefix tree, hash map, or LRU index.
This record includes the prefix_hash and sequence_hash, which logically identify the token block and its grouping.
Associated metadata (e.g., block_size, storage_location) is also captured.
On receiving a RemoveEvent, the system:
Deletes or prunes the corresponding record from its index.
Optionally triggers cleanup or tier migration workflows.
This event-driven indexing allows the storage system to track which KV blocks are live and where they belong—enabling low-latency lookup, efficient space reclamation, and multi-tier coordination. With real-time visibility into KV block usage patterns, the storage system can implement smart tiering policies, such as:
Hot block promotion: Frequently accessed KV blocks can be migrated to fast SSD volumes.
Cold block demotion: Infrequently used blocks can be demoted to slower storage (e.g., HDDs, cloud object storage).
Proactive compaction: If block sizes or prefix patterns indicate fragmentation, the storage backend can coalesce or rewrite blocks.
These optimizations are performed entirely outside of Dynamo, with the assumption that storage providers adhere to SLA guarantees and volume availability.
Critically, this entire system is designed to be non-intrusive:
The Dynamo KV Block Manager remains agnostic to how data is stored or optimized.
The Event Plane does not block or intercept any critical path of inference.
Storage vendors are given the freedom to innovate and optimize without requiring changes to the inference runtime.
This design ensures that performance, resilience, and extensibility scale independently across the KV layer and the storage backend layer.