Table of Contents
Description
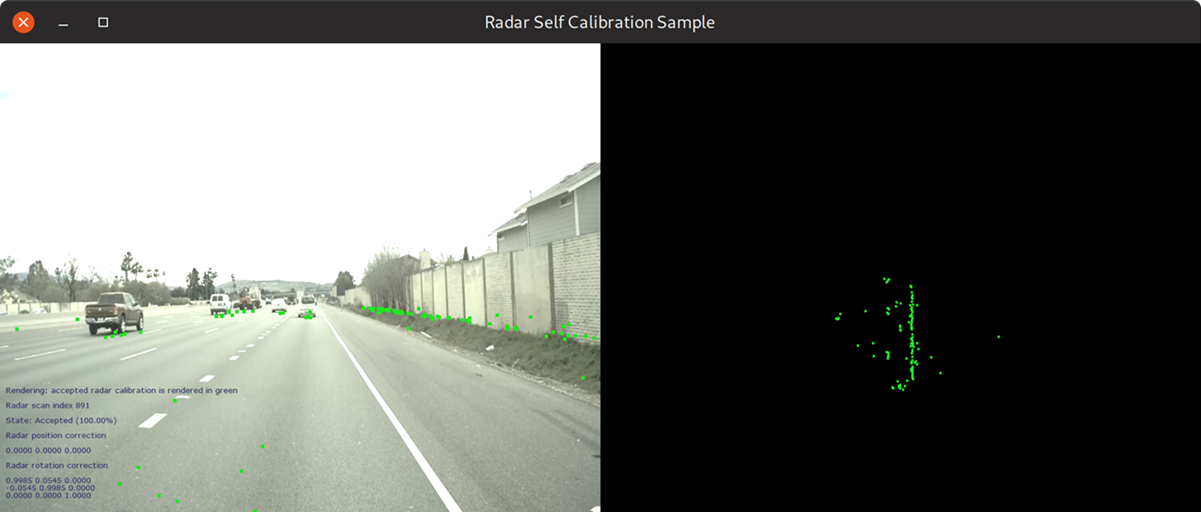
The NVIDIA® DriveWorks Radar self-calibration sample shows how to use the DriveWorks Radar self-calibration module. The sample uses RadarDopplerMotion to determine the radar motion for each radar scan. Then, use the corresponding radar motion to estimate the radar yaw angle. Using radar we can calibrate also other odometry properties. That is velocity_factor, which maps speed measurement as reported by the odometry to speed as measured using radars, and wheel_radius[] which is the radius of each wheel.
Running the Sample
The Radar calibration sample, sample_calibration_radar, accepts the following optional parameters. If none are specified, the Radar extrinsics are estimated on a default dataset.
./sample_calibration_radar --rig=[path/to/rig/configuration/file]
--output-rig=[output/rig/file]
--radar-sensor=[integer/sensor-name]
--camera-sensor=[integer/sensor-name]
--can-sensor=[integer/sensor-name]
--calibrate-odometry-properties=[1]
where
--rig=[path/to/rig/configuration/file]
Path to the rig configuration file.
Default value: data/samples/recordings/highway0/rig8Radars.json
--output-rig=[output/rig/file]
Output rig configuration file, which contains updated Radar Extrinsics, velocity_factor, and updated wheel radii.
Default value: rig_updated.json
--radar-sensor=[integer]
The index or name of the radar sensor in the rig configuration file to calibrate
Default value: 0
--camera-sensor=[integer]
The index or name of the camera sensor in the rig configuration file (used for visualization only)
Default value: 0
--can-sensor=[integer]
The index or name of the CAN sensor in the rig configuration file
Default value: 0
--calibrate-odometry-properties=[1]
Bitwise combination of: [1] wheel radius calibration using selected radar [2] enable odometry speed factor. Specifying [3] will enable both.
To pause the sample, press SPACE.
To exit the sample, press ESC.
- Note
- Depending on
--rigOutFile, you may need to start the sample with sudo
Output
Additional information
For more information on Radar calibration, see Radar Self-Calibration.