Multi-Process Service
The Multi-Process Service (MPS) is an alternative, binary-compatible implementation of the CUDA Application Programming Interface (API). The MPS runtime architecture is designed to transparently enable co-operative multi-process CUDA applications, typically MPI jobs, to utilize Hyper-Q capabilities on the latest NVIDIA (Kepler-based) Tesla and Quadro GPUs.
1. Introduction#
1.1. At a Glance#
1.1.1. MPS#
The Multi-Process Service (MPS) is an alternative, binary-compatible implementation of the CUDA Application Programming Interface (API). The MPS runtime architecture is designed to transparently enable cooperative multi-process CUDA applications, typically MPI jobs, to utilize Hyper-Q capabilities on the latest NVIDIA (Kepler and later) GPUs. Hyper-Q allows CUDA kernels to be processed concurrently on the same GPU; this can benefit performance when the GPU compute capacity is underutilized by a single application process.
1.1.2. Volta MPS#
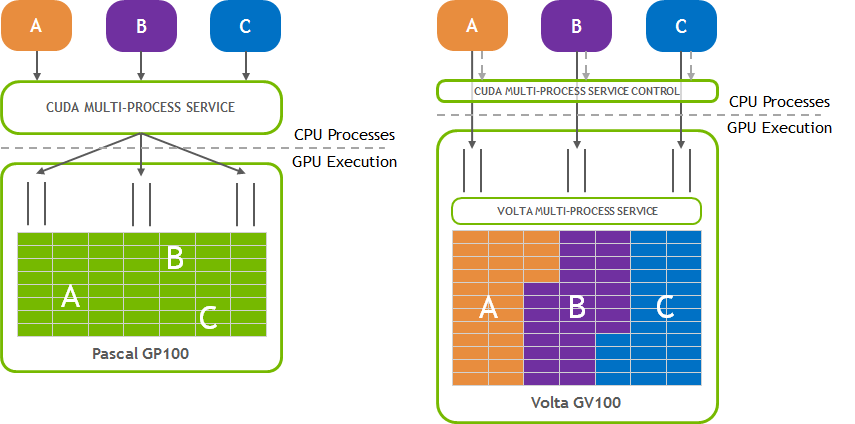
The Volta architecture introduced new MPS capabilities. Compared to MPS on pre-Volta GPUs, Volta MPS provides a few key improvements:
Volta MPS clients submit work directly to the GPU without passing through the MPS server.
Each Volta MPS client owns its own GPU address space instead of sharing GPU address space with all other MPS clients.
Volta MPS supports limited execution resource provisioning for Quality of Service (QoS).
This document will introduce the new capabilities and note the differences between Volta MPS and MPS on pre-Volta GPUs. Running MPS on Volta will automatically enable the new capabilities.
1.1.3. Intended Audience#
This document is a comprehensive guide to MPS capabilities and usage. It is intended to be read by application developers and users who will be running GPU calculations and intend to achieve the greatest level of execution performance. It is also intended to be read by system administrators who will be enabling the MPS capability in a user-friendly way, typically on multi-node clusters.
1.1.4. Organization of This Document#
The order of the presentation is as follows:
Introduction and Concepts – describes why MPS is needed and how it enables Hyper-Q for multi-process applications.
When to Use MPS – describes what factors to consider when choosing to run an application with or choosing to deploy MPS for your users.
Architecture – describes the client-server architecture of MPS in detail and how it multiplexes clients onto the GPU.
Appendices – Reference information for the tools and interfaces used by the MPS system and guidance for common use-cases.
1.2. Prerequisites#
Portions of this document assume that you are already familiar with:
the structure of CUDA applications and how they utilize the GPU via the CUDA Runtime and CUDA Driver software libraries
concepts of modern operating systems, such as how processes and threads are scheduled and how inter-process communication typically works
the Linux command-line shell environment
configuring and running MPI programs via a command-line interface
1.3. Concepts#
1.3.1. Why MPS is Needed#
To balance workloads between CPU and GPU tasks, MPI processes are often allocated individual CPU cores in a multi-core CPU machine to provide CPU-core parallelization of potential Amdahl bottlenecks. As a result, the amount of work each individual MPI process is assigned may underutilize the GPU when the MPI process is accelerated using CUDA kernels. While each MPI process may end up running faster, the GPU is being used inefficiently. The Multi-Process Service takes advantage of the inter-MPI rank parallelism, increasing the overall GPU utilization.
1.3.2. What MPS Is#
MPS is a binary-compatible client-server runtime implementation of the CUDA API which consists of several components:
Control Daemon Process – The control daemon is responsible for starting and stopping the server, as well as coordinating connections between clients and servers.
Client Runtime – The MPS client runtime is built into the CUDA Driver library and may be used transparently by any CUDA application.
Server Process – The server is the clients’ shared connection to the GPU and provides concurrency between clients.
1.4. See Also#
Manpage for
nvidia-cuda-mps-control (1)Manpage for
nvidia-smi (1)
2. When to Use MPS#
2.1. The Benefits of MPS#
2.1.1. GPU Utilization#
A single process may not utilize all the compute and memory-bandwidth capacity available on the GPU. MPS allows kernel and memcopy operations from different processes to overlap on the GPU, achieving higher utilization and shorter running times.
2.1.2. Reduced On-GPU Context Storage#
Without MPS, each CUDA processes using a GPU allocates separate storage and scheduling resources on the GPU. In contrast, the MPS server allocates one copy of GPU storage and scheduling resources shared by all its clients. Volta MPS supports increased isolation between MPS clients, so the resource reduction is to a much lesser degree.
2.1.3. Reduced GPU Context Switching#
Without MPS, when processes share the GPU their scheduling resources must be swapped on and off the GPU. The MPS server shares one set of scheduling resources between all of its clients, eliminating the overhead of swapping when the GPU is scheduling between those clients.
2.2. Identifying Candidate Applications#
MPS is useful when each application process does not generate enough work to saturate the GPU. Multiple processes can be run per node using MPS to enable more concurrency. Applications like this are identified by having a small number of blocks-per-grid.
Further, if the application shows a low GPU occupancy because of a small number of threads-per-grid, performance improvements may be achievable with MPS.Using fewer blocks-per-grid in the kernel invocation and more threads-per-block to increase the occupancy per block is recommended. MPS allows the leftover GPU capacity to be occupied with CUDA kernels running from other processes.
These cases arise in strong-scaling situations, where the compute capacity (node, CPU core and/or GPU count) is increased while the problem size is held fixed. Though the total amount of computation work stays the same, the work per process decreases and may underutilize the available compute capacity while the application is running. With MPS, the GPU will allow kernel launches from different processes to run concurrently and remove an unnecessary point of serialization from the computation.
2.3. Considerations#
2.3.1. System Considerations#
2.3.1.1. Limitations#
MPS is only supported on the Linux and QNX operating systems. The MPS server will fail to start when launched on an operating system other than Linux.
Only Volta MPS is supported on Tegra platforms.
MPS requires a GPU with compute capability version 3.5 or higher. The MPS server will fail to start if one of the GPUs visible after applying
CUDA_VISIBLE_DEVICESis not of compute capability 3.5 or higher.The Unified Virtual Addressing (UVA) feature of CUDA must be available, which is the default for any 64-bit CUDA program running on a GPU with compute capability version 2.0 or higher. If UVA is unavailable, the MPS server will fail to start.
The amount of page-locked host memory that can be allocated by MPS clients is limited by the size of the tmpfs filesystem (
/dev/shmfor Linux and/dev/shmemfor QNX).Exclusive-mode restrictions are applied to the MPS server, not MPS clients. GPU compute modes are not supported on Tegra platforms.
Only one user on a system may have an active MPS server.
The MPS control daemon will queue MPS server activation requests from separate users, leading to serialized exclusive access of the GPU between users regardless of GPU exclusivity settings.
All MPS client behavior will be attributed to the MPS server process by system monitoring and accounting tools (for example,
nvidia-smi, NVML API).
2.3.1.2. GPU Compute Modes#
Three Compute Modes are supported via settings accessible in nvidia-smi:
PROHIBITED– the GPU is not available for compute applications.EXCLUSIVE_PROCESS— the GPU is assigned to only one process at a time, and individual process threads may submit work to the GPU concurrently.DEFAULT– multiple processes can use the GPU simultaneously. Individual threads of each process may submit work to the GPU simultaneously.
Using MPS effectively causes EXCLUSIVE_PROCESS mode to behave like DEFAULT mode
for all MPS clients. MPS will always allow multiple clients to use the GPU via the MPS server.
