Abstract
This NVIDIA Collective Communication Library (NCCL) Developer Guide 2.3.4 provides a detailed discussion of the NCCL programming model, creating collective communications and working with operations.
For previously released NCCL developer documentation, see NCCL Archives.
1. Overview
The NVIDIA® Collective Communications Library ™ (NCCL) (pronounced “Nickel”) is a library of multi-GPU collective communication primitives that are topology-aware and can be easily integrated into applications.
- AllReduce
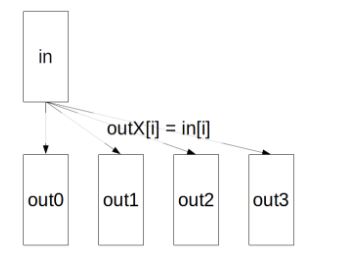
- Broadcast
- Reduce
- AllGather
- ReduceScatter
Tight synchronization between communicating processors is a key aspect of collective communication. CUDA® based collectives would traditionally be realized through a combination of CUDA memory copy operations and CUDA kernels for local reductions. NCCL, on the other hand, implements each collective in a single kernel handling both communication and computation operations. This allows for fast synchronization and minimizes the resources needed to reach peak bandwidth.
NCCL conveniently removes the need for developers to optimize their applications for specific machines. NCCL provides fast collectives over multiple GPUs both within and across nodes. It supports a variety of interconnect technologies including PCIe, NVLink™ , InfiniBand Verbs, and IP sockets. NCCL also automatically patterns its communication strategy to match the system’s underlying GPU interconnect topology.
- single-threaded
- multi-threaded, for example, using one thread per GPU
- multi-process, for example, MPI combined with multi-threaded operation on GPUs
NCCL has found great application in deep learning frameworks, where the AllReduce collective is heavily used for neural network training. Efficient scaling of neural network training is possible with the multi-GPU and multi node communication provided by NCCL.
2. Collective Communication Primitives
Collective communication primitives are common patterns of data transfer among a group of CUDA devices. A communication algorithm involves many processors that are communicating together.
Each NCCL processor (GPU) is identified within the communication group by zero-based index or rank . Each rank uses a communicator object to refer to the collection of GPUs that are intended to work together for some task.
The creation of a communicator is the first step needed before launching any communication operation.
2.1. Creating A Communicator
When creating a communicator, a unique rank between 0 and n-1 has to be assigned to each of the nCUDA devices which are part of the communicator. Using the same CUDA device multiple times as different ranks of the same NCCL communicator is not supported and may lead to hangs.
The ncclGetUniqueId function returns an ID which has to be broadcast to all participating threads and processes using any CPU communication system, for example, passing the ID pointer to multiple threads, or broadcasting it to other processes using MPI or another parallel environment using, for example, sockets.
You can also call the ncclCommInitAll function to create n communicator objects at once within a single process. As it is limited to a single process, this function does not permit inter-node communication. ncclCommInitAll is equivalent to calling a combination of ncclGetUniqueId and ncclCommInitRank.
ncclResult_t ncclCommInitAll(ncclComm_t* comm, int ndev, const int* devlist) {
ncclUniqueId Id;
ncclGetUniqueId(&Id);
ncclGroupStart();
for (int i=0; i<ndev; i++) {
cudaSetDevice(devlist[i]);
ncclCommInitRank(comm+i, ndev, Id, i);
}
ncclGroupEnd();
}2.2. Operations
Like MPI collective operations, NCCL collective operations have to be called for each rank (hence CUDA device) to form a complete collective operation. Failure to do so will result in other ranks waiting indefinitely.
2.2.1. AllReduce
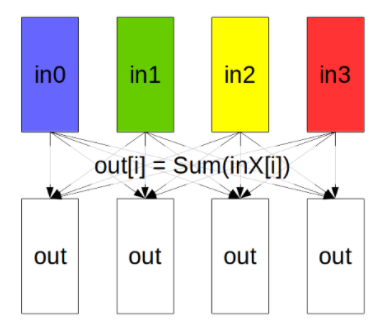
The AllReduce operation is performing reductions on data, for example, sum and max, across devices and writing the result in the receive buffers of every rank.
The AllReduce operation is rank-agnostic. Any reordering of the ranks will not affect the outcome of the operations.
AllReduce starts with independent arrays Vk of N values on each of K ranks and ends with identical arrays S of N values, where S[i] = V0 [i]+V1 [i]+…+Vk-1 [i], for each rank k .
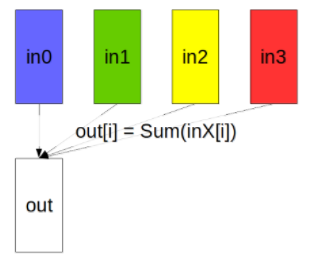
2.2.3. Reduce
The Reduce operation is performing the same operation as AllReduce, but writes the result only in the receive buffers of a specified root rank.
2.2.4. AllGather
In the AllGather operation, each of the K processors aggregates N values from every processor into an output of dimension K*N. The output is ordered by rank index.
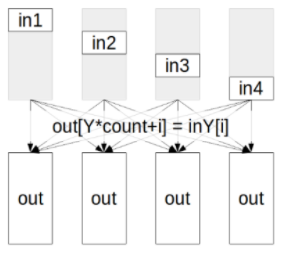
The AllGather operation is impacted by a different rank or device mapping since the ranks determine the data layout.
