Python Operators¶
This example shows how to run custom Python code using family of DALI PythonFunction Operators to prototype new augmentations or debug the Pipeline. The idea behind these Operators is to provide a capability to execute Python code operating on DALI tensors’ data within the pipeline execution.
Defining an operation¶
The first kind of Operator we will try is PythonFunction. It wraps a regular Python function and runs it inside a DALI Pipeline. Let us define such a function as an example. We will name it edit_images.
[1]:
from nvidia.dali.pipeline import Pipeline
import nvidia.dali.ops as ops
import nvidia.dali.types as types
import numpy as np
def edit_images(image1, image2):
assert image1.shape == image2.shape
h, w, c = image1.shape
y, x = np.ogrid[0:h, 0:w]
mask = (x - w / 2) ** 2 + (y - h / 2) ** 2 > h * w / 9
result1 = np.copy(image1)
result1[mask] = image2[mask]
result2 = np.copy(image2)
result2[mask] = image1[mask]
return result1, result2
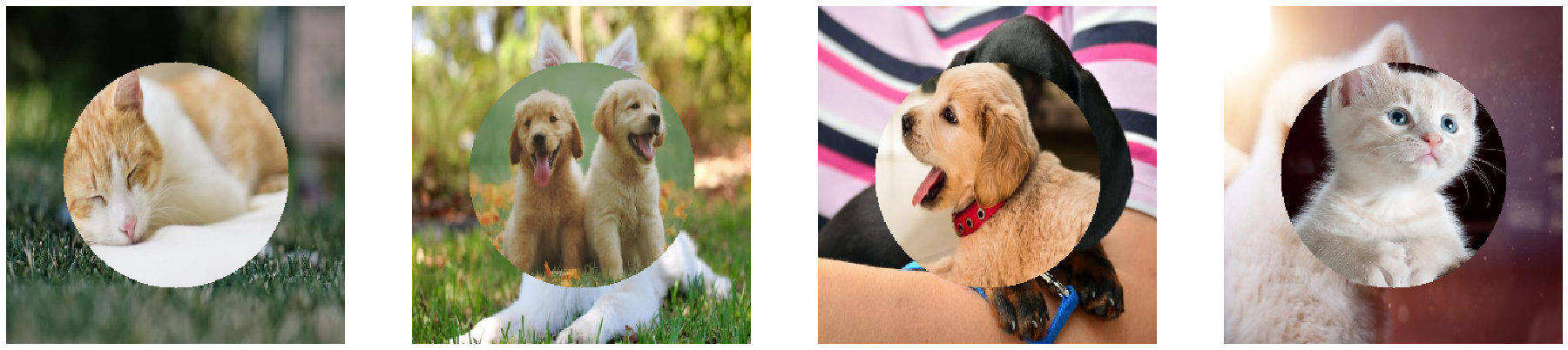
In this case it takes two arrays as input and returns two outputs. The code creates a circular mask and uses it to swap those circular parts between two inputs. PythonFunction uses NumPy arrays as data format for CPU and CuPy arrays for GPU. Note that we do a copy of both images because the input data should not be modified.
Defining a pipeline¶
To see the Operator in action, we implement a simple data pipeline. We wrap the edit_images by passing it as function parameter to PythonFunction. See that in addition to the function, we pass the number of outputs as a parameter. Having constructed PythonFunction as seen below, we can use it in the define_graph method like any other Operator.
[2]:
image_dir = '../data/images'
class CommonPipeline(Pipeline):
def __init__(self, batch_size, num_threads, device_id, image_dir):
super(CommonPipeline, self).__init__(batch_size, num_threads, device_id, exec_async=False,
exec_pipelined=False, seed=99)
self.input1 = ops.FileReader(file_root=image_dir, random_shuffle=True)
self.input2 = ops.FileReader(file_root=image_dir, random_shuffle=True)
self.decode = ops.ImageDecoder(device='cpu', output_type=types.RGB)
self.resize = ops.Resize(resize_x=300, resize_y=300)
def load(self):
jpegs1, labels = self.input1()
jpegs2, labels = self.input2()
im1, im2 = self.decode([jpegs1, jpegs2])
return self.resize([im1, im2])
class PythonFuncPipeline(CommonPipeline):
def __init__(self, batch_size, num_threads, device_id, image_dir):
super(PythonFuncPipeline, self).__init__(batch_size, num_threads, device_id, image_dir)
self.edit_images = ops.PythonFunction(function=edit_images, num_outputs=2)
def define_graph(self):
images1, images2 = self.load()
res1, res2 = self.edit_images(images1, images2)
return res1, res2
Running the pipeline and visualizing the results¶
Now we can just run the pipeline as usual to see the results.
