Overview
The Minimum/Maximum Location algorithm performs a 2D search operation on the input image. The algorithm looks for the minimum and maximum values of the pixels, which results in two sets of pixel locations for the minimum and maximum values. The locations are the \((x,y)\) coordinates of the pixels matching exactly the global minimum or maximum value. This operation is useful to locate peaks on an image, either highest or lowest or both.
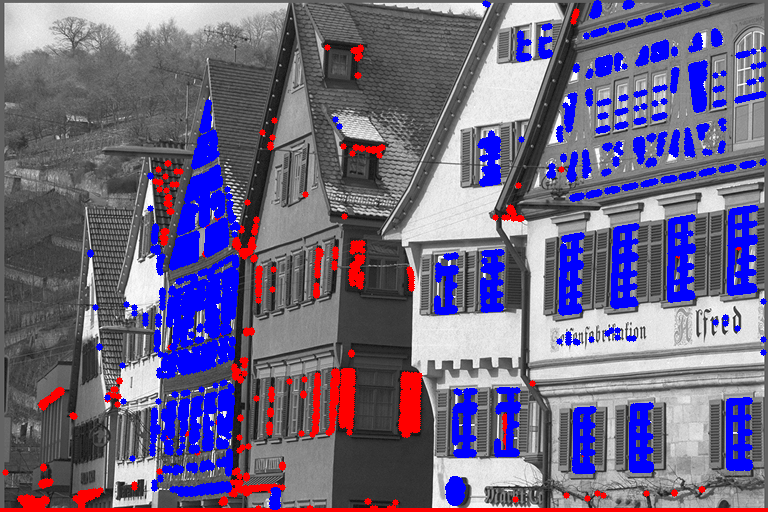
This example shows an input image on the left with its corresponding minimum (blue) and maximum (red) locations on the right.
| Input | Output |
|---|---|
 |  |
Implementation
The algorithm searches for the minimum and maximum values in the input image. Each pixel matching the minimum value has its location stored in an output array. The same is done for the maximum value in a second output array. Multiple locations of the same value, either minimum or maximum, may be found.
The location in the image is a keypoint with \((x, y)\) coordinates, corresponding to the \((j, i)\) matrix-based coordinates, respectively. The locations are stored in the user-provided output array up to the array capacity, which is defined upon array creation. This is done for both minimum and maximum output arrays. The maximum number of locations returned may be different for each array, as their corresponding capacity might differ. The user may choose not to provide an output array (by passing NULL in the argument) in which case the corresponding locations will not be searched for.
Usage
Language:- Import VPI module import vpi
- Run MinMaxLoc search on the input image using the CPU backend. Input is a VPI image. with vpi.Backend.CPU:min_coords, max_coords = input.minmaxloc(min_capacity=10000, max_capacity=10000)
- Optionally, retrieve the minimum and maximum values.
- Lock the input image and the minimum/maximum output arrays to efficiently access their contents. with input.lock(), min_coords.lock(), max_coords.lock():
- Retrieve the coordinates of the first pixels with minimum and maximum values. The (x,y) coordinates are being swapped to (y,x) and converted into a tuple, suitable for 2D numpy array indexing. min_loc = tuple(min_coords.cpu()[0].astype(int)[::-1])max_loc = tuple(max_coords.cpu()[0].astype(int)[::-1])
- Use the first of these coordinates to retrieve the minimum/maximum pixel value. min_value = input.cpu()[min_loc]max_value = input.cpu()[max_loc]
- Lock the input image and the minimum/maximum output arrays to efficiently access their contents.
- Initialization phase
- Include the header that defines the needed functions. #include <vpi/algo/MinMaxLoc.h>Declares functions to perform minimum and maximum location finding in images.
- Define the input image object. VPIImage input = /*...*/;
- Create the payload that will contain all temporary buffers needed for processing. Payload creation requires input's dimensions and format. VPIImageFormat format;vpiImageGetFormat(input, &format);int width, height;vpiImageGetSize(input, &width, &height);VPIPayload payload;vpiCreateMinMaxLoc(VPI_BACKEND_CPU, width, height, format, &payload);VPIStatus vpiImageGetFormat(VPIImage img, VPIImageFormat *format)Get the image format.VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)Get the image size in pixels.VPIStatus vpiCreateMinMaxLoc(uint32_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat imageFormat, VPIPayload *payload)Creates payload for vpiSubmitMinMaxLoc.