When using MPS it is recommended to use EXCLUSIVE_PROCESS mode to ensure that
only a single MPS server is using the GPU, which provides additional insurance that the
MPS server is the single point of arbitration between all CUDA processes for that GPU.
2.3.2. Application Considerations#
The NVIDIA Codec SDK: https://developer.nvidia.com/nvidia-video-codec-sdk is not supported under MPS on pre-Volta MPS clients.
Only 64-bit applications are supported. The MPS server will fail to start if the CUDA application is not 64-bit. The MPS client will fail CUDA initialization.
If an application uses the CUDA driver API, then it must use headers from CUDA 4.0 or later (that is, it must not have been built by setting
CUDA_FORCE_API_VERSIONto an earlier version). Context creation in the client will fail if the context version is older than 4.0.Dynamic parallelism is not supported. CUDA module load will fail if the module uses dynamic parallelism features.
MPS server only supports clients running with the same UID as the server. The client application will fail to initialize if the server is not running with the same UID. Volta MPS may be launched in
-multiuser-servermode to allow clients under different UIDs to connect to a single MPS server launched under the root user while dropping isolation between users. Refer to Server for details regarding-multiuser-servermode.Stream callbacks are not supported on pre-Volta MPS clients. Calling any stream callback APIs will return an error.
CUDA graphs with host nodes are not supported under MPS on pre-Volta MPS clients.
The amount of page-locked host memory that pre-Volta MPS client applications can allocate is limited by the size of the tmpfs filesystem (
/dev/shmfor Linux and/dev/shmemfor QNX). Attempting to allocate more page-locked memory than the allowed size using any of relevant CUDA APIs will fail.Terminating an MPS client without synchronizing with all outstanding GPU work (via Ctrl-C / program exception such as segfault / signals, etc.) can leave the MPS server and other MPS clients in an undefined state, which may result in hangs, unexpected failures, or corruptions.
CUDA IPC between CUDA contexts which are created by processes running as MPS clients and CUDA contexts which are created by processes not running as MPS clients is supported under Volta MPS. CUDA IPC is not supported on Tegra platforms.
Launching cooperative group kernel with MPS is not supported on Tegra platforms.
2.3.3. Memory Protection and Error Containment#
MPS is only recommended for running cooperative processes effectively acting as a single application, such as multiple ranks of the same MPI job, such that the severity of the following memory protection and error containment limitations is acceptable.
2.3.3.1. Memory Protection#
Volta MPS client processes have fully isolated GPU address spaces.
Pre-Volta MPS client processes allocate memory from different partitions of the same GPU virtual address space. As a result:
An out-of-range write in a CUDA Kernel can modify the CUDA-accessible memory state of another process and will not trigger an error.
An out-of-range read in a CUDA Kernel can access CUDA-accessible memory modified by another process, and will not trigger an error, leading to undefined behavior.
This pre-Volta MPS behavior is constrained to memory accesses from pointers within
CUDA Kernels. Any CUDA API restricts MPS clients from accessing any resources
outside of that MPS Client’s memory partition. For example, it is not possible to
overwrite another MPS client’s memory using the cudaMemcpy() API.
2.3.3.2. Error Containment#
Volta MPS supports limited error containment:
A fatal GPU fault generated by a Volta MPS client process will be contained within the subset of GPUs shared between all clients with the fatal fault-causing GPU.
A fatal GPU fault generated by a Volta MPS client process will be reported to all the clients running on the subset of GPUs in which the fatal fault is contained, without indicating which client generated the error. Note that it is the responsibility of the affected clients to exit after being informed of the fatal GPU fault.
Clients running on other GPUs remain unaffected by the fatal fault and will run as normal until completion.
Once a fatal fault is observed, the MPS server will wait for all the clients associated with the affected GPUs to exit, prohibiting new client connecting to those GPUs from joining. The status of the MPS server changes from
ACTIVEtoFAULT. When all the existing clients associated with the affected GPUs have exited, the MPS server will recreate the GPU contexts on the affected GPUs and resume processing client requests to those GPUs. The MPS server status changes back toACTIVE, indicating that it is able to process new clients.
For example, if your system has devices 0, 1, and 2, and if there are four clients client A, client B, client C, and client D connected to the MPS server: client A runs on device 0, client B runs on device 0 and 1, client C runs on device 1, client D runs on device 2. If client A triggers a fatal GPU fault:
Since device 0 and device 1 share a comment client, client B, the fatal GPU fault is contained within device 0 and 1.
The fatal GPU fault will be reported to all the clients running on device 0 and 1, that is, client A, client B, and client C.
Client D running on device 2 remain unaffected by the fatal fault and continue to run as normal.
The MPS server will wait for client A, client B, and client C to exit and reject any new client requests will be rejected with error
CUDA_ERROR_MPS_SERVER_NOT_READYwhile the server status isFAULT. After client A, client B, and client C have exited, the server recreates the GPU contexts on device 0 and device 1 and then resumes accepting client requests on all devices. The server status becomesACTIVEagain.
Information about the fatal GPU fault containment will be logged, including:
If the fatal GPU fault is a fatal memory fault, the PID of the client which triggered the fatal GPU memory fault.
The device IDs of the devices which are affected by this fatal GPU fault.
The PIDs of the clients which are affected by this fatal GPU fault. The status of each affected client becomes
INACTIVEand the status of the MPS server becomesFAULT.The messages indicating the successful recreation of the affected devices after all the affected clients have exited.
Pre-Volta MPS client processes share on-GPU scheduling and error reporting resources. As a result:
A GPU fault generated by any client will be reported to all clients, without indicating which client generated the error.
A fatal GPU fault triggered by one client will terminate the MPS server and the GPU activity of all clients.
CUDA API errors generated on the CPU in the CUDA Runtime or CUDA Driver are delivered only to the calling client.
2.3.4. MPS on Multi-GPU Systems#
The MPS server supports using multiple GPUs. On systems with more than one GPU,
you can use CUDA_VISIBLE_DEVICES to enumerate the GPUs you would like to use. Refer to
Environment Variables for more details.
On systems with a mix of Volta / pre-Volta GPUs, if the MPS server is set to enumerate any Volta GPU, it will discard all pre-Volta GPUs. In other words, the MPS server will either operate only on the Volta GPUs and expose Volta capabilities or operate only on pre-Volta GPUs.
2.3.5. Performance#
2.3.5.1. Client-Server Connection Limits#
The pre-Volta MPS Server supports up to 16 client CUDA contexts per-device
concurrently. Volta MPS server supports 48 client CUDA contexts per-device. These
contexts may be distributed over multiple processes. If the connection limit is exceeded,
the CUDA application will fail to create a CUDA Context and return an API error from
cuCtxCreate() or the first CUDA Runtime API call that triggers context creation. Failed
connection attempts will be logged by the MPS server.
2.3.5.2. Volta MPS Execution Resource Provisioning#
Volta MPS supports limited execution resource provisioning. The client contexts can be set to only use a portion of the available threads. The provisioning capability is commonly used to achieve two goals:
Reduce client memory footprint: Since each MPS client process has fully isolated address space, each client context allocates independent context storage and scheduling resources. Those resources scale with the amount of threads available to the client. By default, each MPS client has all available threads useable. As MPS is usually used with multiple processes running simultaneously, making all threads accessible to every client is often unnecessary, and therefore wasteful to allocate full context storage. Reducing the number of threads available will effectively reduce the context storage allocation size.
Improve QoS: The provisioning mechanism can be used as a classic QoS mechanism to limit available compute bandwidth. Reducing the portion of available threads will also concentrate the work submitted by a client to a set of SMs, reducing destructive interference with other clients’ submitted work.
Setting the limit does not reserve dedicated resources for any MPS client context. It simply limits how much resources can be used by a client context. Kernels launched from different MPS client contexts may execute on the same SM, depending on load-balancing.
By default, each client is provisioned to have access to all available threads. This will
allow the maximum degree of scheduling freedom, but at a cost of higher memory
footprint due to wasted execution resource allocation. The memory usage of each client
process can be queried through nvidia-smi.
The provisioning limit can be set via a few different mechanisms for different effects. These mechanisms are categorized into two mechanisms: active thread percentage and programmatic interface. In particular, partitioning via active thread percentage are categorized into two strategies: uniform partitioning and non-uniform partitioning.
The limit constrained by the uniform active thread percentage is configured for a client
process when it starts and cannot be changed for the client process afterwards. The
executed limit is reflected through device attribute
cudaDevAttrMultiProcessorCount whose value remains unchanged throughout
the client process.
