Overview
Histogram equalization is a method in image processing of contrast adjustment using the image's histogram. For more information, see [1].
| Input | Output |
|---|---|
 |  |
Implementation
This algorithm is trying to find a new mapping palette based on the histogram. Consider a grayscale image X, whose total number of gray levels in the image is L, Denote the histogram of the image as \(H_x\). The probability of an occurrence of a pixel of level \(i\) in the image is:
\[ p[i] = H_x[i] / N \]
where:
- \(N\) is total number of pixels in the image.
The cumulative distribution function corresponding to \(p[i]\) is:
\[ cdf_x[i] = \sum_{j=0}^{i}p[j] \]
Using the cumulative distribution function to transform the original pixel value to a new pixel value, the corresponding pixel value is:
\[ y[i] = \sum_{j=0}^{i}p[j] * L \]
Example of image histogram after equalization:
| Input | Equalized Output |
|---|---|
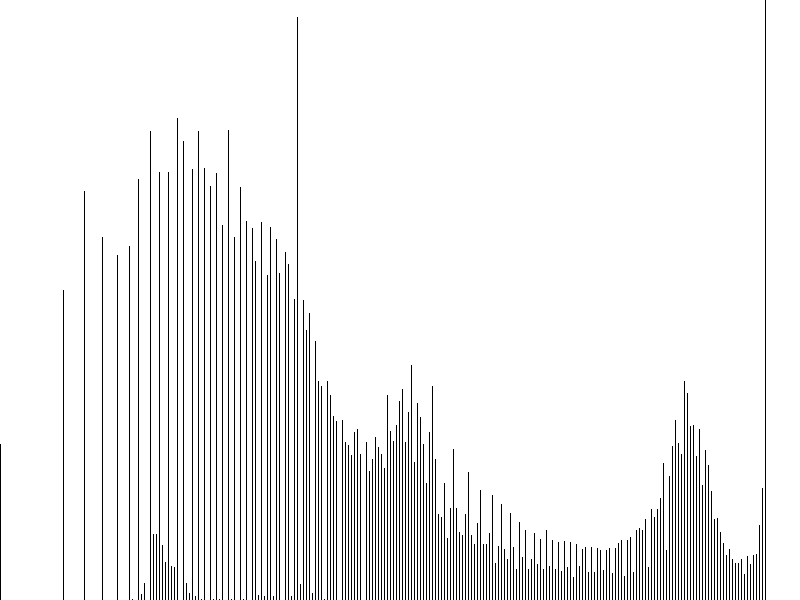 | 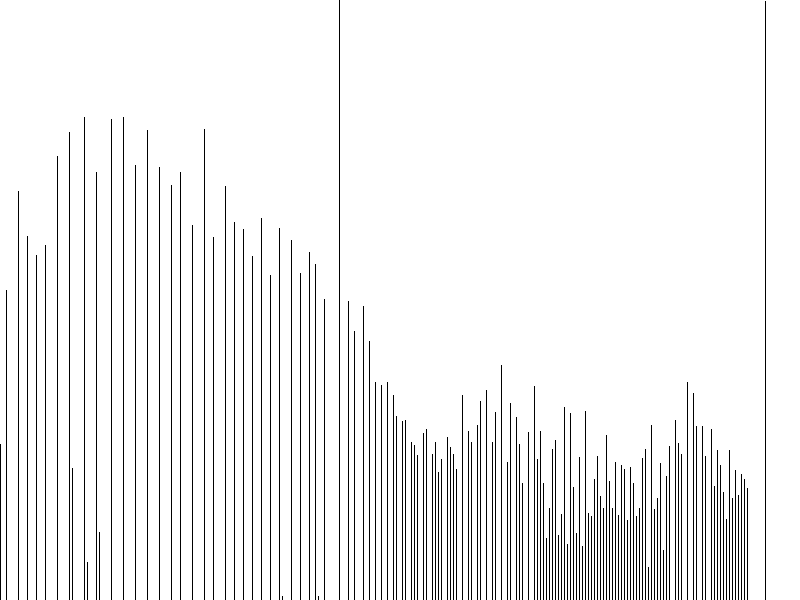 |
C API functions
For list of limitations, constraints and backends that implements the algorithm, consult reference documentation of the following functions:
| Function | Description |
|---|---|
| vpiCreateEqualizeHist | Creates payload for vpiSubmitEqualizeHist. |
| vpiSubmitEqualizeHist | Equalize the histogram of the image. |
Usage
Language:- Import VPI module import vpi
- Use the CUDA backend to equalize the input image histogram, creating output VPI image with the result. with vpi.Backend.CUDA:output = input.eqhist()
- Initialization phase
- Include the header that defines the image equalize histogram function. #include <vpi/algo/EqualizeHist.h>Declares functions that equalize the histogram of the source image.
- Define the input image. VPIImage input = /*...*/;
- Create the output image. int w, h;vpiImageGetSize(input, &w, &h);VPIImage output;vpiImageCreate(w, h, VPI_IMAGE_FORMAT_U8, 0, &output);#define VPI_IMAGE_FORMAT_U8Single plane with one 8-bit unsigned integer channel.Definition: ImageFormat.h:100VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)Create an empty image instance with the specified flags.VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)Get the image dimensions in pixels.
- Since this algorithm needs temporary memory buffers, create the payload for it on the CUDA backend. VPIPayload payload;VPIStatus vpiCreateEqualizeHist(uint64_t backend, VPIImageFormat fmt, VPIPayload *payload)Creates payload for vpiSubmitEqualizeHist.
- Create the stream where the algorithm will be submitted for execution. VPIStream stream;vpiStreamCreate(0, &stream);VPIStatus vpiStreamCreate(uint64_t flags, VPIStream *stream)Create a stream instance.
- Include the header that defines the image equalize histogram function.
- Processing phase
- Submit the algorithm to the stream using the CUDA backend, along with all parameters. vpiSubmitEqualizeHist(stream, VPI_BACKEND_CUDA, payload, input, output);VPIStatus vpiSubmitEqualizeHist(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage input, VPIImage output)Equalize the histogram of the image.
- Optionally, wait until the processing is done. vpiStreamSync(stream);VPIStatus vpiStreamSync(VPIStream stream)Blocks the calling thread until all submitted commands in this stream queue are done (queue is empty)...
- Submit the algorithm to the stream using the CUDA backend, along with all parameters.
- Cleanup phase
- Free resources held by the stream and the input and output images. vpiStreamDestroy(stream);vpiImageDestroy(input);vpiImageDestroy(output);vpiPayloadDestroy(payload);void vpiPayloadDestroy(VPIPayload payload)Deallocates the payload object and all associated resources.void vpiStreamDestroy(VPIStream stream)Destroy a stream instance and deallocate all HW resources.
- Free resources held by the stream and the input and output images.
For more information, see Equalize Image Histogram in the "C API Reference" section of VPI - Vision Programming Interface.
Performance
For information on how to use the performance table below, see Algorithm Performance Tables.
Before comparing measurements, consult Comparing Algorithm Elapsed Times.
For further information on how performance was benchmarked, see Performance Benchmark.