2.2.5. ReduceScatter
The ReduceScatter operation performs the same operation as the Reduce operation, except the result is scattered in equal blocks among ranks, each rank getting a chunk of data based on its rank index.
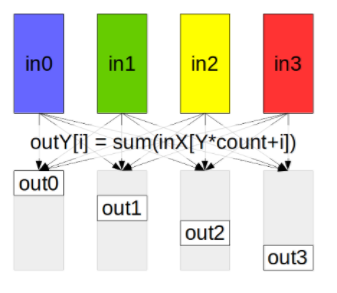
The ReduceScatter operation is impacted by a different rank or device mapping since the ranks determine the data layout.
2.3. Data Pointers
- device memory local to the CUDA device
- host memory registered using CUDA SDK APIs cudaHostRegister or cudaGetDevicePointer
- managed and unified memory
The only exception is device memory located on another device but accessible from the current device using peer access. NCCL will return an error in that case to avoid programming errors (only when NCCL_CHECK_POINTERS=1 since 2.2.12).
2.4. CUDA Stream Semantics
NCCL calls are associated to a stream and are passed as the last argument of the collective communication function. The NCCL call returns when the operation has been effectively enqueued to the given stream, or returns an error. The collective operation is then executed asynchronously on the CUDA device. The operation status can be queried using standard CUDA semantics, for example, calling cudaStreamSynchronize or using CUDA events.
2.5. Group Calls
2.5.1. Management Of Multiple GPUs From One Thread
When a single thread is managing multiple devices, group semantics must be used. This is because every NCCL call may have to block, waiting for other threads or ranks to arrive, before effectively posting the NCCL operation on the given stream.
for (int i=0; i<nLocalDevs; i++) {
ncclAllReduce(..., comm[i], stream[i];
} ncclGroupStart();
for (int i=0; i<nLocalDevs; i++) {
ncclAllReduce(..., comm[i], stream[i];
}
ncclGroupEnd();
This
will tell NCCL to treat all calls between ncclGroupStart and
ncclGroupEnd as a single call to many devices.
Contrary to NCCL 1.x, there is no need to set the CUDA device before every NCCL communication call within a group, but it is still needed when calling ncclCommInitRank within a group.
2.5.2. Aggregated Operations (NCCL 2.2 and later)
The group semantics can also be used to have multiple collective operations performed within a single NCCL launch. This is useful for reducing the launch overhead, in other words, latency, as it only occurs once for multiple operations.
2.5.2.1. Usage
Aggregation of collective operations can be done simply by having multiple calls to NCCL within a ncclGroupStart / ncclGroupEnd section.
ncclGroupStart(); ncclBroadcast(sendbuff1, recvbuff1, count1, datatype, root, comm, stream); ncclAllReduce(sendbuff2, recvbuff2, count2, datatype, comm, stream); ncclAllReduce(sendbuff3, recvbuff3, count3, datatype, comm, stream); ncclGroupEnd();
ncclGroupStart(); ncclAllReduce(sendbuff1, recvbuff1, count1, comm, stream1); ncclAllReduce(sendbuff2, recvbuff2, count2, comm, stream2); ncclGroupEnd();
ncclGroupStart();
for (int i=0; i<nlayers; i++) {
ncclGroupStart();
for (int g=0; g<ngpus; g++) {
ncclAllReduce(sendbuffs[g]+offsets[i], recvbuffs[g]+offsets[i], counts[i], datatype[i], comms[g], streams[g]);
}
ncclGroupEnd();
}
ncclGroupEnd();2.6. Thread Safety
NCCL primitives are generally not thread-safe, however, they are re-entrant. Multiple threads should use separate communicator objects.
2.7. In-Place Operations
Contrary to MPI, NCCL does not define a special "in-place" value to replace pointers. Instead, NCCL optimizes the case where the provided pointers are effectively "in place".
For ncclBroadcast and ncclAllreduce functions, this means that passing sendBuff == recvBuff will perform in place operations, storing final results at the same place as initial data was read from.
ncclReduceScatter(data, data+rank*recvcount, recvcount, datatype, op, comm, stream); ncclAllGather(data+rank*sendcount, data, sendcount, datatype, op, comm, stream);
3. Examples
- using multiple GPUs per thread/process
- using multiple threads
- using multiple processes - the examples with multiple processes use MPI as parallel runtime environment, but any multi-process system should be able to work similarly.
Ensure that you always check the return codes from the NCCL functions. For clarity, the following examples do not contain error checking.
3.1. Communicator Creation And Destruction Examples
The following examples demonstrate common use cases for NCCL initialization.