The MPS control utility provides 2 sets of commands to set/query the limit of all future MPS clients. Refer to nvidia-cuda-mps-control for more details.
Alternatively, the limit for all future MPS clients can be set by setting the environment variable
CUDA_MPS_ACTIVE_THREAD_PERCENTAGEfor the MPS control process. Refer to MPS Control Daemon Level for more details.The limit can be further constrained for new clients by solely setting the environment variable
CUDA_MPS_ACTIVE_THREAD_PERCENTAGEfor a client process. Refer to Client Process Level for more details.
The limit constrained by the non-uniform active thread percentage is configured for
every client CUDA context and can be changed throughout the client process. The
executed limit is reflected through device attribute
cudaDevAttrMultiProcessorCount whose value returns the portion of available
threads that can be used by the client CUDA context current to the calling thread.
The limit constrained by the uniform partitioning mechanisms can be further constrained for new client CUDA contexts by setting the environment variable
CUDA_MPS_ACTIVE_THREAD_PERCENTAGEin conjunction with the environment variableCUDA_MPS_ENABLE_PER_CTX_DEVICE_MULTIPROCESSOR_PARTITIONING. Refer to Client CUDA Context Level and CUDA_MPS_ENABLE_PER_CTX_DEVICE_MULTIPROCESSOR_PARTITIONING for more details.
The limit constrained by the programmatic partitioning is configured for a client CUDA
context created via cuCtxCreate_v3() with the execution affinity CUexecAffinityParam
which specifies the number of SMs that the context is limited to use. The executed limit
of the context can be queried through cuCtxGetExecAffinity(). Refer to Best Practice for SM Partitioning for more details.
A common provisioning strategy is to uniformly partition the available threads equally to each MPS client processes (i.e., set active thread percentage to 100% / n, for n expected MPS client processes). This strategy will allocate close to the minimum amount of execution resources, but it could restrict performance for clients that could occasionally make use of idle resources.
A more optimal strategy is to uniformly partition the portion by half of the number of expected clients (i.e., set active thread percentage to 100% / 0.5n) to give the load balancer more freedom to overlap execution between clients when there are idle resources.
The near optimal provision strategy is to non-uniformly partition the available threads based on the workloads of each MPS clients (i.e., set active thread percentage to 30% for client 1 and set active thread percentage to 70 % client 2 if the ratio of the client 1 workload and the client2 workload is 30%: 70%). This strategy will concentrate the work submitted by different clients to disjoint sets of the SMs and effectively minimize the interference between work submissions by different clients.
The most optimal provision strategy is to precisely limit the number of SMs to use for each MPS clients knowing the execution resource requirements of each client (i.e., 24 SMs for client1 and 60 SMs for client 2 on a device with 84 SMs). This strategy provides finer grained and more flexible control over the set of SMs the work will be running on than the active thread percentage.
If the active thread percentage is used for partitioning, the limit will be internally rounded down to the nearest hardware supported thread count limit. If the programmatic interface is used for partitioning, the limit will be internally rounded up to the nearest hardware supported SM count limit.
2.3.5.3. Threads and Linux Scheduling#
On pre-Volta GPUs, launching more MPS clients than there are available logical cores on
your machine will incur increased launch latency and will generally slow down client-server
communication due to how the threads get scheduled by the Linux CFS
(Completely Fair Scheduler). For setups where multiple GPUs are used with an MPS
control daemon and server started per GPU, we recommend pinning each MPS server to
a distinct core. This can be accomplished by using the utility taskset, which allows
binding a running program to multiple cores or launching a new one on them. To
accomplish this with MPS, launch the control daemon bound to a specific core, for example,
taskset -c 0 nvidia-cuda-mps-control -d. The process affinity will be inherited by the
MPS server when it starts up.
2.3.5.4. Volta MPS Device Memory Limit#
On Volta MPS, users can enforce clients to adhere to allocate device memory up to a
preset limit. This mechanism provides a facility to fractionalize GPU memory across
MPS clients that run on the specific GPU, which enables scheduling and deployment
systems to make decisions based on the memory usage for the clients. If a client attempts
to allocate memory beyond the preset limit, the cuda memory allocation calls will return
out of memory error. The memory limit specific will also account for CUDA internal
device allocations which will help users make scheduling decisions for optimal GPU
utilization. This can be accomplished through a hierarchy of control mechanisms for
users to limit the pinned device memory on MPS clients. The default limit setting
would enforce a device memory limit on all the MPS clients of all future MPS Servers
spawned. The per server limit setting allows finer grained control on the memory
resource limit whereby users have the option to set memory limit selectively using the
server PID and thus all clients of the server. Additionally, MPS clients can further
constrain the memory limit setting from the server by using the
CUDA_MPS_PINNED_DEVICE_MEM_LIMIT environment variable.
2.3.6. Interaction with Tools#
2.3.6.1. Debugging and CUDA-GDB#
On Volta MPS, GPU coredumps can be generated and debugged using CUDA-GDB. Refer to CUDA-GDB documentation <https://docs.nvidia.com/cuda/cuda-gdb/index.html>`__ for usage instructions.
Under certain conditions applications invoked from within CUDA-GDB (or any CUDA-compatible debugger, such as Allinea DDT) may be automatically run without using MPS, even when MPS automatic provisioning is active. To take advantage of this automatic fallback, no other MPS client applications may be running at the time. This enables debugging of CUDA applications without modifying the MPS configuration for the system.
Here’s how it works:
CUDA-GDB attempts to run an application and recognizes that it will become an MPS client.
The application running under CUDA-GDB blocks in
cuInit()and waits for all of the active MPS client processes to exit, if any are running.Once all client processes have terminated, the MPS server will allow CUDA-GDB and the application being debugged to continue.
Any new client processes attempt to connect to the MPS daemon will be provisioned a server normally.
2.3.6.2. memcheck#
The memcheck tool is supported on MPS. Refer to the memcheck
documentation for usage instructions.
2.3.6.3. Profiling#
CUDA profiling tools (such as nvprof and Nvidia Visual Profiler) and CUPTI-based profilers are supported under MPS.
Refer to Migrating to Nsight Tools from Visual Profiler and nvprof for more details.
2.3.7. Client Early Termination#
Terminating an MPS client via CTRL-C or signals is not supported and will lead to
undefined behavior. The user must guarantee that the MPS client is idle, by calling
either cudaDeviceSynchronize or cudaStreamSynchronize on all streams, before the
MPS client can be terminated. Early termination of a MPS client without synchronizing
all outstanding GPU work may leave the MPS server in an undefined state and result in
unexpected failures, corruptions, or hangs; as a result, the affected MPS server and all its
clients must be restarted.
On Volta MPS, user can instruct the MPS server to terminate the CUDA contexts of an
MPS client process, regardless of whether the CUDA contexts are idle or not, by using
the control command terminate_client <server PID> <client PID>. This mechanism
enables user to terminate the CUDA contexts of a given MPS client process, even when
the CUDA contexts are non-idle, without affecting the MPS server or its other MPS
clients. The control command terminate_client sends a request to the MPS server which
terminates the CUDA contexts of the target MPS client process on behalf of the user and
returns after the MPS server has completed the request. The return value is
CUDA_SUCCESS if the CUDA contexts of the target MPS client process have been
successfully terminated; otherwise, a CUDA error describing the failure state. When the
MPS server starts handling the request, each MPS client context running in the target
MPS client process becomes INACTIVE; the status changes will be logged by the MPS
server. Upon successful completion of the client termination, the target MPS client
process will observe a sticky error CUDA_ERROR_MPS_CLIENT_TERMINATED, and
it becomes safe to kill the target MPS client process with signals such as SIGKILL
without affecting the rest of the MPS server and its MPS clients. Note that the MPS
server is not responsible for killing the target MPS client process after the sticky error is
set because the target MPS client process might want to:
Perform clean-up of its GPU or CPU state. This may include a device reset. Continue remaining CPU work.
Continue remaining CPU work.
If the user wants to terminate the GPU work of a MPS client process that is running inside a PID namespace different from the MPS control’s PID namespace, such as an MPS client process inside a container, the user must use the PID of the target MPS client process translated into the MPS control’s PID namespace. For example, the PID of an MPS client process inside the container is 6, and the PID of this MPS client process in the host PID namespace is 1024; the user must use 1024 to terminate the GPU work of the target MPS client process.
The common workflow for terminating the client application nbody:
Use the control command ps to get the status of the current active MPS clients.
