Overview
Given a pair of rectified images from a stereo camera, the Stereo Disparity algorithm uses high-quality dense stereo matching to produce an output image of the same resolution as the input with left-right disparity information. This allows for inferring the depth of the scene captured by the left and right images.
| Left image | Right image |
|---|---|
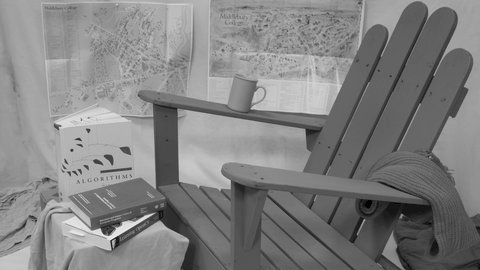 |  |
| Disparity map | Confidence map |
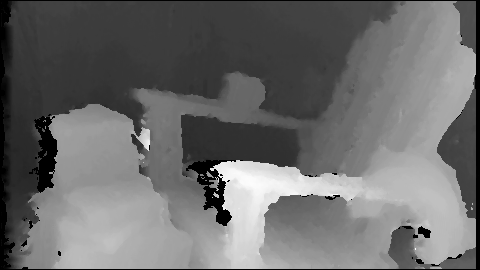 | 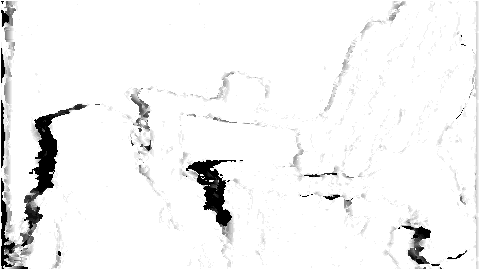 |
Implementation
The stereo disparity estimator uses semi-global matching algorithm (SGM) to compute the disparity for the CUDA backend. The OFA backend (that can be combined with VIC and PVA backends) does an advanced version of the SGM algorithm to optimize memory bandwidth and performance.
The main differences of the advanced version of SGM in OFA backend and the SGM in CUDA backend are:
- CUDA has a higher memory footprint, which may restrict the algorithm usage as it may exhaust the GPU memory
- OFA allows up to 8192x8192 input image resolution without consuming CPU or GPU memory resources
- CUDA allows to control the uniqueness ratio in VPIStereoDisparityEstimatorParams
- OFA allows to control the number of passes and the P2 alpha in VPIStereoDisparityEstimatorParams
C API functions
For list of limitations, constraints and backends that implements the algorithm, consult reference documentation of the following functions:
| Function | Description |
|---|---|
| vpiInitStereoDisparityEstimatorCreationParams | Initializes VPIStereoDisparityEstimatorCreationParams with default values. |
| vpiCreateStereoDisparityEstimator | Creates payload for vpiSubmitStereoDisparityEstimator. |
| vpiInitStereoDisparityEstimatorParams | Initializes VPIStereoDisparityEstimatorParams with default values. |
| vpiSubmitStereoDisparityEstimator | Runs stereo processing on a pair of images and outputs a disparity map. |
Usage
Language:- Import VPI module import vpi
- Estimate the disparity between left and right input VPI images, using 5x5 window and 64 maximum disparity. Optionally, the resulting disparity image is converted to U8, with range [0,255], suited for display. with vpi.Backend.CUDA:output = vpi.stereodisp(left, right, window=5, maxdisp=64) \.convert(vpi.Format.U8, scale=1.0/(32*64)*255)
- Initialization phase
- Include the header that defines the needed functions and structures. ColorImageFormat algorithm will be needed to process the disparity output for display. #include <vpi/algo/ConvertImageFormat.h>#include <vpi/algo/StereoDisparity.h>Declares functions that handle image format conversion.Declares functions that implement stereo disparity estimation algorithms.
- Define the input rectified stereo pair.
- Create the output disparity and confidence images, and the image used for disparity display (optional). int32_t w, h;vpiImageGetSize(left, &w, &h);VPIImage disparity;vpiImageCreate(w, h, VPI_IMAGE_FORMAT_S16, 0, &disparity);VPIImage confidence;vpiImageCreate(w, h, VPI_IMAGE_FORMAT_U16, 0, &confidence);VPIImage display;vpiImageCreate(w, h, VPI_IMAGE_FORMAT_U8, 0, &display);#define VPI_IMAGE_FORMAT_U16Single plane with one 16-bit unsigned integer channel.Definition: ImageFormat.h:111#define VPI_IMAGE_FORMAT_S16Single plane with one 16-bit signed integer channel.Definition: ImageFormat.h:120#define VPI_IMAGE_FORMAT_U8Single plane with one 8-bit unsigned integer channel.Definition: ImageFormat.h:100VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)Create an empty image instance with the specified flags.VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)Get the image dimensions in pixels.
