DeepStream Lidar Inference App (Alpha)¶
The deepstream-lidar-inference-app sample application is provided at app/sample_apps/deepstream-lidar-inference-app/ for your reference. The deepstream_lidar_inference_app provides an end-to-end inference sample for lidar pointcloud data.
The sample application reads the point cloud data from dataset files and send the data to Triton Inferencing filter with PointPillarNet model, the inferencing result is the group of 3D bounding boxes of the objects. The sample application loads different pipelines based on different application config files.
There are 2 pipelines configured in the sample app.
Lidar Triton inference for 3D objects detection and file dump.
Lidar Triton inference and 3D objects detection and GLES 3D rendering.
Inside these sample configurations, the inference model is a 3D TAO model based on PointPillar. For more details about PointPillar, see https://arxiv.org/abs/1812.05784.
Note
TensorRT 8.5 has a bug for FP16 mode when converting this specific TAO model to TensorRT engine file. DeepStream fallback to FP32 mode for this release.
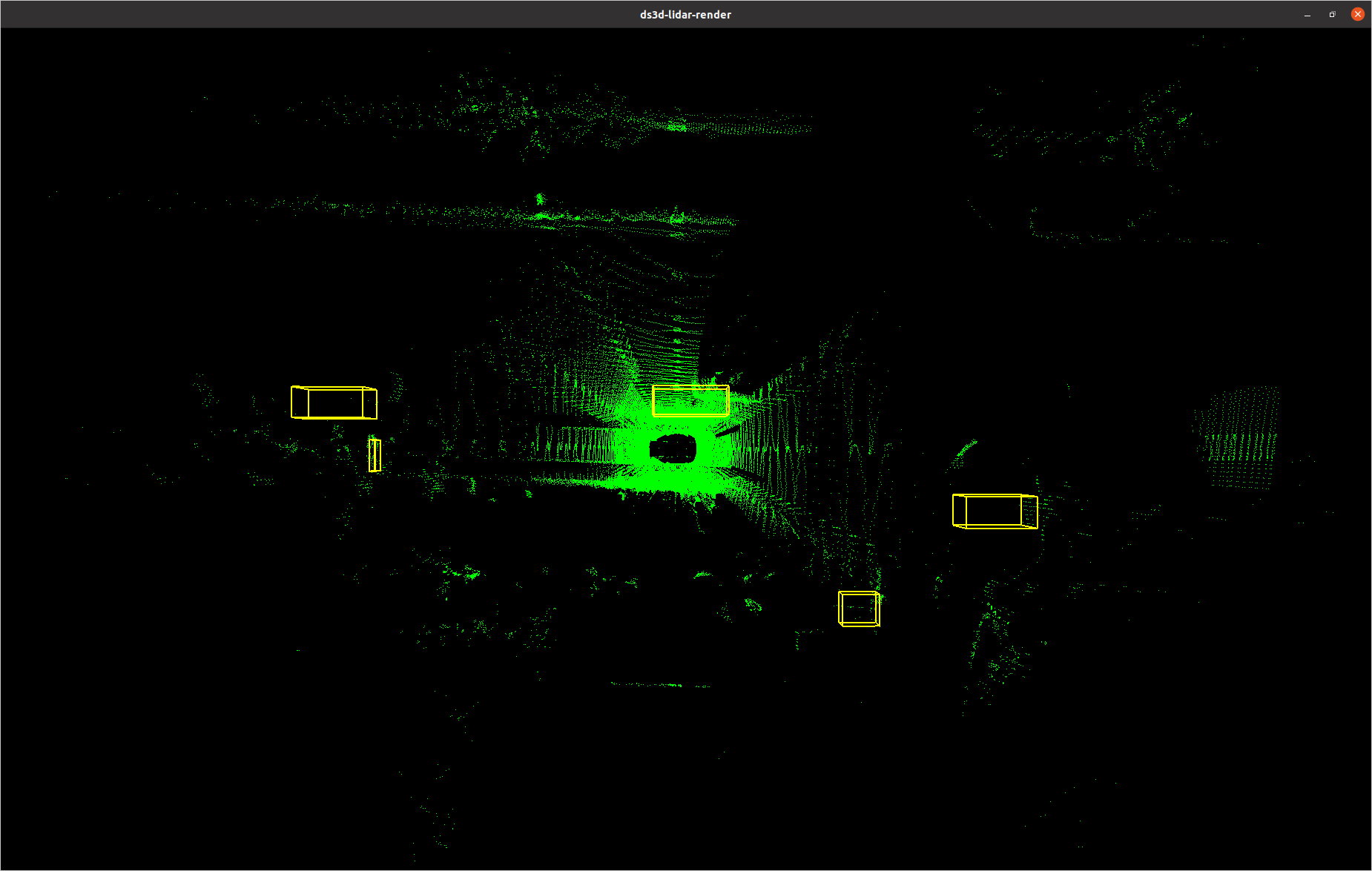
This is a snapshot for deepstream-lidar-inference-app running with lidar data inference objects detection and GLES 3D rendering with 3D bounding box display on screen.