$ echo "ps" | nvidia-cuda-mps-control
PID ID SERVER DEVICE NAMESPACE COMMAND
9741 0 6472 GPU-cb1213a3-d6a4-be7f 4026531836 ./nbody
9743 0 6472 GPU-cb1213a3-d6a4-be7f 4026531836 ./matrixMul
Terminate using the PID of nbody in the host PID namespace as reported by ps:
$ echo "terminate_client 6472 9741" | nvidia-cuda-mps-control
#wait until terminate_client to return
#upon successful termination 0 is returned
0
Now it is safe to kill nbody:
$ kill -9 9741
MPS client termination is not supported on Tegra platforms.
2.3.8. Client Priority Level Control#
Users are normally only able to control the GPU priority level of their kernels by using
the cudaStreamCreateWithPriority() API while the program is being written. On Volta
MPS, the user can use the control command set_default_client_priority <Priority Level>
to map the stream priorities of a given client to a different range of internal
CUDA priorities. Changes to this setting do not take effect until the next client
connection to the server is opened. The user can also set the
CUDA_MPS_CLIENT_PRIORITY environment variable before starting the control
daemon or any given client process to set this value.
In this release, the allowed priority level values are 0 (normal) and 1 (below normal).
Lower numbers map to higher priorities to match the behavior of the Linux kernel scheduler.
Note
CUDA priority levels are not guarantees of execution order–they are only a performance hint to the CUDA Driver.
For example:
Process A is launched at Normal priority and only uses the default CUDA Stream, which has the lowest priority of 0.
Process B is launched at Below Normal priority and uses streams with custom Stream priority values, such as -3.
Without this feature, the streams from Process B would be executed first by the CUDA driver. However, with the Client Priority Level feature, the streams from Process A will take precedence.
3. Architecture#
3.1. Background#
CUDA is a general purpose parallel computing platform and programming model that leverages the parallel compute engine in NVIDIA GPUs to solve many complex computational problems in a more efficient way than on a CPU.
A CUDA program starts by creating a CUDA context, either explicitly using the driver API or implicitly using the runtime API, for a specific GPU. The context encapsulates all the hardware resources necessary for the program to be able to manage memory and launch work on that GPU.
Launching work on the GPU typically involves copying data over to previously allocated regions in GPU memory, running a CUDA kernel that operates on that data, and then copying the results back from GPU memory into system memory. A CUDA kernel consists of a hierarchy of thread groups that execute in parallel on the GPU’s compute engine.
All work on the GPU launched using CUDA is launched either explicitly into a CUDA stream, or implicitly using a default stream. A stream is a software abstraction that represents a sequence of commands, which may be a mix of kernels, copies, and other commands, that execute in order. Work launched in two different streams can execute simultaneously, allowing for coarse grained parallelism.
CUDA streams are aliased onto one or more ‘work queues’ on the GPU by the driver. Work queues are hardware resources that represent an in-order sequence of the subset of commands in a stream to be executed by a specific engine on the GPU, such as the kernel executions or memory copies. GPUs with Hyper-Q have a concurrent scheduler to schedule work from work queues belonging to a single CUDA context. Work launched to the compute engine from work queues belonging to the same CUDA context can execute concurrently on the GPU.
The GPU also has a time sliced scheduler to schedule work from work queues belonging to different CUDA contexts. Work launched to the compute engine from work queues belonging to different CUDA contexts cannot execute concurrently. This can cause underutilization of the GPU’s compute resources if work launched from a single CUDA context is not sufficient to use up all resource available to it.
Additionally, within the software layer, to receive asynchronous notifications from the OS and perform asynchronous CPU work on behalf of the application the CUDA driver may create internal threads: an upcall handler thread and potentially a user callback executor thread.
3.2. Client-server Architecture#
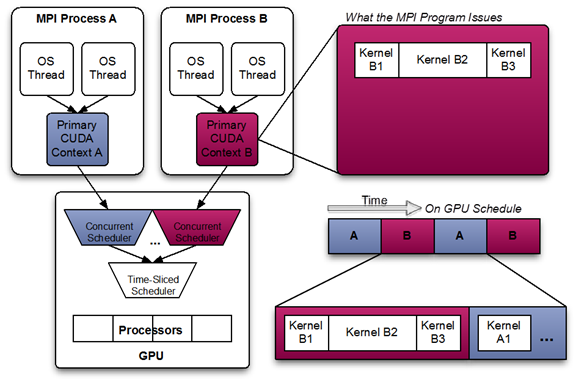
This diagram shows a likely schedule of CUDA kernels when running an MPI application consisting of multiple OS processes without MPS. Note that while the CUDA kernels from within each MPI process may be scheduled concurrently, each MPI process is assigned a serially scheduled time-slice on the whole GPU.
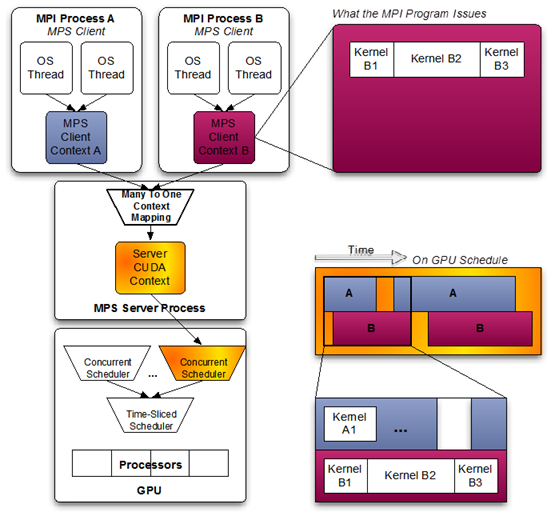
When using pre-Volta MPS, the server manages the hardware resources associated with a single CUDA context. The CUDA contexts belonging to MPS clients funnel their work through the MPS server. This allows the client CUDA contexts to bypass the hardware limitations associated with time sliced scheduling, and permit their CUDA kernels execute simultaneously.
Volta provides new hardware capabilities to reduce the types of hardware resources the MPS server must managed. A client CUDA context manages most of the hardware resources on Volta, and submits work to the hardware directly. The Volta MPS server mediates the remaining shared resources required to ensure simultaneous scheduling of work submitted by individual clients, and stays out of the critical execution path.
The communication between the MPS client and the MPS server is entirely encapsulated within the CUDA driver behind the CUDA API. As a result, MPS is transparent to the MPI program.
MPS clients CUDA contexts retain their upcall handler thread and any asynchronous executor threads. The MPS server creates an additional upcall handler thread and creates a worker thread for each client.
3.3. Provisioning Sequence#
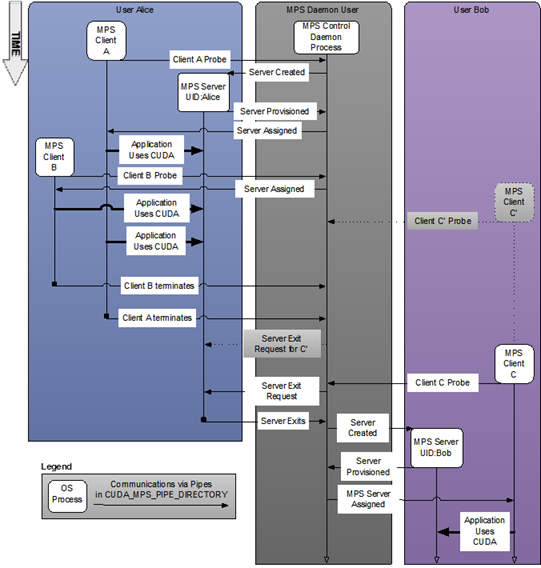
Figure 1 System-wide provisioning with multiple users.#
3.3.1. Server#
The MPS control daemon is responsible for the startup and shutdown of MPS servers. The control daemon allows at most one MPS server to be active at a time. When an MPS client connects to the control daemon, the daemon launches an MPS server if there is no server active. The MPS server is launched with the same user id as that of the MPS client.
If there is an MPS server already active and the user ID of the server and client match, then the control daemon allows the client to proceed to connect to the server. If there is an MPS server already active, but the server and client were launched with different user IDs, the control daemon requests the existing server to shutdown once all its clients have disconnected. Once the existing server has shutdown, the control daemon launches a new server with the same user ID as that of the new user’s client process. This is shown in the figure above where user Bob starts client C’ before a server is available. Only once user Alice’s clients exit is a server created for user Bob and client C’.
The MPS control daemon does not shutdown the active server if there are no pending client requests. This means that the active MPS server process will persist even if all active clients exit. The active server is shutdown when either a new MPS client, launched with a different user id than the active MPS server, connects to the control daemon or when the work launched by the clients has caused a fault. This is shown in the example above, where the control daemon issues a server exit request to Alice’s server only once user Bob starts client C, even though all of Alice’s clients have exited.