- Create the payload that will contain all temporary buffers needed for processing. It'll be created on the CUDA backend. VPIPayload stereo;VPIStatus vpiCreateStereoDisparityEstimator(uint64_t backends, int32_t imageWidth, int32_t imageHeight, VPIImageFormat inputFormat, const VPIStereoDisparityEstimatorCreationParams *params, VPIPayload *payload)Creates payload for vpiSubmitStereoDisparityEstimator.
- Create the stream where the algorithm will be submitted for execution. VPIStream stream;vpiStreamCreate(0, &stream);VPIStatus vpiStreamCreate(uint64_t flags, VPIStream *stream)Create a stream instance.
- Include the header that defines the needed functions and structures. ColorImageFormat algorithm will be needed to process the disparity output for display.
- Processing phase
- Define the configuration parameters needed for algorithm execution. vpiInitStereoDisparityEstimatorParams(¶ms);params.windowSize = 5;params.maxDisparity = 64;int32_t windowSizeRepresents the median filter size on OFA+PVA+VIC backend or census transform window size (other backe...Definition: StereoDisparity.h:233VPIStatus vpiInitStereoDisparityEstimatorParams(VPIStereoDisparityEstimatorParams *params)Initializes VPIStereoDisparityEstimatorParams with default values.Structure that defines the parameters for vpiSubmitStereoDisparityEstimator.Definition: StereoDisparity.h:227
- Submit the payload for execution on the backend associated with it. vpiSubmitStereoDisparityEstimator(stream, VPI_BACKEND_CUDA, stereo, left, right, disparity, confidence, ¶ms);VPIStatus vpiSubmitStereoDisparityEstimator(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage left, VPIImage right, VPIImage disparity, VPIImage confidenceMap, const VPIStereoDisparityEstimatorParams *params)Runs stereo processing on a pair of images and outputs a disparity map.
- Optionally, the resulting disparity image can be converted to U8 format and the disparity values are rescaled to fit in [0,255] range, suited for display. VPIConvertImageFormatParams cvtParams;vpiInitConvertImageFormatParams(&cvtParams);cvtParams.scale = 1.0f / (32 * params.maxDisparity) * 255;vpiSubmitConvertImageFormat(stream, VPI_BACKEND_CUDA, disparity, display, &cvtParams);VPIStatus vpiInitConvertImageFormatParams(VPIConvertImageFormatParams *params)Initialize VPIConvertImageFormatParams with default values.VPIStatus vpiSubmitConvertImageFormat(VPIStream stream, uint64_t backend, VPIImage input, VPIImage output, const VPIConvertImageFormatParams *params)Converts the image contents to the desired format, with optional scaling and offset.Parameters for customizing image format conversion.Definition: ConvertImageFormat.h:86
- Wait until the processing is done. vpiStreamSync(stream);VPIStatus vpiStreamSync(VPIStream stream)Blocks the calling thread until all submitted commands in this stream queue are done (queue is empty)...
- Define the configuration parameters needed for algorithm execution.
- Cleanup phase
- Free resources held by the stream, the payload and the input and ouput images. vpiStreamDestroy(stream);vpiPayloadDestroy(stereo);vpiImageDestroy(left);vpiImageDestroy(right);vpiImageDestroy(display);vpiImageDestroy(disparity);vpiImageDestroy(confidence);void vpiPayloadDestroy(VPIPayload payload)Deallocates the payload object and all associated resources.void vpiStreamDestroy(VPIStream stream)Destroy a stream instance and deallocate all HW resources.
- Free resources held by the stream, the payload and the input and ouput images.
Consult the Stereo Disparity Sample for a complete example.
For more information, see Stereo Disparity Estimator in the "C API Reference" section of VPI - Vision Programming Interface.
Performance
For information on how to use the performance table below, see Algorithm Performance Tables.
Before comparing measurements, consult Comparing Algorithm Elapsed Times.
For further information on how performance was benchmarked, see Performance Benchmark.