[3]:
import matplotlib.pyplot as plt
import matplotlib.gridspec as gridspec
from matplotlib import cm
%matplotlib inline
batch_size = 4
def show_images(image_batch):
columns = 4
rows = (batch_size + 1) // columns
fig = plt.figure(figsize=(32, (32 // columns) * rows))
gs = gridspec.GridSpec(rows, columns)
for j in range(rows*columns):
plt.subplot(gs[j])
plt.axis("off")
plt.imshow(image_batch.at(j))
pipe = PythonFuncPipeline(batch_size, 4, 0, image_dir)
pipe.build()
ims1, ims2 = pipe.run()
show_images(ims1)
show_images(ims2)

Variety of Python Operators¶
PythonFunction comes in different flavors in DALI. The basic idea stays the same but data format on which the implementation operates differs:
PythonFunction- works on arrays,TorchPythonFunction- works on PyTorch tensors,DLTensorPythonFunction- works on DLPack tensors.
The most universal of these is DLTensorPythonFunction as DLPack is an open standard for tensor storage and many frameworks and libraries implement conversion methods from and to DLPack tensors. Internally it is used to implement all the other kinds of Python Operator.
TorchPythonFunction and DLTensorPythonFunction¶
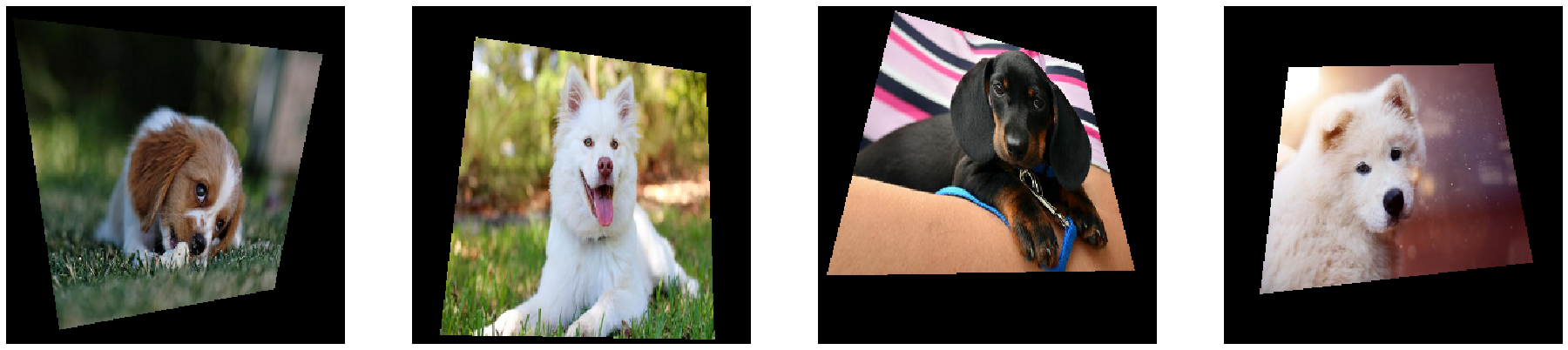
The example below presents the usage of PyTorch functions inside DALI pipeline. The preferred way to do this would be just utilizing the TorchPythonFunction Operator but we will also use the DLTensorPythonFunction to show how to work with DLPack tensors.
