Stereo Disparity
Overview
The Stereo Disparity application receives left and right stereo pair images and returns the disparity between them, which is a function of image depth. The result is saved as an image file to disk. If available, it'll also output the corresponding confidence map.
Instructions
The command line parameters are:
<backend> <left image> <right image>
where
- backend: either cpu, cuda, pva, ofa, ofa-pva-vic or pva-nvenc-vic; it defines the backend that will perform the processing. pva-nvenc-vic, ofa-pva-vic and cuda allow output of the confidence map in addition to the disparity.
- left image: left input image of a rectified stereo pair, it accepts png, jpeg and possibly others.
- right image: right input image of a stereo pair.
Here's one example:
- C++ ./vpi_sample_02_stereo_disparity cuda ../assets/chair_stereo_left.png ../assets/chair_stereo_right.png
- Python python3 main.py cuda ../assets/chair_stereo_left.png ../assets/chair_stereo_right.png
This is using the CUDA backend and the provided sample images. You can try with other stereo pair images, respecting the constraints imposed by the algorithm.
Results
| Left input image | Right input image |
|---|---|
 |  |
| Stereo disparity | Confidence map |
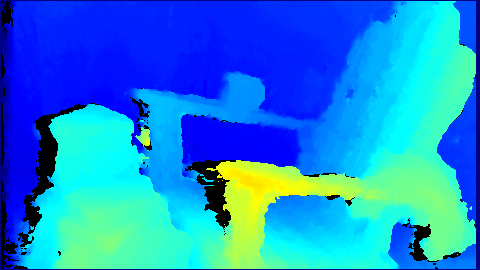 | 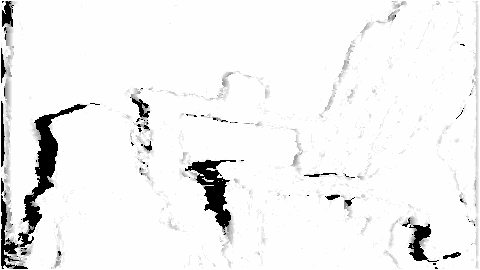 |
Source Code
For convenience, here's the code that is also installed in the samples directory.
Language: 113 confidenceMap = vpi.Image((left.size[0] // downscale, left.size[1] // downscale), vpi.Format.U16)
123 disparity = vpi.stereodisp(left, right, downscale = downscale, out_confmap=confidenceMap, window=5, maxdisp=maxDisparity)
165 // Set algorithm parameters to be used. Only values what differs from defaults will be overwritten.
181 // Input and output width and height has to be 1920x1080 in block-linear format for pva-nvenc-vic pipeline
208 // Output width including downscaleFactor must be at least max(64, maxDisparity/downscaleFactor) when OFA+PVA+VIC are used
211 int downscaledWidth = (inputWidth + stereoParams.downscaleFactor - 1) / stereoParams.downscaleFactor;
212 int minWidth = std::max(stereoParams.maxDisparity / stereoParams.downscaleFactor, downscaledWidth);
233 // Payload is created before the image objects so that non-supported backends can be trapped with an error.
234 CHECK_STATUS(vpiCreateStereoDisparityEstimator(backends, stereoWidth, stereoHeight, stereoFormat, &stereoParams,
254 CHECK_STATUS(vpiImageCreate(outputWidth, outputHeight, VPI_IMAGE_FORMAT_U16, 0, &confidenceMap));
265 CHECK_STATUS(vpiImageCreate(outputWidth, outputHeight, VPI_IMAGE_FORMAT_U16, 0, &confidenceMap));
284 if (strBackend == "pva-nvenc-vic" || strBackend == "pva" || strBackend == "ofa" || strBackend == "ofa-pva-vic")
287 CHECK_STATUS(vpiSubmitConvertImageFormat(stream, VPI_BACKEND_CUDA, inLeft, tmpLeft, &convParams));
288 CHECK_STATUS(vpiSubmitConvertImageFormat(stream, VPI_BACKEND_CUDA, inRight, tmpRight, &convParams));
292 vpiSubmitRescale(stream, VPI_BACKEND_VIC, tmpLeft, stereoLeft, VPI_INTERP_LINEAR, VPI_BORDER_CLAMP, 0));
293 CHECK_STATUS(vpiSubmitRescale(stream, VPI_BACKEND_VIC, tmpRight, stereoRight, VPI_INTERP_LINEAR,
299 CHECK_STATUS(vpiSubmitConvertImageFormat(stream, VPI_BACKEND_CUDA, inLeft, stereoLeft, &convParams));
300 CHECK_STATUS(vpiSubmitConvertImageFormat(stream, VPI_BACKEND_CUDA, inRight, stereoRight, &convParams));
307 CHECK_STATUS(vpiSubmitStereoDisparityEstimator(stream, backends, stereo, stereoLeft, stereoRight, disparity,
317 CHECK_STATUS(vpiImageLockData(disparity, VPI_LOCK_READ, VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR, &data));
342 CHECK_STATUS(vpiImageLockData(confidenceMap, VPI_LOCK_READ, VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR, &data));
Declares functions that handle image format conversion.