3.1.1. Example 1: Single Process, Single Thread, Multiple Devices
ncclComm_t comms[4];
int devs[4] = { 0, 1, 2, 3 };
ncclCommInitAll(comms, 4, devs);Next, you can call NCCL collective operations using a single thread, and group calls, or multiple threads, each provided with a comm object.
for (int i=0; i<4; i++) ncclCommDestroy(comms[i]);
#include <stdio.h>
#include "cuda_runtime.h"
#include "nccl.h"
#define CUDACHECK(cmd) do { \
cudaError_t e = cmd; \
if( e != cudaSuccess ) { \
printf("Failed: Cuda error %s:%d '%s'\n", \
__FILE__,__LINE__,cudaGetErrorString(e)); \
exit(EXIT_FAILURE); \
} \
} while(0)
#define NCCLCHECK(cmd) do { \
ncclResult_t r = cmd; \
if (r!= ncclSuccess) { \
printf("Failed, NCCL error %s:%d '%s'\n", \
__FILE__,__LINE__,ncclGetErrorString(r)); \
exit(EXIT_FAILURE); \
} \
} while(0)
int main(int argc, char* argv[])
{
ncclComm_t comms[4];
//managing 4 devices
int nDev = 4;
int size = 32*1024*1024;
int devs[4] = { 0, 1, 2, 3 };
//allocating and initializing device buffers
float** sendbuff = (float**)malloc(nDev * sizeof(float*));
float** recvbuff = (float**)malloc(nDev * sizeof(float*));
cudaStream_t* s = (cudaStream_t*)malloc(sizeof(cudaStream_t)*nDev);
for (int i = 0; i < nDev; ++i) {
CUDACHECK(cudaSetDevice(i));
CUDACHECK(cudaMalloc(sendbuff + i, size * sizeof(float)));
CUDACHECK(cudaMalloc(recvbuff + i, size * sizeof(float)));
CUDACHECK(cudaMemset(sendbuff[i], 1, size * sizeof(float)));
CUDACHECK(cudaMemset(recvbuff[i], 0, size * sizeof(float)));
CUDACHECK(cudaStreamCreate(s+i));
}
//initializing NCCL
NCCLCHECK(ncclCommInitAll(comms, nDev, devs));
//calling NCCL communication API. Group API is required when using
//multiple devices per thread
NCCLCHECK(ncclGroupStart());
for (int i = 0; i < nDev; ++i)
NCCLCHECK(ncclAllReduce((const void*)sendbuff[i], (void*)recvbuff[i], size, ncclFloat, ncclSum,
comms[i], s[i]));
NCCLCHECK(ncclGroupEnd());
//synchronizing on CUDA streams to wait for completion of NCCL operation
for (int i = 0; i < nDev; ++i) {
CUDACHECK(cudaSetDevice(i));
CUDACHECK(cudaStreamSynchronize(s[i]));
}
//free device buffers
for (int i = 0; i < nDev; ++i) {
CUDACHECK(cudaSetDevice(i));
CUDACHECK(cudaFree(sendbuff[i]));
CUDACHECK(cudaFree(recvbuff[i]));
}
//finalizing NCCL
for(int i = 0; i < nDev; ++i)
ncclCommDestroy(comms[i]);
printf("Success \n");
return 0;
}3.1.2. Example 2: One Device Per Process Or Thread
When one thread or process is affected to each thread, ncclCommInitRank can be used as a collective call to create a communicator. Each thread or process will get its own object.
The following code is an example of a communicator creation in the context of MPI, using one device per MPI rank.
int myRank, nRanks; MPI_Comm_rank(MPI_COMM_WORLD, &myRank); MPI_Comm_size(MPI_COMM_WORLD, &nRanks);
ncclUniqueId id; if (myRank == 0) ncclGetUniqueId(&id); MPI_Bcast(id, sizeof(id), MPI_BYTE, 0, 0, MPI_COMM_WORLD);
ncclComm_t comm; ncclCommInitRank(&comm, nRanks, id, myRank);
We can now call the NCCL collective operations using the communicator.
ncclCommDestroy(comm);
#include <stdio.h>
#include "cuda_runtime.h"
#include "nccl.h"
#include "mpi.h"
#include <unistd.h>
#include <stdint.h>
#define MPICHECK(cmd) do { \
int e = cmd; \
if( e != MPI_SUCCESS ) { \
printf("Failed: MPI error %s:%d '%d'\n", \
__FILE__,__LINE__, e); \
exit(EXIT_FAILURE); \
} \
} while(0)
#define CUDACHECK(cmd) do { \
cudaError_t e = cmd; \
if( e != cudaSuccess ) { \
printf("Failed: Cuda error %s:%d '%s'\n", \
__FILE__,__LINE__,cudaGetErrorString(e)); \
exit(EXIT_FAILURE); \
} \
} while(0)
#define NCCLCHECK(cmd) do { \
ncclResult_t r = cmd; \
if (r!= ncclSuccess) { \
printf("Failed, NCCL error %s:%d '%s'\n", \
__FILE__,__LINE__,ncclGetErrorString(r)); \
exit(EXIT_FAILURE); \
} \
} while(0)
static uint64_t getHostHash(const char* string) {
// Based on DJB2, result = result * 33 + char
uint64_t result = 5381;
for (int c = 0; string[c] != '\0'; c++){
result = ((result << 5) + result) + string[c];
}
return result;
}
static void getHostName(char* hostname, int maxlen) {
gethostname(hostname, maxlen);
for (int i=0; i< maxlen; i++) {
if (hostname[i] == '.') {
hostname[i] = '\0';
return;
}
}
}
int main(int argc, char* argv[])
{
int size = 32*1024*1024;
int myRank, nRanks, localRank = 0;
//initializing MPI
MPICHECK(MPI_Init(&argc, &argv));
MPICHECK(MPI_Comm_rank(MPI_COMM_WORLD, &myRank));
MPICHECK(MPI_Comm_size(MPI_COMM_WORLD, &nRanks));