On Volta MPS, the restriction of one Linux user per MPS server may berelaxed to avoid
reprovisioning the MPS server on each new user request. Under this mode, clients from
all Linux users will appear as clients from the root user and connect to the root MPS
server. It is important to make sure that isolation between different users (including the
root user) can be safely disregarded before enabling this mode. Clients from all users
will share the same MPS log files. The same error containment rules (refer to Memory Protection and Error Containment) also
apply in this mode across clients from all users. For example, a fatal fault from one client
may bring down a different user’s client that shares any GPU with the faulting client. To
allow multiple Linux users share one MPS server, start the control daemon under
superuser with the -multiuser-server option. This option is not supported on Tegra platforms.
An MPS server may be in one of the following states: INITIALIZING, ACTIVE or
FAULT. The INITIALIZING state indicates that the MPS server is busy initializing
and the MPS control will hold the new client requests in its queue. The ACTIVE state
indicates the MPS server is able to process new client requests. The FAULT state
indicates that the MPS server is blocked on a fatal fault caused by a client. Any new
client requests will be rejected with error CUDA_ERROR_MPS_SERVER_NOT_READY.
A newly launched MPS server will be in the INITIALIZING state first. After successful
initialization, the MPS server goes into the ACTIVE state. When a client encounters a
fatal fault, the MPS server will transition from ACTIVE to FAULT. On pre-Volta MPS, the MPS
server shuts down after encountering a fatal fault. On Volta MPS, the MPS
server becomes ACTIVE again after all faulting clients have disconnected.
The control daemon executable also supports an interactive mode where a user with sufficient permissions can issue commands, for example to see the current list of servers and clients or startup and shutdown servers manually.
3.3.2. Client Attach/Detach#
When CUDA is first initialized in a program, the CUDA driver attempts to connect to the MPS control daemon. If the connection attempt fails, the program continues to run as it normally would without MPS. If however, the connection attempt succeeds, the MPS control daemon proceeds to ensure that an MPS server, launched with same user ID as that of the connecting client, is active before returning to the client. The MPS client then proceeds to connect to the server.
All communication between the MPS client, the MPS control daemon, and the MPS
server is done using named pipes and UNIX domain sockets. The MPS server launches a
worker thread to receive commands from the client. Successful client connection will be
logged by the MPS server as the client status becomes ACTIVE. Upon client process
exit, the server destroys any resources not explicitly freed by the client process and
terminates the worker thread. The client exit event will be logged by the MPS server.
4. Appendix: Tools and Interface Reference#
The following utility programs and environment variables are used to manage the MPS execution environment. They are described below, along with other relevant pieces of the standard CUDA programming environment.
4.1. Utilities and Daemons#
4.1.1. nvidia-cuda-mps-control#
Typically stored under /usr/bin on Linux and QNX systems and typically run with
superuser privileges, this control daemon is used to manage the nvidia-cuda-mps-server
described in the following section. These are the relevant use cases:
man nvidia-cuda-mps-control # Describes usage of this utility.
nvidia-cuda-mps-control -d # Start daemon in background process.
ps -ef | grep mps # Check if the MPS daemon is running, for Linux.
pidin | grep mps # See if the MPS daemon is running, for QNX.
echo quit | nvidia-cuda-mps-control # Shut the daemon down.
nvidia-cuda-mps-control -f # Start daemon in foreground.
nvidia-cuda-mps-control -v # Print version of control daemon executable (applicable on Tegra platforms only).
The control daemon creates a nvidia-cuda-mps-control.pid file that contains the
PID of the control daemon process in the CUDA_MPS_PIPE_DIRECTORY. When there
are multiple instances of the control daemon running in parallel, one can target a specific
instance by looking up its PID in the corresponding CUDA_MPS_PIPE_DIRECTORY. If
CUDA_MPS_PIPE_DIRECTORY is not set, the nvidia-cuda-mps-control.pid file
will be created at the default pipe directory at /tmp/nvidia-mps.
When used in interactive mode, the available commands are:
get_server_list– prints out a list of all PIDs of server instances.get_server_status <PID>– this will print out the status of the server with the given <PID>.start_server - uid <user id>– manually starts a new instance of nvidia-cuda-mps-server with the given user ID.get_client_list <PID>– lists the PIDs of client applications connected to a server instance assigned to the given PID.quit– terminates thenvidia-cuda-mps-controldaemon.
Commands available to Volta MPS control:
get_device_client_list [<PID>]– lists the devices and PIDs of client applications that enumerated this device. It optionally takes the server instance PID.set_default_active_thread_percentage <percentage>– overrides the default active thread percentage for MPS servers. If there is already a server spawned, this command will only affect the next server. The set value is lost if aquitcommand is executed. The default is 100.get_default_active_thread_percentage– queries the current default available thread percentage.set_active_thread_percentage <PID> <percentage>– overrides the active thread percentage for the MPS server instance of the given PID. All clients created with that server afterwards will observe the new limit. Existing clients are not affected.get_active_thread_percentage <PID>– queries the current available thread percentage of the MPS server instance of the given PID.set_default_device_pinned_mem_limit <dev> <value>– sets the default device pinned memory limit for each MPS client. If there is already a server spawned, this command will only affect the next server. The set value is lost if aquitcommand is executed. The dev argument may be a device UUID string or an integer ordinal. The value must be in the form of an integer followed by a qualifier, either “G” or “M” that specifies the value in Gigabyte or Megabyte respectively. For example, to set a limit of 10 gigabytes for device 0, use the following command:set_default_device_pinned_mem_limit 0 10GBy default, there is no memory limit set.
Note that for this command, the dev argument is not validated against available devices in the MPS server. Therefore, it is possible to set two memory limits for the same device: one by device UUID and another by ordinal. When an MPS server is started, whichever limit was set last will take effect. A limit set with an invalid device UUID or ordinal will be ignored when starting the MPS server.
get_default_device_pinned_mem_limit <dev>– queries the current default pinned memory limit for the device. Thedevargument may be device UUID string or an integer ordinal.Note that this command does not translate between device UUIDs or ordinals and will return the limit that was set for each device identifier via the
set_default_device_pinned_mem_limitcommand.set_device_pinned_mem_limit <PID> <dev> <value>- overrides the device pinned memory limit for MPS servers. This sets the device pinned memory limit for each client of MPS server instance of the given PID for the device dev. All clients created with that server afterwards will observe the new limit. Existing clients are not affected. Thedevargument may be a device UUID string or an integer ordinal. For example, to set a limit of 900MB for the server with pid 1024 for device 0, use the following command:set_device_pinned_mem_limit 1024 0 900Mget_device_pinned_mem_limit <PID> <dev>– queries the current device pinned memory limit of the MPS server instance of the given PID for the devicedev. Thedevargument may be a device UUID string or an integer ordinal.terminate_client <server PID> <client PID>– terminates all the outstanding GPU work of the MPS client process<client PID>running on the MPS server denoted by<server PID>. For example, to terminate the outstanding GPU work for an MPS client process with PID 1024 running on an MPS server with PID 123, use the following command:terminate_client 123 1024ps [-p PID]– reports a snapshot of the current client processes. It optionally takes the server instance PID. It displays the PID, the unique identifier assigned by the server, the partial UUID of the associated device, the PID of the connected server, the namespace PID, and the command line of the client.set_default_client_priority [priority]– sets the default client priority that will be used for new clients. The value is not applied to existing clients. Priority values should be considered as hints to the CUDA Driver, not guarantees. Allowed values are0 [NORMAL]and 1[BELOW NORMAL]. The set value is lost if aquitcommand is executed. The default is0 [NORMAL].get_default_client_priority– queries the current priority value that will be used for new clients.
4.1.2. nvidia-cuda-mps-server#
Typically stored under /usr/bin on Linux and QNX systems, this daemon is run under the
same $UID as the client application running on the node. The nvidia-cuda-mps-server
instances are created on-demand when client applications connect to the
control daemon. The server binary should not be invoked directly, and instead the
control daemon should be used to manage the startup and shutdown of servers.
The nvidia-cuda-mps-server process owns the CUDA context on the GPU and
uses it to execute GPU operations for its client application processes. Due to this, when
querying active processes via nvidia-smi (or any NVML-based application) nvidia-cuda-mps-server
will appear as the active CUDA process rather than any of the client processes.