Prerequisites¶
You must have the following development packages installed:
GStreamer-1.0
GStreamer-1.0 Base Plugins
X11 client-side library
libyaml-cpp-dev
To install these packages, execute the following command:
sudo apt-get install libgstreamer-plugins-base1.0-dev libgstreamer1.0-dev \
libgstrtspserver-1.0-dev libx11-dev libyaml-cpp-dev
Lidar Point Cloud to 3D Point Cloud Processing and Rendering¶
The application can be configured as different pipelines according to the application configuration file.
Lidar data inference and 3D bounding box dump pipeline:
This pipeline is from lidar point cloud, 3D point cloud inferencing, to the 3D objects data dump.
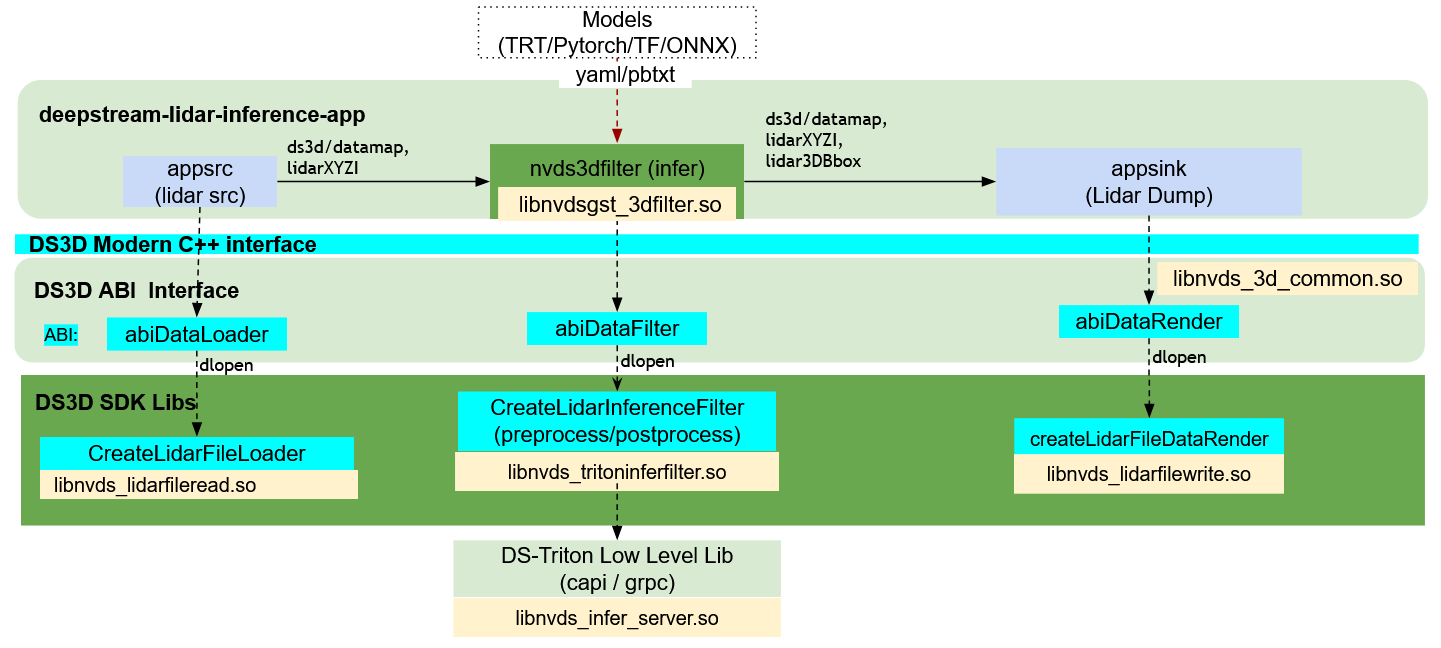
This pipeline is setup by the config_lidar_triton_infer.yaml. It has 3 components: ds3d::dataloader for lidar pointcloud data file reading, ds3d::datafilter for point-cloud Triton inferencing, and ds3d::datarender for 3D Bounding Box file dump.
