Runs KLT Feature tracking on a sequence of frames. More...
Data Structures | |
| struct | VPIKLTFeatureTrackerCreationParams |
| Creation parameters of KLT Feature Tracker. More... | |
| struct | VPIKLTFeatureTrackerParams |
| Structure that defines the parameters for vpiCreateKLTFeatureTracker. More... | |
| struct | VPIKLTTrackedBoundingBox |
| Stores a bounding box that is being tracked by KLT Tracker. More... | |
Enumerations | |
| enum | VPIKLTFeatureTrackerType |
| KLT Feature Tracker algorithm type. More... | |
Functions | |
| VPIStatus | vpiInitKLTFeatureTrackerCreationParams (VPIKLTFeatureTrackerCreationParams *params) |
| Initialize VPIKLTFeatureTrackerCreationParams with default values. More... | |
| VPIStatus | vpiCreateKLTFeatureTracker (uint32_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat imageFormat, const VPIKLTFeatureTrackerCreationParams *params, VPIPayload *payload) |
| Creates payload for vpiSubmitKLTFeatureTracker. More... | |
| VPIStatus | vpiSubmitKLTFeatureTracker (VPIStream stream, uint32_t backend, VPIPayload payload, VPIImage templateImage, VPIArray inputBoxList, VPIArray inputPredictionList, VPIImage referenceImage, VPIArray outputBoxList, VPIArray outputEstimationList, const VPIKLTFeatureTrackerParams *params) |
| Runs KLT Feature Tracker on two frames. More... | |
Detailed Description
Runs KLT Feature tracking on a sequence of frames.
Data Structure Documentation
◆ VPIKLTFeatureTrackerCreationParams
| struct VPIKLTFeatureTrackerCreationParams |
Creation parameters of KLT Feature Tracker.
Definition at line 79 of file KLTFeatureTracker.h.
 Collaboration diagram for VPIKLTFeatureTrackerCreationParams:
Collaboration diagram for VPIKLTFeatureTrackerCreationParams:◆ VPIKLTFeatureTrackerParams
| struct VPIKLTFeatureTrackerParams |
Structure that defines the parameters for vpiCreateKLTFeatureTracker.
Definition at line 134 of file KLTFeatureTracker.h.
Collaboration diagram for VPIKLTFeatureTrackerParams:| Data Fields | ||
|---|---|---|
| float | maxScaleChange |
Maximum relative scale change. Scale changes larger than this will make KLT consider that tracking was lost. |
| float | maxTranslationChange |
Maximum relative translation change. Translation changes larger than this will make KLT consider that tracking was lost. |
| float | nccThresholdKill |
Threshold to consider template tracking was lost. Must be a value between 0 and 1. |
| float | nccThresholdStop | Threshold to stop estimating. |
| float | nccThresholdUpdate |
Threshold for requiring template update. Must be a value between 0 and 1. |
| int32_t | numberOfIterationsScaling | Number of Inverse compositional iterations of scale estimations. |
| VPIKLTFeatureTrackerType | trackingType | Type of KLT tracking that will be performed. |
◆ VPIKLTTrackedBoundingBox
| struct VPIKLTTrackedBoundingBox |
Stores a bounding box that is being tracked by KLT Tracker.
Collaboration diagram for VPIKLTTrackedBoundingBox: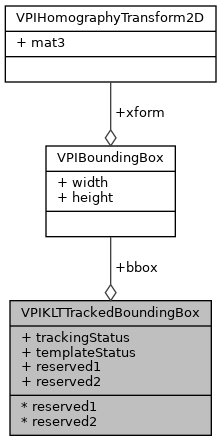
| Data Fields | ||
|---|---|---|
| VPIBoundingBox | bbox | Bounding box being tracked. |
| uint8_t | reserved1 | Reserved for future use. |
| uint8_t | reserved2 | Reserved for future use. |
| int8_t | templateStatus |
Status of the template related to this bounding box. Accepted values:
|
| int8_t | trackingStatus |
Tracking status of this bounding box. Accepted values:
|
Enumeration Type Documentation
◆ VPIKLTFeatureTrackerType
#include <vpi/algo/KLTFeatureTracker.h>
KLT Feature Tracker algorithm type.
| Enumerator | |||
|---|---|---|---|
| VPI_KLT_INVERSE_COMPOSITIONAL | Inverse compositional algorithm for KLT tracker. The inverse compositional algorithm is a reformulation of the classic Lucas-Kanade algorithm to make the steepest-descent images and Hessian constant.
| ||
Definition at line 117 of file KLTFeatureTracker.h.
Function Documentation
◆ vpiCreateKLTFeatureTracker()
| VPIStatus vpiCreateKLTFeatureTracker | ( | uint32_t | backends, |
| int32_t | imageWidth, | ||
| int32_t | imageHeight, | ||
| VPIImageFormat | imageFormat, | ||
| const VPIKLTFeatureTrackerCreationParams * | params, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/KLTFeatureTracker.h>
Creates payload for vpiSubmitKLTFeatureTracker.
- Parameters
-
[in] backends VPI backends that are eligible to execute the algorithm. Currently only one backend is accepted. [in] imageWidth,imageHeight Input image dimensions. [in] imageFormat Input image format. [in] params [out] payload Pointer to memory where the created payload handle will be written to.
- Returns
- an error code on failure else VPI_SUCCESS.
◆ vpiInitKLTFeatureTrackerCreationParams()
| VPIStatus vpiInitKLTFeatureTrackerCreationParams | ( | VPIKLTFeatureTrackerCreationParams * | params | ) |
#include <vpi/algo/KLTFeatureTracker.h>
Initialize VPIKLTFeatureTrackerCreationParams with default values.
Default values:
- maxTemplateCount: 64
- maxTemplateWidth: 64
- maxTemplateHeight: 64
- Parameters
-
[out] params Structure to be filled with default values.
- Returns
- an error code on failure else VPI_SUCCESS.
◆ vpiSubmitKLTFeatureTracker()
| VPIStatus vpiSubmitKLTFeatureTracker | ( | VPIStream | stream, |
| uint32_t | backend, | ||
| VPIPayload | payload, | ||
| VPIImage | templateImage, | ||
| VPIArray | inputBoxList, | ||
| VPIArray | inputPredictionList, | ||
| VPIImage | referenceImage, | ||
| VPIArray | outputBoxList, | ||
| VPIArray | outputEstimationList, | ||
| const VPIKLTFeatureTrackerParams * | params | ||
| ) |
#include <vpi/algo/KLTFeatureTracker.h>
Runs KLT Feature Tracker on two frames.
Outputs tracked bounding boxes and estimated transform array.
- Parameters
-
[in] stream The stream where the operation will be queued in. [in] backend Backend that will execute the algorithm. Must be one of the backends specified during payload creation. If 0, VPI will select one of the eligible backends from the payload that accepts the given parameters, usually the fastest one. [in] payload payload created with vpiCreateKLTFeatureTracker [in] referenceImage reference image [in] inputBoxList Input bounding box array, must have type VPI_ARRAY_TYPE_KLT_TRACKED_BOUNDING_BOX [in] inputPredictionList Input predicted transform array, must have type VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D [in] templateImage template image [out] outputBoxList output Bounding box array, must have type VPI_ARRAY_TYPE_KLT_TRACKED_BOUNDING_BOX [out] outputEstimationList Sstimated transform array, must have type VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D [in] params Control parameters of the KLT feature tracker algorithm.
- Returns
- an error code on failure else VPI_SUCCESS