The version of the nvidia-cuda-mps-server executable can be printed with:
nvidia-cuda-mps-server -v
4.1.3. nvidia-smi#
Typically stored under /usr/bin on Linux systems, this is used to configure GPUs on a
node. The following use cases are relevant to managing MPS:
man nvidia-smi # Describes usage of this utility.
nvidia-smi -L # List the GPU's on node.
nvidia-smi -q # List GPU state and configuration information.
nvidia-smi -q -d compute # Show the compute mode of each GPU.
nvidia-smi -i 0 -c EXCLUSIVE_PROCESS # Set GPU 0 to exclusive mode, run as root.
nvidia-smi -i 0 -c DEFAULT # Set GPU 0 to default mode, run as root. (SHARED_PROCESS)
nvidia-smi -i 0 -r # Reboot GPU 0 with the new setting.
4.2. Environment Variables#
4.2.1. CUDA_VISIBLE_DEVICES#
CUDA_VISIBLE_DEVICES is used to specify which GPU’s should be visible to a CUDA
application. Only the devices whose index or UUID is present in the sequence are visible
to CUDA applications and they are enumerated in the order of the sequence.
When CUDA_VISIBLE_DEVICES is set before launching the control daemon, the
devices will be remapped by the MPS server. This means that if your system has devices
0, 1 and 2, and if CUDA_VISIBLE_DEVICES is set to 0,2, then when a client connects
to the server it will see the remapped devices – device 0 and a device 1. Therefore,
keeping CUDA_VISIBLE_DEVICES set to 0,2 when launching the client would lead
to an error.
The MPS control daemon will further filter-out any pre-Volta devices, if any visible device is Volta+.
To avoid this ambiguity, we recommend using UUIDs instead of indices. These can be
viewed by launching nvidia-smi -q. When launching the server, or the application,
you can set CUDA_VISIBLE_DEVICES to UUID_1,UUID_2, where UUID_1 and
UUID_2 are the GPU UUIDs. It will also work when you specify the first few characters
of the UUID (including GPU-) rather than the full UUID.
The MPS server will fail to start if incompatible devices are visible after the application
of CUDA_VISIBLE_DEVICES.
4.2.2. CUDA_MPS_PIPE_DIRECTORY#
The MPS control daemon, the MPS server, and the associated MPS clients communicate
with each other via named pipes and UNIX domain sockets. The default directory for
these pipes and sockets is /tmp/nvidia-mps. The environment variable,
CUDA_MPS_PIPE_DIRECTORY, can be used to override the location of these pipes and
sockets. The value of this environment variable should be consistent across all MPS
clients sharing the same MPS server, and the MPS control daemon.
The recommended location for the directory containing these named pipes and domain
sockets is local folders such as /tmp. If the specified location exists in a shared, multi-node
filesystem, the path must be unique for each node to prevent multiple MPS servers
or MPS control daemons from using the same pipes and sockets. When provisioning
MPS on a per-user basis, the directory should be set to a location such that
different users will not end up using the same directory.
On Tegra platforms, there is no default directory setting for pipes and sockets. Users must set this environment variable such that only intended users have access to this location.
4.2.3. CUDA_MPS_LOG_DIRECTORY#
The MPS control daemon maintains a control.log file which contains the status of
its MPS servers, user commands issued and their result, and startup and shutdown
notices for the daemon. The MPS server maintains a server.log file containing its
startup and shutdown information and the status of its clients.
By default these log files are stored in the directory /var/log/nvidia-mps. The
CUDA_MPS_LOG_DIRECTORY environment variable can be used to override the default
value. This environment variable should be set in the MPS control daemon’s
environment and is automatically inherited by any MPS servers launched by that control daemon.
On Tegra platforms, there is no default directory setting for storing the log files. MPS will remain operational without the user setting this environment variable; however, in such instances, MPS logs will not be available. If logs are required to be captured, then the user must set this environment variable such that only intended users have access to this location.
4.2.4. CUDA_DEVICE_MAX_CONNECTIONS#
When encountered in the MPS client’s environment,
CUDA_DEVICE_MAX_CONNECTIONS sets the preferred number of compute and
copy engine concurrent connections (work queues) from the host to the device for that
client. The number actually allocated by the driver may differ from what is requested
based on hardware resource limitations or other considerations. Under MPS, each
server’s clients share one pool of connections, whereas without MPS each CUDA context
would be allocated its own separate connection pool. Volta MPS clients exclusively
owns the connections set aside for the client in the shared pool, so setting this
environment variable under Volta MPS may reduce the number of available clients. The
default value is 2 for Volta MPS clients.
4.2.5. CUDA_MPS_ACTIVE_THREAD_PERCENTAGE#
On Volta GPUs, this environment variable sets the portion of the available threads that can be used by the client contexts. The limit can be configured at different levels.
4.2.5.1. MPS Control Daemon Level#
Setting this environment variable in an MPS control’s environment will configure the default active thread percentage when the MPS control daemon starts.
All the MPS servers spawned by the MPS control daemon will observe this limit. Once the MPS control daemon has started, changing this environment variable cannot affect the MPS servers.
4.2.5.2. Client Process Level#
Setting this environment variable in an MPS client’s environment will configure the
active thread percentage when the client process starts. The new limit will only further
constrain the limit set by the control daemon (via set_default_active_thread_percentage
or set_active_thread_percentage control daemon commands or this environment
variable at the MPS control daemon level). If the control daemon has a lower setting, the
control daemon setting will be obeyed by the client process instead.
All the client CUDA contexts created within the client process will observe the new limit. Once the client process has started, changing the value of this environment variable cannot affect the client CUDA contexts.
4.2.5.3. Client CUDA Context Level#
By default, configuring the active thread percentage at the client CUDA context level is
disabled. User must explicitly opt-in via environment variable
CUDA_MPS_ENABLE_PER_CTX_DEVICE_MULTIPROCESSOR_PARTITIONING. Refer to
CUDA_MPS_ENABLE_PER_CTX_DEVICE_MULTIPROCESSOR_PARTITIONING for more details.
Setting this environment variable within a client process will configure the active thread percentage when creating a new client CUDA context. The new limit will only further constraint the limit set at the control daemon level and the client process level. If the control daemon or the client process has a lower setting, the lower setting will be obeyed by the client CUDA context instead. All the client CUDA contexts created afterwards will observe the new limit. Existing client CUDA contexts are not affected.
4.2.6. CUDA_MPS_ENABLE_PER_CTX_DEVICE_MULTIPROCESSOR_PARTITIONING#
By default, users can only partition the available threads uniformly. An explicit opt-in via this environment variable is required to enable non-uniform partitioning capability. To enable non-uniform partitioning capability, this environment variable must be set before the client process starts.
When non-uniform partitioning capability is enabled in an MPS client’s environment,
client CUDA contexts can have different active thread percentages within the same
client process via setting CUDA_MPS_ACTIVE_THREAD_PERCENTAGE before
context creations. The device attribute cudaDevAttrMultiProcessorCount will
reflect the active thread percentage and return the portion of available SMs that can be
used by the client CUDA context current to the calling thread.
4.2.7. CUDA_MPS_PINNED_DEVICE_MEM_LIMIT#
The pinned memory limit control limits the amount of GPU memory that is allocatable
by CUDA APIs by the client process. On Volta GPUs, this environment variable sets a
limit on pinned device memory that can be allocated by the client contexts. Setting this
environment variable in an MPS client’s environment will set the device’s pinned
memory limit when the client process starts. The new limit will only further constrain
the limit set by the control daemon (via set_default_device_pinned_mem_limit
or set_device_pinned_mem_limit control daemon commands or this environment
variable at the MPS control daemon level). If the control daemon has a lower value, the
control daemon setting will be obeyed by the client process instead. This environment
variable will have the same semantics as CUDA_VISIBLE_DEVICES i.e. the value string
can contain comma-separated device ordinals and/or device UUIDs with per device
memory limit separated by an equals. Example usage:
$ export CUDA_MPS_PINNED_DEVICE_MEM_LIMIT=''0=1G,1=512MB''
The following example highlights the hierarchy and usage of the MPS memory limiting functionality.
# Set the default device pinned mem limit to 3G for device 0. The default limit constrains the memory allocation limit of all the MPS clients of future MPS servers to 3G on device 0.