- Create the output arrays for coordinates with minimum and maximum values. In this example, their capacity it set to 10,000, which limits the number of locations to be found. VPIArray minCoords;vpiArrayCreate(10000, VPI_ARRAY_TYPE_KEYPOINT, 0, &minCoords);VPIArray maxCoords;vpiArrayCreate(10000, VPI_ARRAY_TYPE_KEYPOINT, 0, &maxCoords);VPIStatus vpiArrayCreate(int32_t capacity, VPIArrayType type, uint32_t flags, VPIArray *array)Create an empty array instance.
- Create the stream where the algorithm will be submitted for execution. VPIStream stream;vpiStreamCreate(0, &stream);VPIStatus vpiStreamCreate(uint32_t flags, VPIStream *stream)Create a stream instance.
- Include the header that defines the needed functions.
- Processing phase
- Submit the algorithm to the stream, passing the input image and output arrays. In this example, it will be executed by the CPU backend. vpiSubmitMinMaxLoc(stream, VPI_BACKEND_CPU, payload, input, minCoords, maxCoords);VPIStatus vpiSubmitMinMaxLoc(VPIStream stream, uint32_t backend, VPIPayload payload, VPIImage input, VPIArray minCoords, VPIArray maxCoords)Finds minimum and maximum value locations in an image.
- Optionally, retrieve the minimum and maximum values.
- Synchronize the stream to make sure the operation is completed vpiStreamSync(stream);VPIStatus vpiStreamSync(VPIStream stream)Blocks the calling thread until all submitted commands in this stream queue are done (queue is empty)...
- Lock the input image and the minimum/maximum output arrays. VPIImageData inputImageData;vpiImageLock(input, VPI_LOCK_READ, &inputImageData);VPIArrayData minCoordsData, maxCoordsData;vpiArrayLock(minCoords, VPI_LOCK_READ, &minCoordsData);vpiArrayLock(maxCoords, VPI_LOCK_READ, &maxCoordsData);VPIStatus vpiArrayLock(VPIArray array, VPILockMode mode, VPIArrayData *arrayData)Acquires the lock on array object and returns a pointer to array data.VPIStatus vpiImageLock(VPIImage img, VPILockMode mode, VPIImageData *hostData)Acquires the lock on an image object and returns a pointer to the image planes.
- Retrieve the coordinates of the first minimum and maximum found.
- Use these coordinates as a 2D index to the input image contents to retrieve the minimum/maximum pixel value. Here it's assumed that the input image format is VPI_IMAGE_FORMAT_U8. Different indexing must be employed for other formats. // Assuming that the input image is grayscale (only one plane).assert(inputImageData.numPlanes == 1);// Assuming that the plane has 8-bit unsigned int type.typedef unsigned char Pixel;typedef unsigned char Byte;const Pixel *min_row = (const Pixel *)((const Byte *)imgData + min_i * imgPitchBytes);const Pixel *max_row = (const Pixel *)((const Byte *)imgData + max_i * imgPitchBytes);unsigned char min_value = min_row[min_j];unsigned char max_value = max_row[max_j];int32_t pitchBytesDifference in bytes of beginning of one row and the beginning of the previous.Definition: Image.h:139
- Since the image and array contents aren't needed anymore, they must be unlocked.
- Synchronize the stream to make sure the operation is completed
- Submit the algorithm to the stream, passing the input image and output arrays. In this example, it will be executed by the CPU backend.
- Cleanup phase
- Free resources held by the stream, the payload and the input image and output arrays. vpiStreamDestroy(stream);vpiPayloadDestroy(payload);vpiImageDestroy(input);vpiArrayDestroy(minCoords);vpiArrayDestroy(maxCoords);void vpiPayloadDestroy(VPIPayload payload)Deallocates the payload object and all associated resources.void vpiStreamDestroy(VPIStream stream)Destroy a stream instance and deallocate all HW resources.
- Free resources held by the stream, the payload and the input image and output arrays.
For more information, see MinMaxLoc in the "API Reference" section of VPI - Vision Programming Interface.
Limitations and constraints
CPU and CUDA backends
- The following input image formats are accepted:
Other backends
- Not implemented.
Performance
For information on how to use the performance table below, see Algorithm Performance Tables.
Before comparing measurements, consult Comparing Algorithm Elapsed Times.
For further information on how performance was benchmarked, see Performance Benchmark.