- Note
- This tool is available in both NVIDIA DriveWorks and NVIDIA DRIVE Software releases.
This tool is available on the x86 Host System and NVIDIA DRIVE™ OS Linux.
This is a front-end for the Basic Recording Tool, and provides the following additional features:
- Automatic Storage Selection
- Manual Storage Selection
- Sensor Throughput Statistics
- Multi-SSD Recording
- Distributed Recording
- Black Box Recorder (BBR)
Starting the Recording Application
Run this tool by executing:
cd /usr/local/driveworks/tools/capture ./recorder-tui <rig file> OR <rig_directory> [--bbr] `bbr` starts the recorder in black box recording (bbr) mode.
After initialization, the tool supports the following commands:
| Command | Action |
|---|---|
s <Enter> | toggle recording |
q <Enter> | quit |
start <Enter> | start recording |
stop <Enter> | stop recording |
bbr <Enter> | bbr recording mode |
continuous <Enter> | continuous recording mode |
h264 <Enter> | record camera in h264 |
lraw <Enter> | record camera in lraw |
bbr, continuous, h264 and lraw switch is supported only when the recorder is in stopped state.
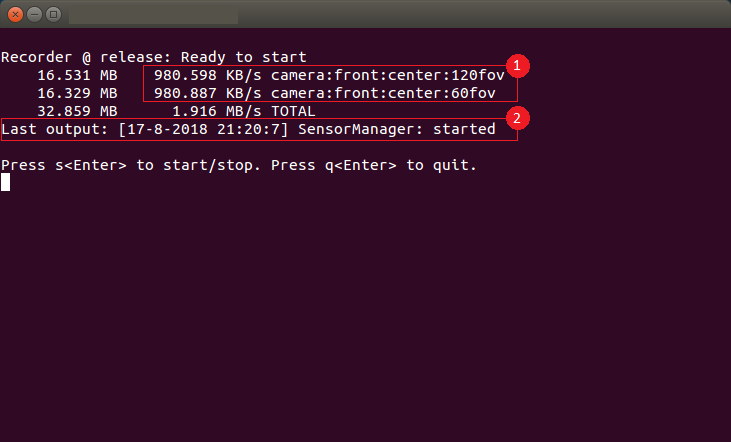
User Interface
The textual interface of the tool is illustrated in the screenshot below:
- Sensor Throughput Statistics
- Last error/output message
Automatic Storage Selection
This tool can discover SSD/eSATA disks that are mounted on the target and meet the following criteria:
ext4filesystem format> 5GBfree space available- visible in
/proc/mounts - Mountpoint does not contain any spaces or non-standard characters
This tool automatically selects the first available disk for recording. Once a disk becomes full (free space < 5GB), output files will be put into the next available disk automatically.
Manual Storage Selection
If automatic disk selection is not convenient, one can manually specify the recording directory in the rig configuration file using the "recorder_storage_paths":
{
"rig": {
"recorder_storage_map": {
"<sensor_name_1>": "1",
"<sensor_name_2>": "0",
"<sensor_name_3>": "0",
<...>
},
"recorder_storage_paths": [
"<your_storage_path_1>",
"<your_storage_path_2>",
<...>
],
<...>
},
<...>
}
"recorder_storage_map" is used to map the sensor to the index of "recorder_storage_paths" list. Example: "sensor_name_1" is mapped to index "1" which is "your_storage_path_2". If the sensor map is not provided, then the default value of the storage index "0" will be selected.
- Note
- The manually specified mountpoint must still be on an
ext4filesystem and have> 5GBin free space.
Sensor Throughput Statistics
This tool measures sensor statistics (at disk sink).
- Data throughput per sensor
- Data written per sensor
- Data written for current recording on current sink
Multi-SSD Recording
The Manual Storage Selection feature can be used to perform multi-SSD recording on a single Xavier device.
To achieve this, a user must create multiple rig files, each with their specified storage path and subset of sensors, and place them inside a <rig_directory>.
The tool can then be launched as below:
./recorder-tui <rig_directory>
Black Box Recorder (BBR)
Black Box Recorder (BBR) records sensor data clips around a vehicle disengagement trigger event. BBR automatically deletes the recording folders of current recording session expect the last three. If a lateral or longitudinal disengagement occurs, BBR preserves the 30 seconds before and after the point of disengagement. The disengagement folder will have two or three recording folders depending on the exact time of the disengagement. BBR internally uses recorder-tui, so the recording data format and directory structure will be identical to the normal recording case.
./recorder-tui <rig_directory> --bbr
- Note
- BBR relies on Dataspeed CAN messages to find the disengagement triggers.
Distributed Recording
Configuring the Recorder
Recording Tags
When using recorder-tui to record a session, it can be useful to be able to tag these sessions. With recorder-tui you can pass in --tag <tag-name> to set a tag for the recorded session which will appear in the aux_info file. The valid values for this tag will need to be specified under the tags.txt file which should appear under your configuration directory that you pass to recorder-tui.
Recording
When using recorder-tui to record a session, we can enable or disable encryption. It can be passed as a parameter --disable-encryption or --enable-encryption, by default, encryption is disabled. When encryption is enabled, encryption key is required to encrypt the recording. Encryption key can be provided as a parameter --rsa-key <path-to-encryption>, by default "/home/nvidia/.ssh/recorder-aiinfra.pem" path is used.
Fields
The recorder-tui requires input arguments to collect metadata for a given drive. These fields values are collected as command-line inputs before the recorder launches a recording session. These fields are stored in the yaml file 'auxFile', which is written to the recording session directory.
Fields required: Route: Four digit code used to identify the route recorded in the given session.
Lane: (optional) Certain data collection use-cases require a single lane to be selected for drives along a given route. This field can be left blank to indicate that no particular lane is being driven in the current drive session. Lanes are designated 1-8 with 1 being the rightmost lane and indexes increasing right-to-left like so:
| | | | | | |M| | | | | |e| | | | | |d| | | | | |i| | | | | |a| 4 | 3 | 2 | 1 | 0 = No lane selected |n| | | | | | | | | | |
If you are not performing a data collection drive in a specific lane leave this section blank.
Login-ID: Name of the car operator.
Description: (optional) Text entry field for the car operator to include manual notes.