$ nvidia-cuda-mps-control set_default_device_pinned_mem_limit 0 3G
# Start daemon in background process
$ nvidia-cuda-mps-control -d
# Set device pinned mem limit to 2G for device 0 for the server instance of the
# given PID. All the MPS clients on this server will observe this new limit of 2G
# instead of the default limit of 3G when allocating pinned device memory on device 0.
# Note -- users are allowed to specify a server limit (via set_device_pinned_mem_limit)
# greater than the default limit previously set by set_default_device_pinned_mem_limit.
$ nvidia-cuda-mps-control set_device_pinned_mem_limit <pid> 0 2G
# Further constrain the device pinned mem limit for a particular MPS client to 1G for
# device 0. This ensures the maximum amount of memory allocated by this client is capped
# at 1G.
# Note - setting this environment variable to a value greater than value observed by the
# server for its clients (through set_default_device_pinned_mem_limit/ set_device_pinned_mem_limit)
* will not set the limit to the higher value and thus will be ineffective and the eventual
# limit observed by the client will be that observed by the server.
$ export CUDA_MPS_DEVICE_MEM_LIMIT="0=1G"
4.2.8. CUDA_MPS_CLIENT_PRIORITY#
The client priority level variable controls the initial default server value for the MPS Control Daemon if used to launch that, or the client priority level value for a given client if used in a client launch. The following examples demonstrate both usages.
# Set the default client priority level for new servers and clients to Below Normal
$ export CUDA_MPS_CLIENT_PRIORITY=1
$ nvidia-cuda-mps-control -d
# Set the client priority level for a single program to Normal without changing the priority level for future clients
$ CUDA_MPS_CLIENT_PRIORITY=0 <program>
Note
CUDA priority levels are not guarantees of execution order – they are only a performance hint to the CUDA driver.
4.3. MPS Logging Format#
4.3.1. Control Log#
Some of the example messages logged by the control daemon:
Startup and shutdown of MPS servers identified by their process IDs and the user ID with which they are being launched.
[2013-08-05 12:50:23.347 Control 13894] Starting new server 13929 for user 500[2013-08-05 12:50:24.870 Control 13894] NEW SERVER 13929: Ready[2013-08-05 13:02:26.226 Control 13894] Server 13929 exited with status 0New MPS client connections identified by the client process ID and the user ID of the user that launched the client process.
[2013-08-05 13:02:10.866 Control 13894] NEW CLIENT 19276 from user 500: Server already exists[2013-08-05 13:02:10.961 Control 13894] Accepting connection...User commands issued to the control daemon and their result.
[2013-08-05 12:50:23.347 Control 13894] Starting new server 13929 for user 500[2013-08-05 12:50:24.870 Control 13894] NEW SERVER 13929: ReadyError information such as failing to establish a connection with a client.
[2013-08-05 13:02:10.961 Control 13894] Accepting connection...[2013-08-05 13:02:10.961 Control 13894] Unable to read new connection type information
4.3.2. Server Log#
Some of the example messages logged by the MPS server:
New MPS client connections and disconnections identified by the client process ID.
[2013-08-05 13:00:09.269 Server 13929] New client 14781 connected[2013-08-05 13:00:09.270 Server 13929] Client 14777 disconnectedError information such as the MPS server failing to start due to system requirements not being met.
[2013-08-06 10:51:31.706 Server 29489] MPS server failed to start[2013-08-06 10:51:31.706 Server 29489] MPS is only supported on 64-bit Linux platforms, with an SM 3.5 or higher GPU.Information about fatal GPU error containment on Volta+ MPS
[2022-04-28 15:56:07.410 Other 11570] Volta MPS: status of client {11661, 1} is ACTIVE[2022-04-28 15:56:07.468 Other 11570] Volta MPS: status of client {11663, 1} is ACTIVE[2022-04-28 15:56:07.518 Other 11570] Volta MPS: status of client {11643, 2} is ACTIVE[2022-04-28 15:56:08.906 Other 11570] Volta MPS: Server is handling a fatal GPU error.[2022-04-28 15:56:08.906 Other 11570] Volta MPS: status of client {11641, 1} is INACTIVE[2022-04-28 15:56:08.906 Other 11570] Volta MPS: status of client {11643, 1} is INACTIVE[2022-04-28 15:56:08.906 Other 11570] Volta MPS: status of client {11643, 2} is INACTIVE[2022-04-28 15:56:08.906 Other 11570] Volta MPS: The following devices[2022-04-28 15:56:08.906 Other 11570] 0[2022-04-28 15:56:08.907 Other 11570] 1[2022-04-28 15:56:08.907 Other 11570] Volta MPS: The following clients have a sticky error set:[2022-04-28 15:56:08.907 Other 11570] 11641[2022-04-28 15:56:08.907 Other 11570] 11643[2022-04-28 15:56:09.200 Other 11570] Client {11641, 1} exit[2022-04-28 15:56:09.244 Other 11570] Client {11643, 1} exit[2022-04-28 15:56:09.244 Other 11570] Client {11643, 2} exit[2022-04-28 15:56:09.245 Other 11570] Volta MPS: Destroy server context on device 0[2022-04-28 15:56:09.269 Other 11570] Volta MPS: Destroy server context on device 1[2022-04-28 15:56:10.310 Other 11570] Volta MPS: Creating server context on device 0[2022-04-28 15:56:10.397 Other 11570] Volta MPS: Creating server context on device 1
4.4. MPS Known Issues#
Clients may fail to start, returning
ERROR_OUT_OF_MEMORYwhen the first CUDA context is created, even though there are fewer client contexts than the hard limit of 16.Comments: When creating a context, the client tries to reserve virtual address space for the Unified Virtual Addressing memory range. On certain systems, this can clash with the system linker and the dynamic shared libraries loaded by it. Ensure that CUDA initialization (for example,
cuInit()or anycuda*()Runtime API function) is one of the first functions called in your code. To provide a hint to the linker and to the Linux kernel that you want your dynamic shared libraries higher up in the VA space (where it won’t clash with CUDA’s UVA range), compile your code as PIC (Position Independent Code) and PIE (Position Independent Executable). Refer to your compiler manual for instructions on how to achieve this.Memory allocation API calls (including context creation) may fail with the following message in the server log: MPS Server failed to create/open SHM segment.
Comments: This is most likely due to exhausting the file descriptor limit on your system. Check the maximum number of open file descriptors allowed on your system and increase if necessary. We recommend setting it to 16384 and higher. Typically this information can be checked via the command
ulimit -n; refer to your operating system instructions on how to change the limit.
5. Appendix: Common Tasks#
The convention for using MPS will vary between system environments. The Cray environment, for example, manages MPS in a way that is almost invisible to the user, whereas other Linux-based systems may require the user to manage activating the control daemon themselves. As a user you will need to understand which set of conventions is appropriate for the system you are running on. Some cases are described in this section.
5.1. Starting and Stopping MPS on Linux#
5.1.1. On a Multi-user System#
To cause all users of the system to run CUDA applications via MPS you will need to set up the MPS control daemon to run when the system starts.
5.1.1.1. Starting MPS control daemon#
As root, run the commands:
export CUDA_VISIBLE_DEVICES=0 # Select GPU 0.
nvidia-smi -i 0 -c EXCLUSIVE_PROCESS # Set GPU 0 to exclusive mode.
nvidia-cuda-mps-control -d # Start the daemon.
This will start the MPS control daemon that will spawn a new MPS Server instance
for any $UID starting an application and associate it with the GPU visible to the control
daemon. Only one instance of the nvidia-cuda-mps-control daemon should be run per
node. Note that CUDA_VISIBLE_DEVICES should not be set in the client process’s
environment.
5.1.1.2. Shutting Down MPS Control Daemon#
To shut down the daemon, as root, run:
echo quit | nvidia-cuda-mps-control
5.1.1.3. Log Files#
You can view the status of the daemons by viewing the log files in
/var/log/nvidia-mps/control.log
/var/log/nvidia-mps/server.log
These are typically only visible to users with administrative privileges.
5.1.2. On a Single-User System#
When running as a single user, the control daemon must be launched with the same user ID as that of the client process.
5.1.2.1. Starting MPS Control Daemon#
As $UID, run the commands:
export CUDA_VISIBLE_DEVICES=0 # Select GPU 0.
export CUDA_MPS_PIPE_DIRECTORY=/tmp/nvidia-mps # Select a location that's accessible to the given $UID
export CUDA_MPS_LOG_DIRECTORY=/tmp/nvidia-log # Select a location that's accessible to the given $UID
nvidia-cuda-mps-control -d # Start the daemon.
This will start the MPS control daemon that will spawn a new MPS Server instance for that $UID starting an application and associate it with GPU visible to the control daemon.
