Description
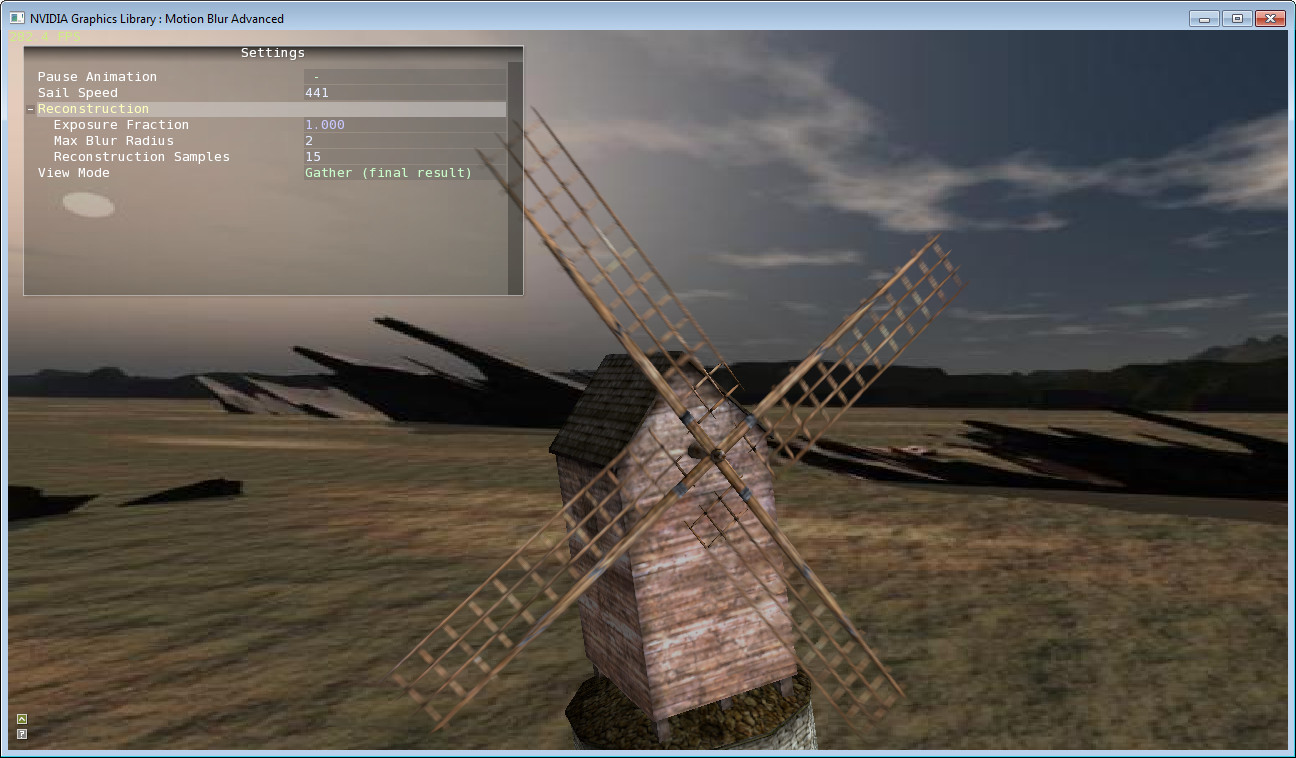
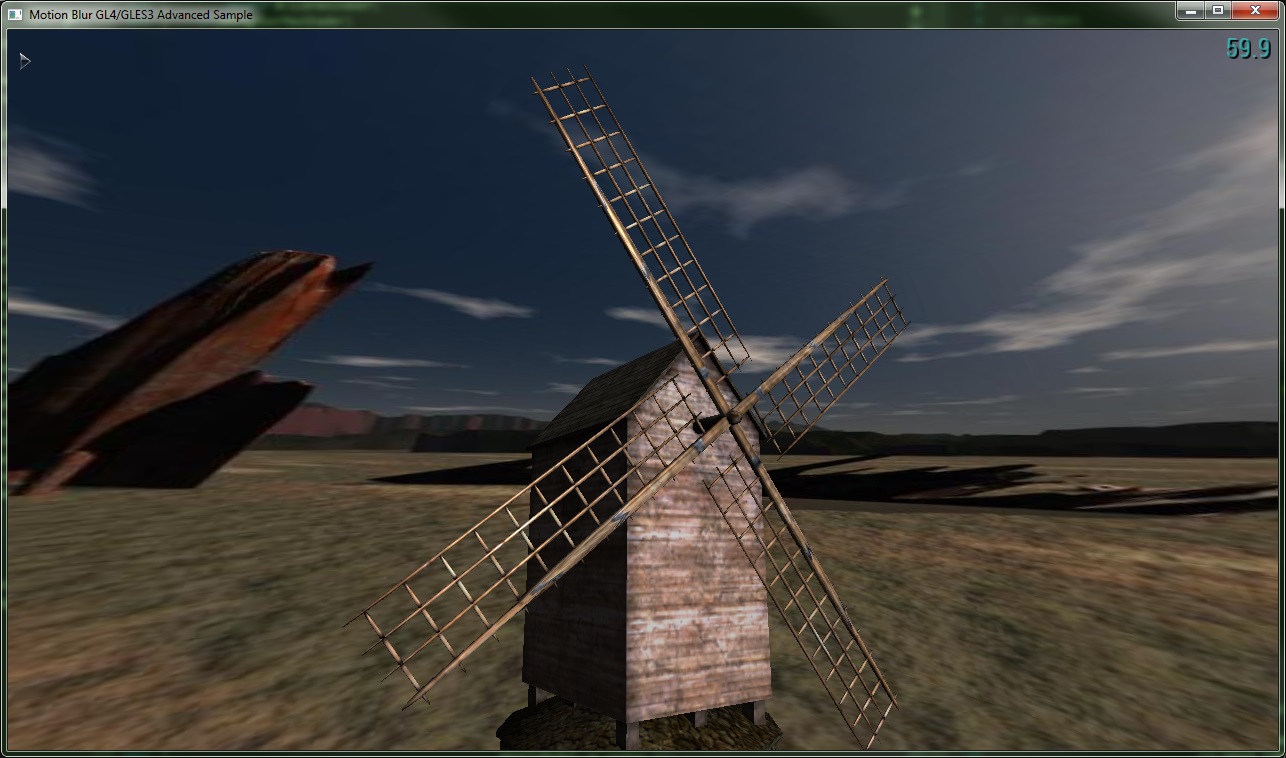
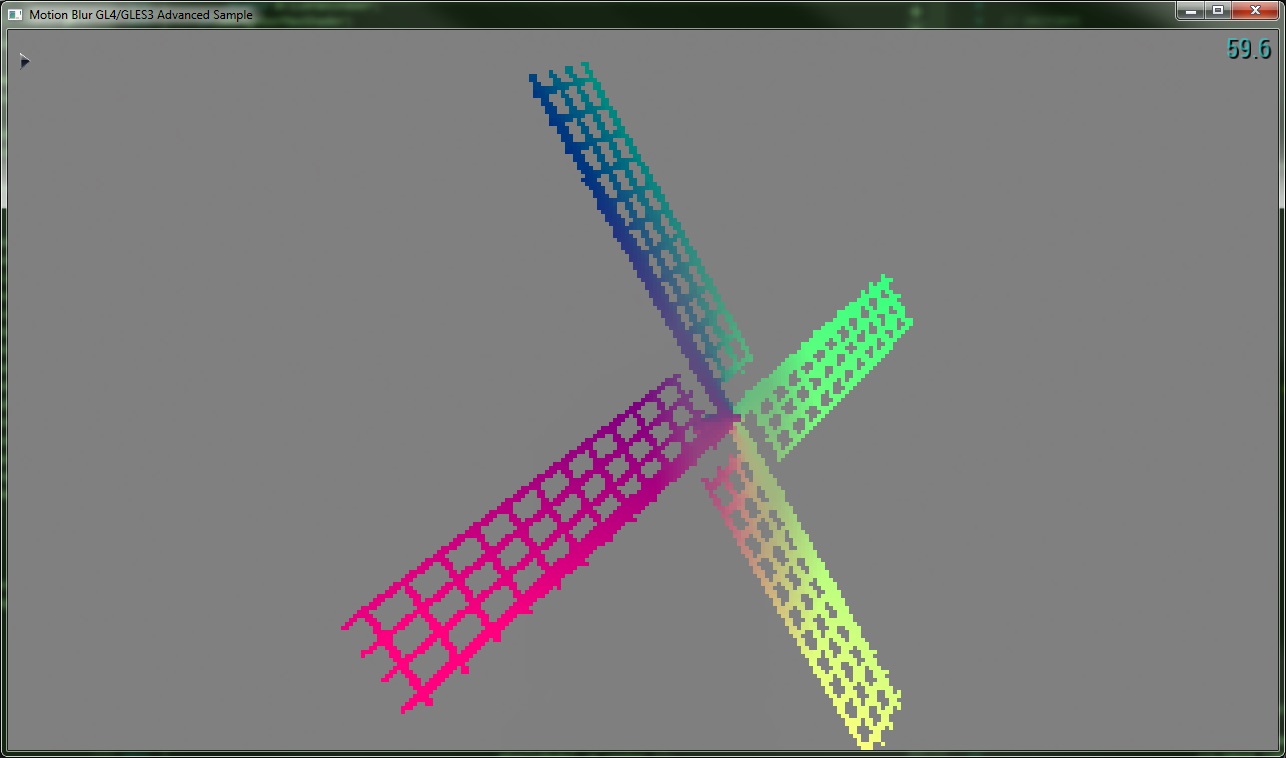
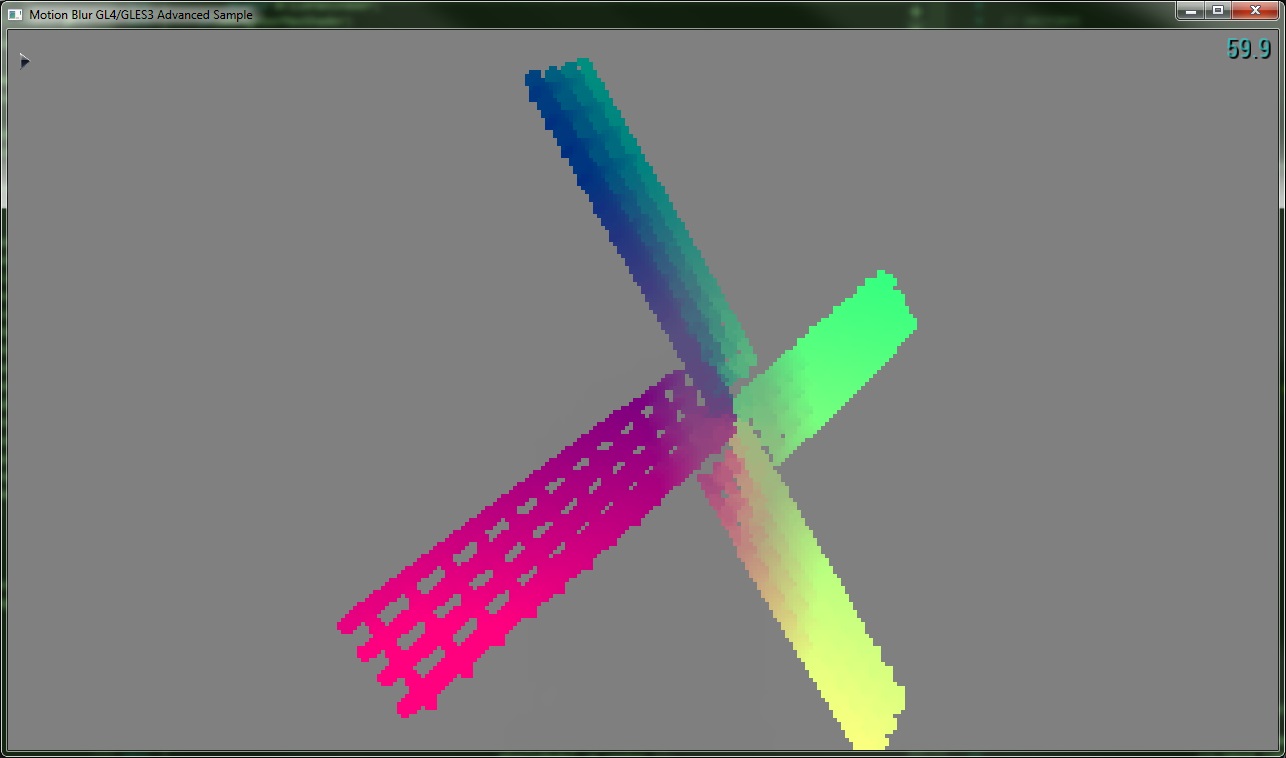
This sample shows a filtering method for simulating motion blur of fast-moving objects. The method used is a 2D full-screen post-process that works on a normal framebuffer augmented with a screen-space velocity buffer; thus, filtering performance is not dependent on scene geometric complexity. The algorithm is based on the paper 'A Reconstruction Filter for Plausible Motion Blur', by McGuire et. al. (SIGGRAPH I3D'12).