12_camera_v4l2_cuda (camera capture CUDA processing)
Overview
This sample demonstrates how to capture images from a V4L2 YUV type of camera and share the image stream with NVIDIA® CUDA® engines to draw a black box on the upper left corner.
Building and Running
Prerequisites
- You have followed Steps 1-3 in Building and Running.
- If you are building from your host Linux PC (x86), you have followed Step 4 in Building and Running.
- You have the following hardware:
- V4L2 Camera (USB or YUV Camera with the format YUYV/YVYU/UYVY/VYUY)
- Display
To build:
- Enter:
$ cd 12_camera_v4l2_cuda $ make
To run
Enter:
$ ./camera_v4l2_cuda -d /dev/video0 -s 1280x720 -f YUYV -c
The -c option enables CUDA processing.
Or enter:
$ ./camera_v4l2_cuda -d /dev/video0 -s 640x480 -f YUYV -n 30 -c
The -n option saves the n-th frame before video converter processing.
To view supported options
- Use the
-hoption.
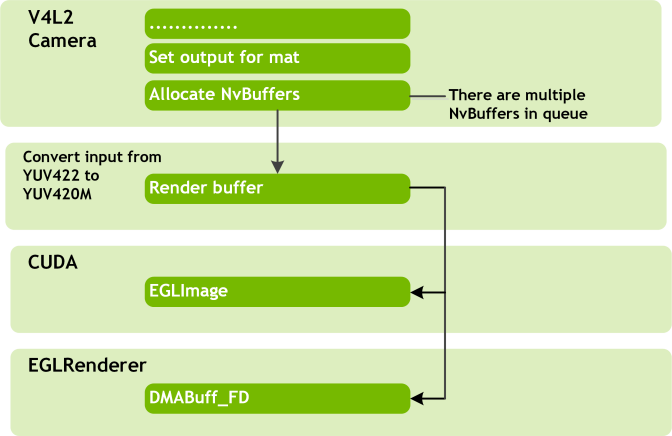
Flow
The following diagram shows the flow of data through this sample.
Block Diagram
Key Structure and Functions
The sample defines the structure and functions listed in the following tables.
| Structure | Description |
|---|---|
| context_t | Global structure to save the context for V4L2 camera, CUDA and EglRenderer. |
| Function | Description |
|---|---|
| init_components | Initializes V4L2 camera and EglRenderer. |
| prepare_buffers | Allocates buffers for the capture_plane. Then, it shares the buffers with V4L2 Camera, CUDA, and EglRenderer. |
| start_stream | Starts V4L2 camera streaming. |
| start_capture | Main thread to enqueue and dequeue buffers. |
| stop_stream | Stops V4L2 camera streaming. |