#define VPI_IMAGE_FORMAT_S16_BL
Single plane with one block-linear 16-bit signed integer channel.
Definition: ImageFormat.h:121
#define VPI_IMAGE_FORMAT_U16
Single plane with one 16-bit unsigned integer channel.
Definition: ImageFormat.h:109
#define VPI_IMAGE_FORMAT_S16
Single plane with one 16-bit signed integer channel.
Definition: ImageFormat.h:118
#define VPI_IMAGE_FORMAT_Y16_ER_BL
Single plane with one block-linear 16-bit unsigned integer channel with full-range luma (grayscale) i...
Definition: ImageFormat.h:176
#define VPI_IMAGE_FORMAT_Y16_ER
Single plane with one pitch-linear 16-bit unsigned integer channel with full-range luma (grayscale) i...
Definition: ImageFormat.h:171
Functions and structures for dealing with VPI images.
Functions for handling OpenCV interoperability with VPI.
Declares functions that implement the Rescale algorithm.
Declaration of VPI status codes handling functions.
Declares functions that implement stereo disparity estimation algorithms.
Declares functions dealing with VPI streams.
VPIStatus vpiInitConvertImageFormatParams(VPIConvertImageFormatParams *params)
Initialize VPIConvertImageFormatParams with default values.
VPIStatus vpiSubmitConvertImageFormat(VPIStream stream, uint64_t backend, VPIImage input, VPIImage output, const VPIConvertImageFormatParams *params)
Converts the image contents to the desired format, with optional scaling and offset.
Parameters for customizing image format conversion.
Definition: ConvertImageFormat.h:86
VPIStatus vpiImageLockData(VPIImage img, VPILockMode mode, VPIImageBufferType bufType, VPIImageData *data)
Acquires the lock on an image object and returns the image contents.
VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)
Create an empty image instance with the specified flags.
@ VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR
Host-accessible with planes in pitch-linear memory layout.
Definition: Image.h:172
VPIStatus vpiImageCreateWrapperOpenCVMat(const cv::Mat &mat, VPIImageFormat fmt, uint64_t flags, VPIImage *img)
Wraps a cv::Mat in an VPIImage with the given image format.
Definition: OpenCVInterop.hpp:117
VPIStatus vpiImageDataExportOpenCVMat(const VPIImageData &imgData, cv::Mat *mat)
Fills an existing cv::Mat with data from VPIImageData coming from a locked VPIImage.
Definition: OpenCVInterop.hpp:346
void vpiPayloadDestroy(VPIPayload payload)
Deallocates the payload object and all associated resources.
VPIStatus vpiSubmitRescale(VPIStream stream, uint64_t backend, VPIImage input, VPIImage output, VPIInterpolationType interpolationType, VPIBorderExtension border, uint64_t flags)
Changes the size and scale of a 2D image.
int32_t downscaleFactor
Output's downscale factor with respect to the input's resolution.
Definition: StereoDisparity.h:99
VPIStatus vpiInitStereoDisparityEstimatorCreationParams(VPIStereoDisparityEstimatorCreationParams *params)
Initializes VPIStereoDisparityEstimatorCreationParams with default values.
VPIStatus vpiCreateStereoDisparityEstimator(uint64_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat inputFormat, const VPIStereoDisparityEstimatorCreationParams *params, VPIPayload *payload)
Creates payload for vpiSubmitStereoDisparityEstimator.
VPIStatus vpiSubmitStereoDisparityEstimator(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage left, VPIImage right, VPIImage disparity, VPIImage confidenceMap, const VPIStereoDisparityEstimatorParams *params)
Runs stereo processing on a pair of images and outputs a disparity map.
Structure that defines the parameters for vpiCreateStereoDisparityEstimator.
Definition: StereoDisparity.h:83
VPIStatus vpiStreamSync(VPIStream stream)
Blocks the calling thread until all submitted commands in this stream queue are done (queue is empty)...
void vpiStreamDestroy(VPIStream stream)
Destroy a stream instance and deallocate all HW resources.
VPIStatus vpiStreamCreate(uint64_t flags, VPIStream *stream)
Create a stream instance.