ds3d::dataloaderloads custom liblibnvds_lidarfileread.soand creates a dataloader through thecreateLidarFileLoaderfunction. This specific loader is configured by lidar dataset file list data_config_file. Gst-appsrc connects the dataloader into the deepstream pipeline.name: lidarsource type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_lidarfileread.so custom_create_function: createLidarFileLoader
ds3d::datafilterloads custom liblibnvds_tritoninferfilter.soand creates a lidar point cloud Triton inferencing filter through thecreateLidarInferenceFilterfunction. For this specific configuration, The Lidar Triton filter inferences the point cloud data with TAO model PointPillarNet model and return the 3D bounding boxes around each object.name: lidarfilter type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_tritoninferfilter.so custom_create_function: createLidarInferenceFilter
ds3d::datafilteris loaded by thenvds3dfilterGst-plugin which acceptsin_capsas sink_caps andout_capsas src_caps. It creates a customds3d::datafilterinstance and processess data asds3d/datamap.ds3d::datarenderloads custom liblibnvds_lidarfilewrite.soto dump the detected 3D bounding boxes to a file.name: lidarrender type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_lidarfilewrite.so custom_create_function: createLidarFileDataRender
Lidar data inference and Lidar data rendering with 3D bounding box display pipeline:
This pipeline is from lidar point cloud data file, 3D point cloud inferencing, to the 3D point cloud rendering with colors.
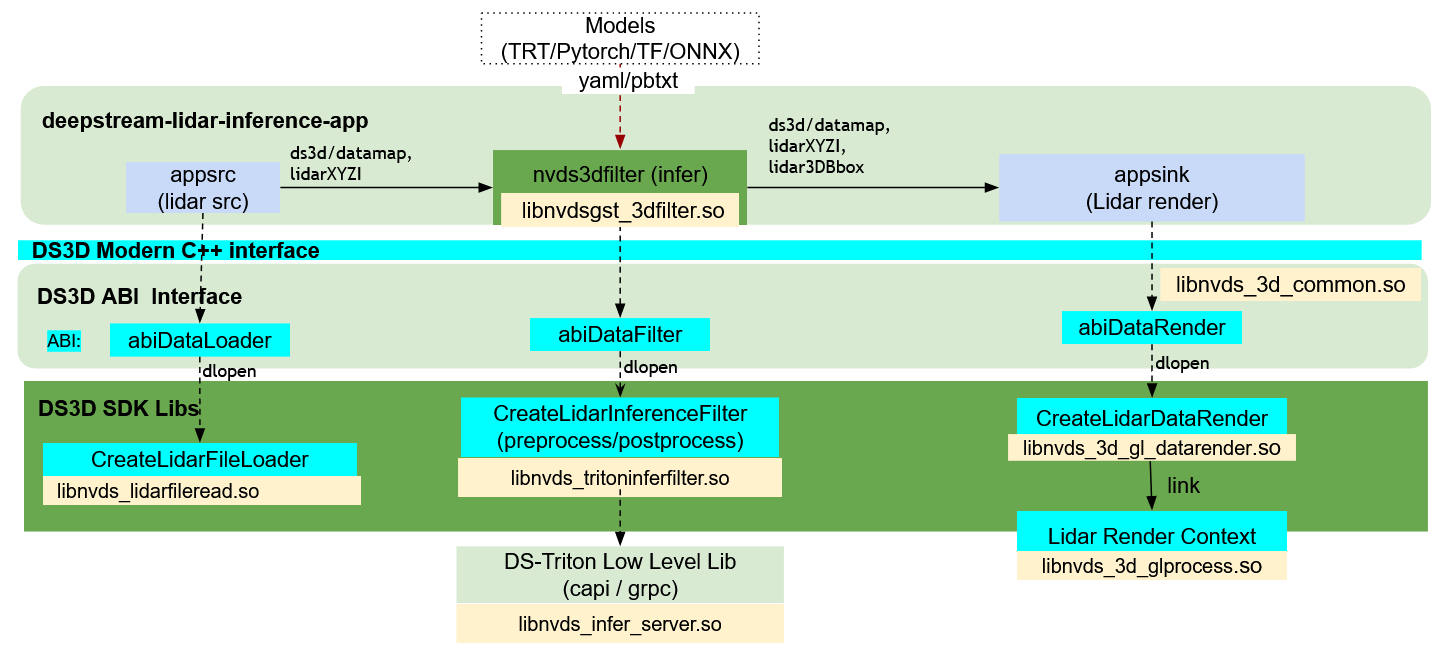
This pipeline is setup by the config_lidar_source_triton_render.yaml. It has 3 components: ds3d::dataloader for lidar pointcloud data file reading, ds3d::datafilter for point-cloud Triton inferencing, and ds3d::datarender for Lidar 3D data LidarXYZI and 3D Bounding Box rendering.
ds3d::dataloaderloads custom liblibnvds_lidarfileread.soand creates a dataloader through thecreateLidarFileLoaderfunction. This specific loader is configured by lidar dataset file list data_config_file. Gst-appsrc connects the dataloader into the deepstream pipeline.name: lidarsource type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_lidarfileread.so custom_create_function: createLidarFileLoader