//calculating localRank based on hostname which is used in selecting a GPU
uint64_t hostHashs[nRanks];
char hostname[1024];
getHostName(hostname, 1024);
hostHashs[myRank] = getHostHash(hostname);
MPICHECK(MPI_Allgather(MPI_IN_PLACE, 0, MPI_DATATYPE_NULL, hostHashs, sizeof(uint64_t), MPI_BYTE, MPI_COMM_WORLD));
for (int p=0; p<nRanks; p++) {
if (p == myRank) break;
if (hostHashs[p] == hostHashs[myRank]) localRank++;
}
ncclUniqueId id;
ncclComm_t comm;
float *sendbuff, *recvbuff;
cudaStream_t s;
//get NCCL unique ID at rank 0 and broadcast it to all others
if (myRank == 0) ncclGetUniqueId(&id);
MPICHECK(MPI_Bcast((void *)&id, sizeof(id), MPI_BYTE, 0, MPI_COMM_WORLD));
//picking a GPU based on localRank, allocate device buffers
CUDACHECK(cudaSetDevice(localRank));
CUDACHECK(cudaMalloc(&sendbuff, size * sizeof(float)));
CUDACHECK(cudaMalloc(&recvbuff, size * sizeof(float)));
CUDACHECK(cudaStreamCreate(&s));
//initializing NCCL
NCCLCHECK(ncclCommInitRank(&comm, nRanks, id, myRank));
//communicating using NCCL
NCCLCHECK(ncclAllReduce((const void*)sendbuff, (void*)recvbuff, size, ncclFloat, ncclSum,
comm, s));
//completing NCCL operation by synchronizing on the CUDA stream
CUDACHECK(cudaStreamSynchronize(s));
//free device buffers
CUDACHECK(cudaFree(sendbuff));
CUDACHECK(cudaFree(recvbuff));
//finalizing NCCL
ncclCommDestroy(comm);
//finalizing MPI
MPICHECK(MPI_Finalize());
printf("[MPI Rank %d] Success \n", myRank);
return 0;
}3.1.3. Example 3: Multiple Devices Per Thread
You can combine both multiple process or threads and multiple device per process or thread. In this case, we need to use group semantics.
The following example combines MPI and multiple devices per process (=MPI rank).
int myRank, nRanks; MPI_Comm_rank(MPI_COMM_WORLD, &myRank); MPI_Comm_size(MPI_COMM_WORLD, &nRanks);
ncclUniqueId id; if (myRank == 0) ncclGetUniqueId(&id); MPI_Bcast(id, sizeof(id), MPI_BYTE, 0, 0, MPI_COMM_WORLD);
ncclComm_t comms[ngpus];
ncclGroupStart();
for (int i=0; i<ngpus; i++) {
cudaSetDevice(devs[i]);
ncclCommInitRank(comms+i, ngpus*nRanks, id, myRank*ngpus+i);
}
ncclGroupEnd();Next, we call NCCL collective operations using a single thread, and group calls, or multiple threads, each provided with a comm object.
for (int i=0; i<ngpus; i++) ncclCommDestroy(comms[i]);
#include <stdio.h>
#include "cuda_runtime.h"
#include "nccl.h"
#include "mpi.h"
#include <unistd.h>
#include <stdint.h>
#define MPICHECK(cmd) do { \
int e = cmd; \
if( e != MPI_SUCCESS ) { \
printf("Failed: MPI error %s:%d '%d'\n", \
__FILE__,__LINE__, e); \
exit(EXIT_FAILURE); \
} \
} while(0)
#define CUDACHECK(cmd) do { \
cudaError_t e = cmd; \
if( e != cudaSuccess ) { \
printf("Failed: Cuda error %s:%d '%s'\n", \
__FILE__,__LINE__,cudaGetErrorString(e)); \
exit(EXIT_FAILURE); \
} \
} while(0)
#define NCCLCHECK(cmd) do { \
ncclResult_t r = cmd; \
if (r!= ncclSuccess) { \
printf("Failed, NCCL error %s:%d '%s'\n", \
__FILE__,__LINE__,ncclGetErrorString(r)); \
exit(EXIT_FAILURE); \
} \
} while(0)
static uint64_t getHostHash(const char* string) {
// Based on DJB2, result = result * 33 + char
uint64_t result = 5381;
for (int c = 0; string[c] != '\0'; c++){
result = ((result << 5) + result) + string[c];
}
return result;
}
static void getHostName(char* hostname, int maxlen) {
gethostname(hostname, maxlen);
for (int i=0; i< maxlen; i++) {
if (hostname[i] == '.') {
hostname[i] = '\0';
return;
}
}
}
int main(int argc, char* argv[])
{
int size = 32*1024*1024;
int myRank, nRanks, localRank = 0;
//initializing MPI
MPICHECK(MPI_Init(&argc, &argv));
MPICHECK(MPI_Comm_rank(MPI_COMM_WORLD, &myRank));
MPICHECK(MPI_Comm_size(MPI_COMM_WORLD, &nRanks));
//calculating localRank which is used in selecting a GPU
uint64_t hostHashs[nRanks];
char hostname[1024];
getHostName(hostname, 1024);
hostHashs[myRank] = getHostHash(hostname);
MPICHECK(MPI_Allgather(MPI_IN_PLACE, 0, MPI_DATATYPE_NULL, hostHashs, sizeof(uint64_t), MPI_BYTE, MPI_COMM_WORLD));
for (int p=0; p<nRanks; p++) {
if (p == myRank) break;
if (hostHashs[p] == hostHashs[myRank]) localRank++;
}
//each process is using two GPUs
int nDev = 2;
float** sendbuff = (float**)malloc(nDev * sizeof(float*));
float** recvbuff = (float**)malloc(nDev * sizeof(float*));
cudaStream_t* s = (cudaStream_t*)malloc(sizeof(cudaStream_t)*nDev);
//picking GPUs based on localRank
for (int i = 0; i < nDev; ++i) {
CUDACHECK(cudaSetDevice(localRank*nDev + i));
