DeepStream 3D Depth Camera App¶
The deepstream-3d-depth-camera sample application is provided at app/sample_apps/deepstream-3d-depth-camera for your reference. This example demonstrates two different pipelines which bring depth camera from 2D into 3D world.
The depth and color data capture component is produced by Intel® RealSense™ Depth Camera D435 series. For more details, see https://www.intelrealsense.com/depth-camera-d435/.
Prerequisites¶
You must have the following development packages installed:
GStreamer-1.0
GStreamer-1.0 Base Plugins
GStreamer-1.0 gstrtspserver
X11 client-side library
libyaml-cpp-dev
RealSense SDK
To install these packages, execute the following command:
sudo apt-get install libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev \ libgstrtspserver-1.0-dev libx11-dev libyaml-cpp-dev
Follow the RealSense SDK documentation to add RealSense public key and list of repositories. For x86, refer to https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md. For Jetson platforms, refer to https://github.com/IntelRealSense/librealsense/blob/master/doc/installation_jetson.md. You may use Ubuntu 20.04 source path into apt-repository to install dependencies.
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
Then install
librealsense2package to build and test.sudo apt-get install librealsense2-utils librealsense2-dev
Make sure RealSense SDK version is not earlier than 2.48.
Plugin in Intel RealSense Depth D400 series USB camera. To verify the camera and upgrade firmware, run
realsense-viewerand update from the UI. Navigate to the folder sources/apps/sample_apps/deepstream-3d-depth-camera.If you are running these commands inside deepstream container, make sure camera devices are mounted in the
docker runcommand. For example:docker run --rm -it --gpus '"device=0"' --device /dev/video0 --device /dev/video1 --device /dev/video2 ...
Export
DISPLAYenvironment to the correct display. for example,export DISPLAY=:0.0.
Depth Color Capture to 2D Rendering Pipeline Overview¶
This is the first pipeline from the depth capture to 2D based depthmap to direct rendering with linear colors configured by the user.
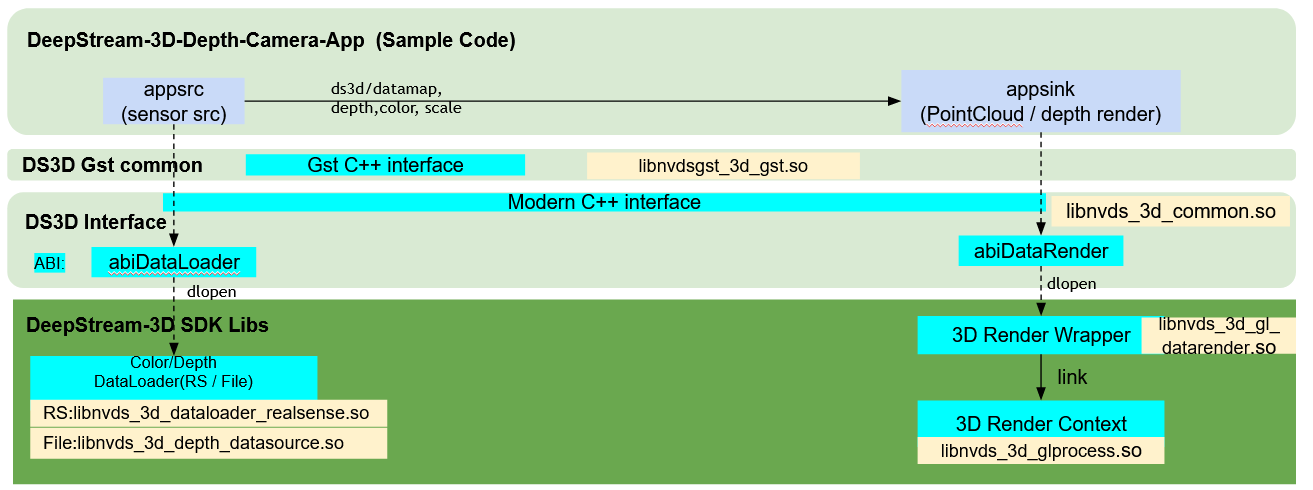
The pipeline is setup by ds_3d_realsense_depth_capture_render.yaml. It has 2 components, ds3d::dataloader for depth/color and datarender for GLES 2D render.
ds3d::dataloaderloads custom liblibnvds_3d_dataloader_realsense.soand creates a RealSense dataloader through thecreateRealsenseDataloaderfunction. This specific loader is configured for output streams of [color, depth]. Gst-appsrc connects the dataloader into the deepstream pipeline.name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader
ds3d::datarenderloads custom liblibnvds_3d_gl_datarender.soand create a GLES render through thecreateDepthStreamDataRenderfunction. This specific loader is configured for 2D depth and color images. Gst-appsink connects the datarender into the deepstream pipeline.name: depth-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createDepthStreamDataRender
realsense_dataloadercaptures color and depth streams inds3d/datamap, then delivers the data tods3d::datarendercomponentdepth-render.
