Table of Contents
Description
The Radar Replay sample demonstrates how to connect to a Radar and display the generated point cloud in 3D. For a list of currently supported Radar devices, see the Release Notes.
Description Prerequisites
- The Radar must be up and running, and connected to the network.
- If the radar being used is the Continental ARS430 ethernet radar, the following commands need to be executed to setup the routing tables.
On Linux execute:
ARS430 Radar: sudo ifconfig eth0:900 10.1.0.81 || true sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eth0:900 || true sudo route add -net 10.1.0.0 netmask 255.255.0.0 dev eth0:900 || true
ARS430 RDI Radar: sudo ifconfig eth0:900 192.168.3.81 || true sudo route add -net 224.0.0.0 netmask 240.0.0.0 dev eth0:900 || true sudo route add -net 192.168.3.0 netmask 255.255.255.0 dev eth0:900 || true
Running the sample
The Radar Replay sample, sample_radar_replay, accepts the following parameters:
./sample_radar_replay --protocol=[radar.virtual|radar.socket|radar.custom]
--params=[comma/separated/key/value/pairs]
--profiling=[0|1]
Where:
--protocol=[radar.virtual|radar.socket|radar.custom]
Allows to specify which Radar driver to use.
radar.virtual is used for recorded file
radar.socket is used for live IP based radars and custom decoder plugin based radars
radar.custom is used for custom full sensor plugin based radars
Default value: radar.virtual
--params=[comma/separated/key/value/pairs]
Different parameters are available for each Radar driver.
Default value: file=path/to/data/samples/sensors/radar/conti/radar_0.bin
--profiling=[0|1]
When set to 1, enables sample profiling.
Otherwise, profiling is disabled.
Default value: 1
The following interactions with the sample are available at runtime:
- Mouse left button: rotates the point cloud.
- Mouse wheel: zooms in or out.
- SPACE: makes a pause.
- R: resets the camera view and the artificially increased or decreased frame rate.
- G: shows/hides circular and rectangular grid.
- F1 shows/hides text message hints.
- Note
- For a full list of key/value pairs that can be passed to –params see Sensor Enumeration Sample.
Examples
Display live Radar point clouds
./sample_radar_replay --protocol=radar.socket --params=device=[type of device],ip=[radar IP address],port=[radar port]
Where [type of device] is one of the following:
- CONTINENTAL_ARS430
- CONTINENTAL_ARS430_RDI
- CONTINENTAL_ARS430_RDI_V2
- DELPHI_ESR2_5
- CUSTOM
- Note
- In case of CONTINENTAL_ARS430, the additional parameter
multicast-ip=239.0.0.1is required. - For more information on using custom sensors see Integrating with Custom Sensors.
Display recorded Radar point clouds
./sample_radar_replay --params=file=[radar bin file]
- The Radar file can be obtained with the provided recording tools.
- If no arguments are passed, a default Radar file is loaded.
Display custom Radar Plugin point clouds
./sample_radar_replay --protocol=radar.custom --params=decoder-path=<path_to_so>[,<custom params>]
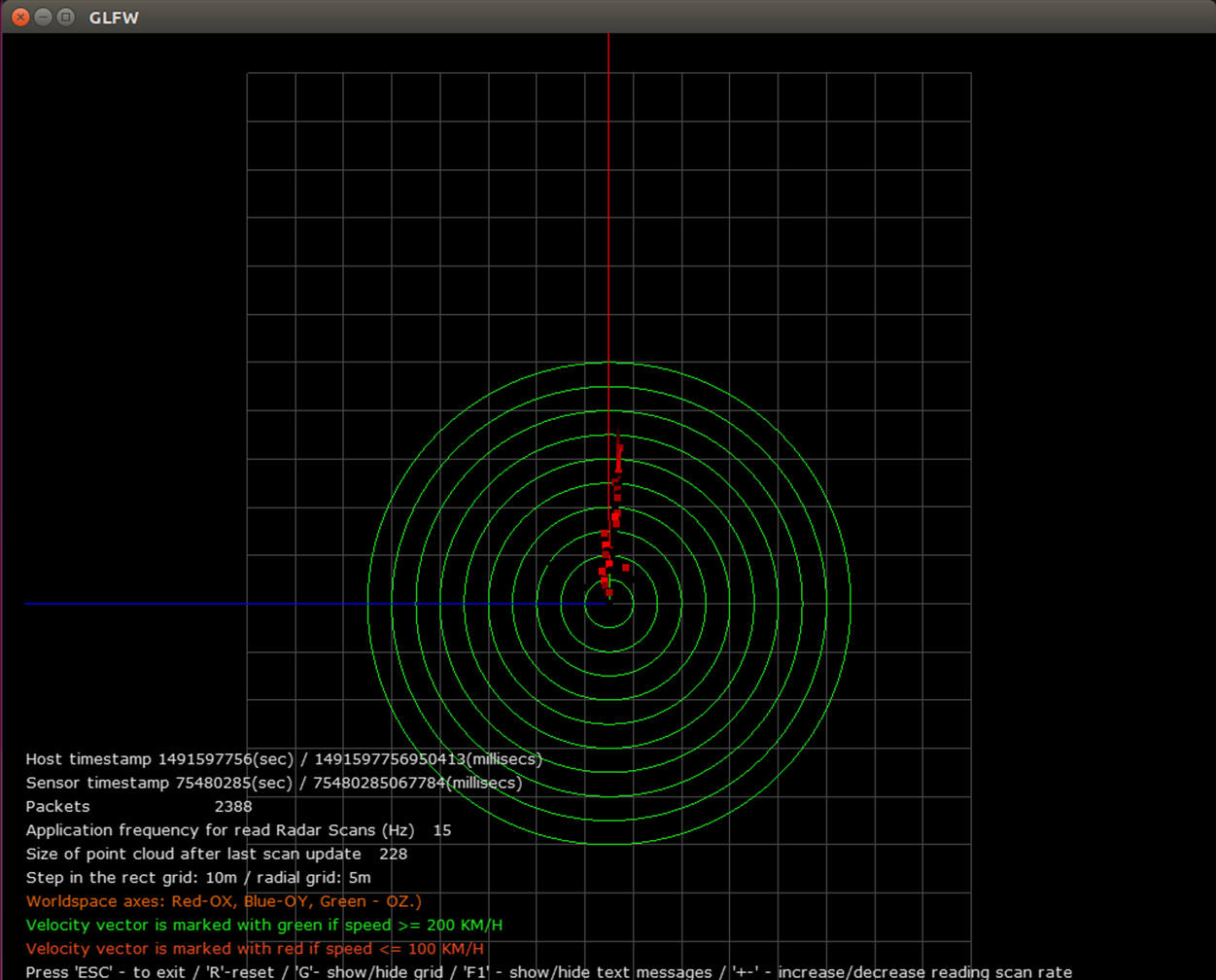
Output
The sample opens a window to display a 3D point cloud. The output contains directed unit velocity vectors, other than the points displayed. If the velocity is 100 km/h or less, the directed vectors are red. If it is 200 km/h or more, they are green.
Worldspace axes:
- Red-OX.
- Blue-OY.
- Green-OZ.
Additional Information
For more details see Radar.