CUDACHECK(cudaMalloc(sendbuff + i, size * sizeof(float)));
CUDACHECK(cudaMalloc(recvbuff + i, size * sizeof(float)));
CUDACHECK(cudaMemset(sendbuff[i], 1, size * sizeof(float)));
CUDACHECK(cudaMemset(recvbuff[i], 0, size * sizeof(float)));
CUDACHECK(cudaStreamCreate(s+i));
}
ncclUniqueId id;
ncclComm_t comms[nDev];
//generating NCCL unique ID at one process and broadcasting it to all
if (myRank == 0) ncclGetUniqueId(&id);
MPICHECK(MPI_Bcast((void *)&id, sizeof(id), MPI_BYTE, 0, MPI_COMM_WORLD));
//initializing NCCL, group API is required around ncclCommInitRank as it is
//called across multiple GPUs in each thread/process
NCCLCHECK(ncclGroupStart());
for (int i=0; i<nDev; i++) {
CUDACHECK(cudaSetDevice(localRank*nDev + i));
NCCLCHECK(ncclCommInitRank(comms+i, nRanks*nDev, id, myRank*nDev + i));
}
NCCLCHECK(ncclGroupEnd());
//calling NCCL communication API. Group API is required when using
//multiple devices per thread/process
NCCLCHECK(ncclGroupStart());
for (int i=0; i<nDev; i++)
NCCLCHECK(ncclAllReduce((const void*)sendbuff[i], (void*)recvbuff[i], size, ncclFloat, ncclSum,
comms[i], s[i]));
NCCLCHECK(ncclGroupEnd());
//synchronizing on CUDA stream to complete NCCL communication
for (int i=0; i<nDev; i++)
CUDACHECK(cudaStreamSynchronize(s[i]));
//freeing device memory
for (int i=0; inDev; i++) {
CUDACHECK(cudaFree(sendbuff[i]));
CUDACHECK(cudaFree(recvbuff[i]));
}
//finalizing NCCL
for (int i=0; i<nDev; i++) {
ncclCommDestroy(comms[i]);
}
//finalizing MPI
MPICHECK(MPI_Finalize());
printf("[MPI Rank %d] Success \n", myRank);
return 0;
}
3.2. Communication Examples
The following examples demonstrate common patterns for executing NCCL collectives.
3.2.1. Example 1: One Device Per Process Or Thread
ncclAllReduce(sendbuff, recvbuff, count, datatype, op, comm, stream);
cudaStreamSynchronize(stream);
For a complete working example with MPI and single device per MPI process, see Example 2: One Device per Process or Thread.
3.2.2. Example 2: Multiple Devices Per Thread
ncclGroupStart(); for (int i=0; i<ngpus; i++) ncclAllReduce(sendbuffs[i], recvbuff[i], count, datatype, op, comms[i], streams[i]); ncclGroupEnd();
for (int i=0; i<ngpus; i++) cudaStreamSynchronize(streams[i]);
For a complete working example with MPI and multiple devices per MPI process, see Example 3: Multiple Devices per Thread.
4. NCCL And MPI
4.1. API
- Using multiple devices per process
- Similarly to the concept of MPI endpoints, NCCL does not require ranks to be mapped 1:1 to MPI ranks. A NCCL communicator may have many ranks associated to a single process (hence MPI rank if used with MPI).
- ReduceScatter operation
- The ncclReduceScatter operation is similar to the MPI_Reduce_scatter_block operation, not the MPI_Reduce_scatter operation. The MPI_Reduce_scatter function is intrinsically a "vector" function, while MPI_Reduce_scatter_block (defined later to fill the missing semantics) provides regular counts similarly to the mirror function MPI_Allgather. This is an oddity of MPI which has not been fixed for legitimate retro-compatibility reasons and that NCCL does not follow.
- Send and Receive counts
- In many collective operations, MPI allows for different send and receive
counts and types, as long as sendcount*sizeof(sendtype) ==
recvcount*sizeof(recvtype). NCCL does not
allow that, defining a single count and a single data-type.
For AllGather and ReduceScatter operations, the count is equal to the per-rank size, which is the smallest size; the other count being equal to nranks*count. The function prototype clearly shows which count is provided, for example:
- sendcount for ncclAllgather
- recvcount for ncclReduceScatter
Note: When performing or comparing AllReduce operations using a combination of ReduceScatter and AllGather , define the sendcount and recvcount as the total count divided by the number of ranks, with the correct count rounding-up, if it is not a perfect multiple of the number of ranks. - In-place operations
- For more information, see In-place Operations.
For more information about the NCCL API, see NCCL API Guide.
4.2. Using NCCL Within An MPI Program
NCCL can be easily used in conjunction with MPI. NCCL collectives are similar to MPI collectives, therefore, creating a NCCL communicator out of an MPI communicator is straightforward. It is therefore easy to use MPI for CPU-to-CPU communication and NCCL for GPU-to-GPU communication.