5.1.2.2. Starting MPS client application#
Set the following variables in the client process’s environment. Note that
CUDA_VISIBLE_DEVICES should not be set in the client’s environment.
export CUDA_MPS_PIPE_DIRECTORY=/tmp/nvidia-mps # Set to the same location as the MPS control daemon
export CUDA_MPS_LOG_DIRECTORY=/tmp/nvidia-log # Set to the same location as the MPS control daemon
5.1.2.3. Shutting Down MPS#
To shut down the daemon, as $UID, run:
echo quit | nvidia-cuda-mps-control
5.1.2.4. Log Files#
You can view the status of the daemons by viewing the log files in
$CUDA_MPS_LOG_DIRECTORY/control.log
$CUDA_MPS_LOG_DIRECTORY/server.log
5.1.3. Scripting a Batch Queuing System#
5.1.3.1. Basic Principles#
Chapters 3 and 4 describe the MPS components, software utilities, and the environment variables that control them. However, using MPS at this level puts a burden on the user since:
At the application level, the user only cares whether MPS is engaged or not, and should not have to understand the details of environment settings and so on when they are unlikely to deviate from a fixed configuration.
There may be consistency conditions that need to be enforced by the system itself, such as clearing CPU- and GPU- memory between application runs, or deleting zombie processes upon job completion.
Root-access (or equivalent) is required to change the mode of the GPU.
We recommend you manage these details by building some sort of automatic provisioning abstraction on top of the basic MPS components. This section discusses how to implement a batch-submission flag in the PBS/Torque queuing environment and discusses MPS integration into a batch queuing system in general.
5.1.3.2. Per-Job MPS Control: A Torque/PBS Example#
Note
Torque installations are highly customized. Conventions for specifying job resources vary from site to site and we expect that, analogously, the convention for enabling MPS could vary from site to site as well. Check with your system’s administrator to find out if they already have a means to provision MPS on your behalf.
Tinkering with nodes outside the queuing convention is generally discouraged since
jobs are usually dispatched as nodes are released by completing jobs. It is possible to
enable MPS on a per-job basis by using the Torque prologue and epilogue scripts to start
and stop the nvidia-cuda-mps-control daemon. In this example, we re-use the account
parameter to request MPS for a job, so that the following command:
qsub -A "MPS=true" ...
will result in the prologue script starting MPS as shown:
# Activate MPS if requested by user
USER=$2
ACCTSTR=$7
echo $ACCTSTR | grep -i "MPS=true"
if [ $? -eq 0 ]; then
nvidia-smi -c 3
USERID=`id -u $USER`
export CUDA_VISIBLE_DEVICES=0
nvidia-cuda-mps-control -d && echo "MPS control daemon started"
sleep 1
echo "start_server -uid $USERID" | nvidia-cuda-mps-control && echo "MPS server started for $USER"
fi
and the epilogue script stopping MPS as shown:
# Reset compute mode to default
nvidia-smi -c 0
# Quit cuda MPS if it's running
ps aux | grep nvidia-cuda-mps-control | grep -v grep > /dev/null
if [ $? -eq 0 ]; then
echo quit | nvidia-cuda-mps-control
fi
# Test for presence of MPS zombie
ps aux | grep nvidia-cuda-mps | grep -v grep > /dev/null
if [ $? -eq 0 ]; then
logger "`hostname` epilogue: MPS refused to quit! Marking offline"
pbsnodes -o -N "Epilogue check: MPS did not quit" `hostname`
fi
# Check GPU sanity, simple check
nvidia-smi > /dev/null
if [ $? -ne 0 ]; then
logger "`hostname` epilogue: GPUs not sane! Marking `hostname` offline"
pbsnodes -o -N "Epilogue check: nvidia-smi failed" `hostname`
fi
5.2. Best Practice for SM Partitioning#
Creating a context is a costly operation in terms of time, memory, and the hardware resources.
If a context with execution affinity is created at kernel launch time, the user will observe a sudden increase in latency and memory footprint as a result of the context creation. To avoid paying the latency of context creation and the abrupt increase in memory usage at kernel launch time, it is recommended that users create a pool of contexts with different SM partitions upfront and select context with the suitable SM partition on kernel launch:
int device = 0;
cudaDeviceProp prop;
const Int CONTEXT_POOL_SIZE = 4;
CUcontext contextPool[CONTEXT_POOL_SIZE];
int smCounts[CONTEXT_POOL_SIZE];
cudaSetDevice(device);
cudaGetDeviceProperties(&prop, device);
smCounts[0] = 1; smCounts[1] = 2;
smCounts[3] = (prop. multiProcessorCount - 3) / 3;
smCounts[4] = (prop. multiProcessorCount - 3) / 3 * 2;
for (int i = 0; i < CONTEXT_POOL_SIZE; i++) {
CUexecAffinityParam affinity;
affinity.type = CU_EXEC_AFFINITY_TYPE_SM_COUNT;
affinity.param.smCount.val = smCounts[i];
cuCtxCreate_v3(&contextPool[i], affinity, 1, 0, deviceOrdinal);
}
for (int i = 0; i < CONTEXT_POOL_SIZE; i++) {
std::thread([i]() {
int numSms = 0;
int numBlocksPerSm = 0;
int numThreads = 128;
CUexecAffinityParam affinity;
cuCtxSetCurrent(contextPool[i]);
cuCtxGetExecAffinity(&affinity, CU_EXEC_AFFINITY_TYPE_SM_COUNT);
numSms = affinity.param.smCount.val;
cudaOccupancyMaxActiveBlocksPerMultiprocessor(
&numBlocksPerSm, kernel, numThreads, 0);
void *kernelArgs[] = { /* add kernel args */ };
dim3 dimBlock(numThreads, 1, 1);
dim3 dimGrid(numSms * numBlocksPerSm, 1, 1);
cudaLaunchCooperativeKernel((void*)my_kernel, dimGrid, dimBlock, kernelArgs);
};
}
The hardware resources needed for client CUDA contexts is limited and support up to
48 client CUDA contexts per-device on Volta MPS. The size of the context pool per-device
is limited by the number of CUDA client contexts supported per-device. The
memory footprint of each client CUDA context and the value of
CUDA_DEVICE_MAX_CONNECTIONS may further reduce the number of available
clients. Therefore, CUDA client contexts with different SM partitions should be created
judiciously.
5.3. Troubleshooting Guide#
5.3.1. MPS Server Not Accepting New Client Requests#
Description This error indicates that the MPS (Multi-Process Service) server is currently unable to accept new client connections. This is typically a temporary condition caused by one of the following known issues.
Possible Causes and Recommended Actions Server Recovery or Automatic Restart
Cause: The MPS server is recovering from a previous error or automatically restarting due to a kernel-level application failure.
Action: Wait for the server to complete its recovery. If these errors occur repeatedly, investigate the client application for underlying issues.
Server Initialization in Progress
Cause: The server is performing initialization operations equivalent to cuInit() --> cuCtxCreate(). On systems with multiple GPUs and no persistence daemon, this can take a significant amount of time. Any client connections attempted during this period will receive this error.
Action: Allow the initialization to complete. To speed up future startups, consider enabling the NVIDIA Persistence Daemon.
Client Termination Cleanup
Cause: A terminate_client operation is in progress. During this time, the server restricts new connections to clean up resources from a specific client.
Action: Wait for the cleanup process to finish. This does not affect other connected clients.
User ID Mismatch Without Multi-User Mode
Cause: A client with a different user ID is attempting to connect while the server is not started with the -multi-user flag.
Action: Either start the MPS server with the -multi-user option or ensure that clients are using the same user ID. The default MPS behavior is to restart the server for each unique user ID.
6. Notices#
This document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation (“NVIDIA”) makes no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assumes no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.
NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.
Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.
NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgement, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.
NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.
NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.
No license, either expressed or implied, is granted under any NVIDIA patent right, copyright, or other NVIDIA intellectual property right under this document. Information published by NVIDIA regarding third-party products or services does not constitute a license from NVIDIA to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property rights of the third party, or a license from NVIDIA under the patents or other intellectual property rights of NVIDIA.
Reproduction of information in this document is permissible only if approved in advance by NVIDIA in writing, reproduced without alteration and in full compliance with all applicable export laws and regulations, and accompanied by all associated conditions, limitations, and notices.
THIS DOCUMENT AND ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, “MATERIALS”) ARE BEING PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL NVIDIA BE LIABLE FOR ANY DAMAGES, INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF NVIDIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms of Sale for the product.
6.1. Trademarks#
NVIDIA and the NVIDIA logo are trademarks or registered trademarks of NVIDIA Corporation in the U.S. and other countries. Other company and product names may be trademarks of the respective companies with which they are associated.