StereoDisparity.h File Reference
Declares functions that implement stereo disparity estimation algorithms. More...
#include "../Export.h"#include "../ImageFormat.h"#include "../Status.h"#include "../Types.h"#include <stdint.h> Include dependency graph for StereoDisparity.h:
Include dependency graph for StereoDisparity.h: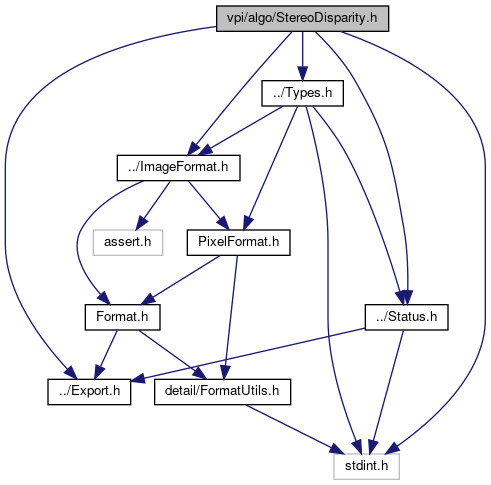
Go to the source code of this file.
Data Structures | |
| struct | VPIStereoDisparityEstimatorParams |
| Structure that defines the parameters for vpiCreateStereoDisparityEstimator. More... | |
Functions | |
| VPIStatus | vpiCreateStereoDisparityEstimator (VPIBackend backend, uint32_t imageWidth, uint32_t imageHeight, const VPIImageFormat inputFormat, const uint32_t maxDisparity, VPIPayload *payload) |
| Creates payload for vpiSubmitStereoDisparityEstimator. More... | |
| VPIStatus | vpiSubmitStereoDisparityEstimator (VPIStream stream, VPIPayload payload, VPIImage left, VPIImage right, VPIImage disparity, const VPIStereoDisparityEstimatorParams *params) |
| Runs stereo processing on a pair of images and outputs a disparity map. More... | |
Detailed Description
Declares functions that implement stereo disparity estimation algorithms.
Definition in file StereoDisparity.h.