Depth Color Capture to 3D Point Cloud Processing and Rendering¶
The 2nd pipeline is from depth capture, 3D point cloud processing and alignment, to the 3D point cloud rendering with colors.
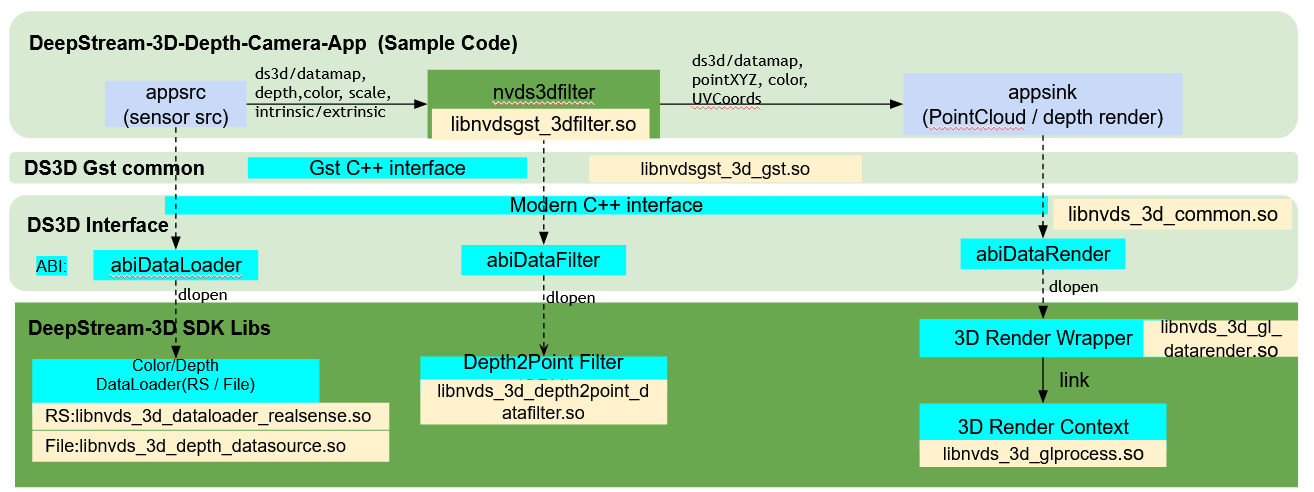
The 2nd pipeline is setup by the ds_3d_realsense_depth_to_point_cloud.yaml. It has 3 components: ds3d::dataloader for depth/color capture, ds3d::datafilter for depth-to-point-cloud processing, and datarender for GLES 3D points render.
ds3d::dataloaderis the same as the 1st pipeline for depth and color capture. It also outputs the intrinsic parameters of the color/depth sensors, and extrinsic parameters from depth to color sensor module.name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader
ds3d::datafilterloads custom liblibnvds_3d_depth2point_datafilter.soand creates a depth-to-3D-point processing filter through thecreateDepth2PointFilterfunction. This specific filter generates the 3D point-cloud dataset from depth, and calculates a UV-coordinate map for correspondence between points and color position. It requires sensors’ intrinsic and extrinsic data fromdataloaderto make the alignment.name: point2cloud_datafilter type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_3d_depth2point_datafilter.so custom_create_function: createDepth2PointFilter
ds3d::datafilteris loaded by thenvds3dfilterGst-plugin which acceptsin_capsas sink_caps andout_capsas src_caps. It creates a customds3d::datafilterinstance and processess data asds3d/datamap.ds3d::datarenderloads custom liblibnvds_3d_gl_datarender.soand create a GLES render through thecreatePointCloudDataRenderfunction . This specific loader is configured for 3D points and colors rendering. It also supports 3D scene rotation based on mouse-drag.name: point-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createPointCloudDataRender
realsense_dataloadercaptures color and depth streams along with the intrinsic and extrinsic parameters of the sensor inds3d/datamap. It then delivers the data to the next componentpoint2cloud_datafilter. This component generates 3D point-cloud data and UV coordination map into new output datads3d/datamap. Finally, the data is delivered tods3d::datarendercomponentpoint-renderfor 3D rendering.