However, some implementation details in MPI can lead to issues when using NCCL inside an MPI program.
4.2.1. MPI Progress
MPI defines a notion of progress which means that MPI operations need the program to call MPI functions (potentially multiple times) to make progress and eventually complete.
In some implementations, progress on one rank may need MPI to be called on another rank. While this is usually bad for performance, it can be argued that this is a valid MPI implementation.
As a result, blocking in a NCCL collective operations, for example calling cudaStreamSynchronize, may create a deadlock in some cases because not calling MPI will not make other ranks progress, hence reach the NCCL call, hence unblock the NCCL operation.
cudaError_t err = cudaErrorNotReady;
int flag;
while (err == cudaErrorNotReady) {
err = cudaStreamQuery(args->streams[i]);
MPI_Iprobe(MPI_ANY_SOURCE, MPI_ANY_TAG, MPI_COMM_WORLD, &flag,
MPI_STATUS_IGNORE);
}4.2.2. Inter-GPU Communication With CUDA-Aware MPI
Using NCCL to perform inter-GPU communication concurrently with CUDA-aware MPI may create deadlocks.
NCCL creates inter-device dependencies, meaning that after it has been launched, a NCCL kernel will wait (and potentially block the CUDA device) until all ranks in the communicator launch their NCCL kernel. CUDA-aware MPI may also create such dependencies between devices depending on the MPI implementation.
Using both MPI and NCCL to perform transfers between the same sets of CUDA devices concurrently is therefore not guaranteed to be safe.
5. Troubleshooting
Ensure you are familiar with the following known issues and useful debugging strategies.
5.1. Errors
- ncclUnhandledCudaError and ncclSystemError indicate that a call to an external library failed.
- ncclInvalidArgument and ncclInvalidUsage indicates there was a programming error in the application using NCCL.
5.2. Networking Issues
5.2.1. IP Network Interfaces
For more information about how to specify which interfaces to use, see NCCL Knobs topic, particularly the NCCL_SOCKET_IFNAME knob.
5.2.2. InfiniBand
5.3. Known Issues
Ensure you are familiar with the following known issues:
Sharing Data
--shm-size=1g --ulimit memlock=-1in the command line to
nvidia-docker run
Concurrency between NCCL and CUDA calls (NCCL up to 2.0.5 or CUDA 8)
NCCL uses CUDA kernels to perform inter-GPU communication. The NCCL kernels synchronize with each other, therefore, each kernel requires other kernels on other GPUs to be also executed in order to complete. The application should therefore make sure that nothing prevents the NCCL kernels from being executed concurrently on the different devices of a NCCL communicator.
For example, let's say you have a process managing multiple CUDA devices, and, also features a thread which calls CUDA functions asynchronously. In this case, CUDA calls could be executed between the enqueuing of two NCCL kernels. The CUDA call may wait for the first NCCL kernel to complete and prevent the second one from being launched, causing a deadlock since the first kernel will not complete until the second one is executed. To avoid this issue, one solution is to have a lock around the NCCL launch on multiple devices (around ncclGroupStart and ncclGroupEnd when using a single thread, around the NCCL launch when using multiple threads, using thread synchronization if necessary) and take this lock when calling CUDA from the asynchronous thread.
Starting with NCCL 2.1.0, this issue is no longer present when using CUDA 9, unless Cooperative Group Launch is disabled in the NCCL_LAUNCH_MODE=PARALLEL setting.
5.4. NCCL Knobs
| Environment Variable | Description | Values Accepted |
|---|---|---|
| NCCL_P2P_DISABLE | The NCCL_P2P_DISABLE variable disables the P2P transport, which uses CUDA direct access between GPUs, using NVLink or PCI. | Define and set to 1 to disable P2P. |
| NCCL_P2P_LEVEL (since 2.3.4) |
Finely control when to use the P2P transport between GPUs. The level describes the maximum distance between GPUs where we use P2P. | 0 : Never use P2P (always disabled)
1 : Use P2P when GPUs are on the same PCI switch. 2 : Use P2P when GPUs are connected through PCI switches (potentially multiple hops). 3 : Use P2P when GPUs are on the same PCI root complex, potentially going through the CPU. 4 : Use P2P even across PCI root complexes (always enabled). |
| NCCL_SHM_DISABLE | The NCCL_SHM_DISABLE variable disables the
Shared Memory (SHM) transports.
SHM is used between devices when peer-to-peer cannot happen, therefore, host memory is used. NCCL uses network (InfiniBand or IP sockets) to communicate between the CPU sockets when SHM is disabled. |
Define and set to 1 to disable SHM. |
| NCCL_SOCKET_IFNAME | The NCCL_SOCKET_IFNAME variable specifies which IP interface to use for communication. | Define to a list of prefixes to filter interfaces to be used
by NCCL. For example, eth,ib
would only select interfaces starting with eth
or ib.
Using the ^ symbol,
NCCL will exclude interfaces starting
with any prefix in that list. For example,
^eth,ib would select interfaces not
starting with eth or
ib.
Note: The loopback interface
(lo) is disabled by default and
will only be enabled if explicitly
selected.
|
| NCCL_DEBUG | The NCCL_DEBUG variable controls the debug information that is displayed from NCCL. This variable is commonly used for debugging. |
|
| NCCL_BUFFSIZE | The NCCL_BUFFSIZE variable controls the
amount of buffer to share data between two GPUs.