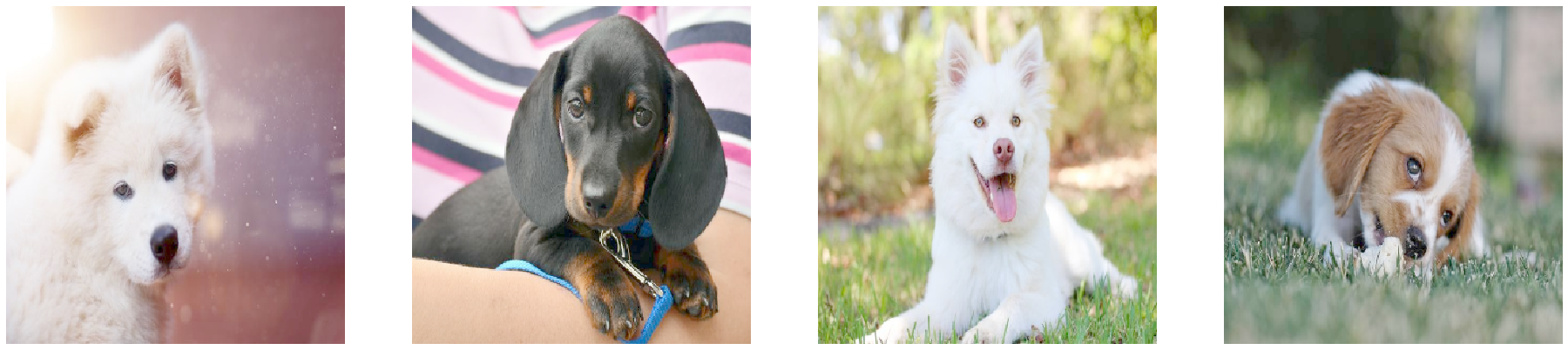
We employ torchvision RandomPerspective transform in the perspective function and we wrap it in TorchPythonFunction. The dlpack_manipulation function shows how to handle DLPack data. The input batch is converted to a list of PyTorch tensors, then it is processed and converted back to DLPack tensors.
Note that every Python operator has the batch_processing parameter. It says whether the implementation function will get the whole batch as a list of tensors or it will be called per sample. Due to historical reasons, for DLTensorPythonFunction, this parameter is set to True by default. We can look at dlpack_manipulation to see how to deal with this kind of input.
[4]:
import nvidia.dali.plugin.pytorch as dalitorch
import torch
import torch.utils.dlpack as torch_dlpack
import torchvision.transforms as transforms
transform = transforms.Compose([transforms.ToPILImage(),
transforms.RandomPerspective(p=1.),
transforms.ToTensor()])
def perspective(t):
return transform(t).transpose(2, 0).transpose(0, 1)
def dlpack_manipulation(dlpacks):
tensors = [torch_dlpack.from_dlpack(dlpack) for dlpack in dlpacks]
output = [(tensor.to(torch.float32) / 255.).sqrt() for tensor in tensors]
output.reverse()
return [torch_dlpack.to_dlpack(tensor) for tensor in output]
class TorchFuncPipeline(CommonPipeline):
def __init__(self, batch_size, num_threads, device_id, image_dir):
super(TorchFuncPipeline, self).__init__(batch_size, num_threads, device_id, image_dir)
self.norm = ops.CropMirrorNormalize(std=255., mean=0.)
self.perspective = dalitorch.TorchPythonFunction(function=perspective)
self.sqrt_color = ops.DLTensorPythonFunction(function=dlpack_manipulation)
def define_graph(self):
images, _ = self.load()
res1 = self.perspective(self.norm(images))
res2 = self.sqrt_color(images)
return res1, res2
[5]:
torch_pipeline = TorchFuncPipeline(4, 4, 0, image_dir)
torch_pipeline.build()
x, y = torch_pipeline.run()
show_images(x)
show_images(y)
Limitations of Python operators¶
As we could see, pipelines that incorporate Python operators has to be constructed with exec_async=False and exec_pipelined=False specified. It was necesary to make it possible to call Python code from inside of DALI but it hits the performance of data pipelines. In addition to that, Python operators cannot utilize more than one CPU core due to Python threading model. Taking all that into account, Python operators can be very useful for testing, debugging or prototyping, but are not
considered as a production level solution for extending DALI.