Inside the configuration files,
in_capsandout_capscorrespond to Gstreamer’s sink_caps and src_caps.
Getting Started¶
Run RealSense Camera for Depth Capture and 2D Rendering Examples¶
Run the depth capture 2D render pipeline:
$ deepstream-3d-depth-camera -c ds_3d_realsense_depth_capture_render.yaml
This sets up a realsense dataloader.
name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader
It then streams ds3d/datamap to final the rendering component: depth-render.
name: depth-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createDepthStreamDataRender
The depth-render custom lib shall display the depth data and color data together in same window. Update
min_depth/max_depthto remove foreground and background objects in the depth rendering. From RealSense specification, D435 Camera depth range is between0.3and3meters.
min_depth: 0.3 # in meters max_depth: 2.0 # in meters
Update min_depth_color/min_depth_color [R, G, B] values to visualize color map of depth.
min_depth_color: [255, 128, 0] # RGB color value for mininum depth max_depth_color: [0, 128, 255] # RGB color value for maximum depthThe other colors are linearly interpolated between
min_depth_colorandmax_depth_color
Run 3D Depth Capture, Point Cloud filter, and 3D Points Rendering Examples¶
Run the depth capture and 3D processing pipeline:
$ deepstream-3d-depth-camera -c ds_3d_realsense_depth_to_point_cloud.yaml
This sets up a realsense dataloader (same as 2D depth). It then streams ds3d/datamap to the downstream datafilter component point2cloud_datafilter.
name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader
- It streams ds3d/datamap to the
nvds3dfilterGst-plugin which loadspoint2cloud_datafilterto convert 2D depth into 3D points. For more details onnvds3dfilterGst-plugin, See Gst-nvds3dfilter. name: point2cloud_datafilter type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_3d_depth2point_datafilter.so custom_create_function: createDepth2PointFilter
- It streams ds3d/datamap to the
Finally the data stream as ds3d/datamap is delivered to the render component
point-render.name: point-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createPointCloudDataRender
Fields of view_* are the eyes of the view position, similar to the OpenGL
gluLookAt().view_position: [0, 0, -1] # view position in xyz coordinates view_target: [0, 0, 1] # view target which is the direction pointing to view_up: [0, -1.0, 0] # view up direction
Fields of near/far/fov are the perspective range of the eye, similar to the OpenGL
gluPerspective().near: 0.01 # nearest points of perspective far: 10.0 # farmost points of perspective fov: 40.0 # FOV of perspective
DeepStream 3D Depth Camera App Configuration Specifications¶
deepstream-3d-depth-camera [ds3d::userapp] group settings¶
The table below demonstrates the group settings for ds_3d_realsense_depth_to_point_cloud.yaml as an example.
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
type |
Specify type ds3d::userapp |
Component type for user debug |
Must be type: ds3d::userapp |
name |
Indicate user-defined component name |
String |
name: debugdump |
enable_debug |
Indicate whether enable debug log |
Boolean |
enable_debug: False |
dump_depth |
Indicate file location to dump depth raw data |
String |
dump_depth: depth_uint16_640x480.bin |
dump_color |
Indicate file location to dump color raw data |
String |
dump_color: color_rgba_1920x1080.bin |
dump_points |
Indicate file location to dump 3D points raw data. datatype is Float and XYZ packed |
String |
dump_points: pointxyz.bin |
DS3D Custom Components Configuration Specifications¶
See more details in the DS_3D supported custom components specifications section in the DeepStream 3D Custom Manual.
Build application From Source¶
Go to the folder sources/apps/sample_apps/deepstream-3d-depth-camera.
Run the following commands:
$ Set CUDA_VER in the MakeFile as per platform. For x86, CUDA_VER=12.1 For Jetson, CUDA_VER=11.4 $ make $ make install
Note
Check the source code for more details on how to load dataloader/datarender through
Gst-appsrcandGst-appsink. datafilter is loaded by thenvds3dfilterGst-plugin.