Use this variable if you encounter memory constraint issues when using NCCL or you think that a different buffer size would improve performance. |
Default is 4194304 (4 MB).
Values are integers, in bytes. The recommendation is to use powers of 2. For example, 1024 will give a 1K buffer. |
| NCCL_NTHREADS | The NCCL_NTHREADS variable sets the number
of CUDA threads per CUDA block.
NCCL will launch one block per communication
ring.
Use this variable if you think your GPU clocks are low and you want to increase the number of threads. You can also use this variable to reduce the number of threads to decrease the GPU workload. |
Default is 256.
The values allowed are 64, 128 and 256. |
| NCCL_RINGS | The NCCL_RINGS variable overrides the rings
that NCCL forms by default. Rings are sequences
of ranks. They can be any permutations of ranks.
NCCL filters out any rings that do not contain the number of ranks in the NCCL communicator. In general, the ring formation is dependent on the hardware topology connecting the GPUs in your system. |
Ranks from 0 to n-1, where
n is the number of GPUs in your
communicator.
The ranks can be separated by any non-digit character, for example, " ", "-", except "|". Multiple rings can be specified separated by the pipe character "|". For example, if you have 4 GPUs in a communicator, you can form communication rings as such:0 1 2 3 | 3 2 1 0. This will form two rings, one in each direction. |
| NCCL_MAX_NRINGS (since 2.0.5) |
The NCCL_MAX_NRINGS variable limits the number of rings NCCL can use. Reducing the number of rings also reduces the number of CUDA blocks used for communication, hence the impact on GPU computing resources. | Any value above or equal to 1. |
| NCCL_MIN_NRINGS (since 2.2.0) |
Controls the minimum number of rings you want NCCL to use.
Increasing the number of rings also increases the number of CUDA
blocks NCCL uses, which may be useful to improve performance;
however, it uses more CUDA compute resources.
This is especially useful when using aggregated collectives on platforms where NCCL would usually only create one ring. |
Default is platform dependent. Set to a integer value, up to 12 (before 2.3.4) or 16 (since 2.3.4). |
| NCCL_CHECKS_DISABLE (since 2.0.5) (deprecated in 2.2.12) |
Disable argument checks. Checks are useful during development but can increase the latency. They can be disabled to improve performance in production. | Default is 0. Set the value to 1 to disable checks. |
| NCCL_CHECK_POINTERS (since 2.2.12) |
Enable checking of the CUDA memory pointers on each collective call. Checks are useful during development but can increase the latency. | Default is 0, set to 1 to
enable checking.
Setting to 1 restores the original behavior of NCCL prior to 2.2.12. |
| NCCL_LAUNCH_MODE (since 2.1.0) |
Controls how NCCL launches CUDA kernels. | The default value is to use cooperative groups (CUDA 9 and later) unless running a job with one GPU per process.
Setting it to PARALLEL uses the previous launch system which can be faster, but is prone to deadlocks when running a job with multiple GPUs per process. |
| NCCL_IB_DISABLE | The NCCL_IB_DISABLE variable disables the IB transport that is to be used by NCCL. Instead, NCCL will fallback to using IP sockets. | Define and set to 1 to force IP sockets usage. |
| NCCL_IB_HCA | The NCCL_IB_HCA variable specifies which RDMA interface to use for communication. | Define to a list of prefixes to filter interfaces to be used
by NCCL.
Using the ^ symbol, NCCL will exclude interfaces starting with any prefix in that list of prefix. Specific ports can also be specified using :. Examples:
|
| NCCL_IB_TIMEOUT | The NCCL_IB_TIMEOUT variable controls the
InfiniBand Verbs Timeout. For more information, see InfiniBand.
The timeout is computed as 4.096 µs * 2 ^ timeout, and the right value is dependent on the size of the network. Increasing that value can help on very large networks, for example, if NCCL is failing on a call to ibv_poll_cq with error 12. For more information, see section 12.7.34 of the InfiniBand specification (Local Ack Timeout). |
The default value used by NCCL is
14.
Values can be 1-22. |
| NCCL_IB_RETRY_CNT(since 2.1.15) | Controls the InfiniBand retry count. For more information,
see InfiniBand.
For more information, see section 12.7.38 of the InfiniBand specification. |
Default value is 7. |
| NCCL_IB_GID_INDEX (since 2.1.4) |
Defines the Global ID index used in RoCE mode. See the
show_gids command to set this value. For
more information, see InfiniBand.
For more information, see the InfiniBand specification or vendor documentation. |
Default value is 0. |
| NCCL_IB_SL (since 2.1.4) |
Defines the InfiniBand Service Level. For more information,
see InfiniBand.
For more information, see the InfiniBand specification or vendor documentation. |
Default value is 1. |
| NCCL_IB_TC (since 2.1.15) |
Defines the InfiniBand traffic class field. For more
information, see InfiniBand.
For more information, see the InfiniBand specification or vendor documentation. |
Default value is 0. |
| NCCL_IB_CUDA_SUPPORT | The NCCL_IB_CUDA_SUPPORT variable is used to disable GPU Direct RDMA. | By default, NCCL enables GPU Direct RDMA, if
the topology permits it. This variable can disable this
behavior.
Define and set to 0 to disable GPU Direct RDMA. |
| NCCL_IB_GDR_LEVEL (since 2.3.4) |
Finely control when to use the GPU Direct RDMA between an IB NIC and a GPU. The level describes the maximum distance between the NIC and the GPU. | 0 : Never use GPU Direct RDMA (always disabled)
1 : Use GPU Direct RDMA when GPU and NIC are on the same PCI switch. 2 : Use GPU Direct RDMA when GPU and NIC are connected through PCI switches (potentially multiple hops). 3 : Use GPU Direct RDMA when GPU and NIC are on the same PCI root complex, potentially going through the CPU. 4 : Use GPU Direct RDMA even across PCI root complexes (always enabled). |
| NCCL_NET_GDR_READ | The NCCL_NET_GDR_READ variable enables GPU
Direct RDMA when sending data. By default, NCCL
uses GPU Direct RDMA to receive data directly in GPU memory.
However, when sending data, the data is first stored in CPU
memory, then goes to the InfiniBand card.
Note: Reading directly
GPU memory when sending data is known to be slightly slower
than reading from CPU memory.
|
Default value is 0.
Define and set to 1 to use GPU Direct RDMA to send data to the NIC directly (bypassing CPU). |
| NCCL_SINGLE_RING_THRESHOLD (since 2.1.0) |
Set the limit under which NCCL will only use one ring. This will limit bandwidth but improve latency. | Default value is 256kB on GPUs with compute capability 7 and
above. Otherwise, the default value is 128kB on others.
Values are integers, in bytes. |
| NCCL_LL_THRESHOLD (since 2.1.0) |
Set the size limit under which NCCL uses low-latency algorithms. | Default is 16kB.
Values are integers, in bytes. |
| NCCL_DEBUG_FILE (since 2.2.12) |
Direct the NCCL debug logging output to a file. The filename format can be set to filename.%h.%p where %h is the hostname and %p is the process PID. | The default output file is stdout unless
this env variable is set.
Setting
NCCL_DEBUG_FILE will cause NCCL to
create and overwrite any previous files of that name.
Note: If the filename is not unique across all the job
processes, then the output may be lost or
corrupted.
|
| NCCL_DEBUG_SUBSYS (since 2.3.4) |
Filter the NCCL_DEBUG=INFO output based on subsystem. A comma separated list of the subsystems to include in the NCCL debug
log traces.
Prefixing the subsystem name with ‘^’ will disable the logging for that subsystem. |
The default value is INIT.
Supported subsystem names are INIT (stands for initialization), COLL (stands for collectives), P2P (stands for peer-to-peer), SHM (stands for shared memory), NET (stands for network), and ALL (includes every subsystem). |
5.5. Support
Register for the NVIDIA Developer Program to report bugs, issues and make requests for feature enhancements. For more information, see: https://developer.nvidia.com/developer-program.
Notices
Notice
THE INFORMATION IN THIS GUIDE AND ALL OTHER INFORMATION CONTAINED IN NVIDIA DOCUMENTATION REFERENCED IN THIS GUIDE IS PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE INFORMATION FOR THE PRODUCT, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the product described in this guide shall be limited in accordance with the NVIDIA terms and conditions of sale for the product.
THE NVIDIA PRODUCT DESCRIBED IN THIS GUIDE IS NOT FAULT TOLERANT AND IS NOT DESIGNED, MANUFACTURED OR INTENDED FOR USE IN CONNECTION WITH THE DESIGN, CONSTRUCTION, MAINTENANCE, AND/OR OPERATION OF ANY SYSTEM WHERE THE USE OR A FAILURE OF SUCH SYSTEM COULD RESULT IN A SITUATION THAT THREATENS THE SAFETY OF HUMAN LIFE OR SEVERE PHYSICAL HARM OR PROPERTY DAMAGE (INCLUDING, FOR EXAMPLE, USE IN CONNECTION WITH ANY NUCLEAR, AVIONICS, LIFE SUPPORT OR OTHER LIFE CRITICAL APPLICATION). NVIDIA EXPRESSLY DISCLAIMS ANY EXPRESS OR IMPLIED WARRANTY OF FITNESS FOR SUCH HIGH RISK USES. NVIDIA SHALL NOT BE LIABLE TO CUSTOMER OR ANY THIRD PARTY, IN WHOLE OR IN PART, FOR ANY CLAIMS OR DAMAGES ARISING FROM SUCH HIGH RISK USES.
NVIDIA makes no representation or warranty that the product described in this guide will be suitable for any specified use without further testing or modification. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to ensure the product is suitable and fit for the application planned by customer and to do the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this guide. NVIDIA does not accept any liability related to any default, damage, costs or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this guide, or (ii) customer product designs.
Other than the right for customer to use the information in this guide with the product, no other license, either expressed or implied, is hereby granted by NVIDIA under this guide. Reproduction of information in this guide is permissible only if reproduction is approved by NVIDIA in writing, is reproduced without alteration, and is accompanied by all associated conditions, limitations, and notices.
Trademarks
NVIDIA, the NVIDIA logo, and cuBLAS, CUDA, cuDNN, cuFFT, cuSPARSE, DALI, DIGITS, DGX, DGX-1, Jetson, Kepler, NVIDIA Maxwell, NCCL, NVLink, Pascal, Tegra, TensorRT, and Tesla are trademarks and/or registered trademarks of NVIDIA Corporation in the Unites States and other countries. Other company and product names may be trademarks of the respective companies with which they are associated.