ds3d::datafilterloads custom liblibnvds_tritoninferfilter.soand creates a lidar point cloud Triton inferencing filter through thecreateLidarInferenceFilterfunction. For this specific configuration, The Lidar Triton filter inferences the point cloud data with TAO model PointPillarNet model and return the 3D bounding boxes around each object.name: lidarfilter type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_tritoninferfilter.so custom_create_function: createLidarInferenceFilter
ds3d::datafilteris loaded by thenvds3dfilterGst-plugin which acceptsin_capsas sink_caps andout_capsas src_caps. It creates a customds3d::datafilterinstance and processess data asds3d/datamap.ds3d::datarenderloads custom liblibnvds_3d_gl_datarender.soand creates GLES Lidar point cloud rendering context to display XYZI or XYZ lidar data and 3D bounding boxes withcustom_create_function: createLidarDataRender.name: lidarrender type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createLidarDataRender
Getting Started¶
Run Lidar Point Cloud Data File reader, Point Cloud Inferencing filter, and Point Cloud 3D rendering and data dump Examples¶
Prepare PointPillarNet model and Triton environment, this app will use Triton to do inference, for more details of Triton Inferencing Server, refer to https://docs.nvidia.com/metropolis/deepstream/dev-guide/text/DS_plugin_gst-nvinferserver.html. There are more details in the deepstream-lidar-inference-app README file.
Run the lidar point cloud data inference pipeline in 2 modes.
Run lidar data reader, point cloud 3D objects detection inference and 3D data GLES rendering pipeline:
$ deepstream-lidar-inference-app -c configs/config_lidar_source_triton_render.yamlRun lidar data reader, point cloud 3D objects inference and 3D objects file dump pipeline:
$ deepstream-lidar-inference-app -c configs/config_lidar_triton_infer.yaml
This part sets up a lidar point cloud loader dataloader. It then streams ds3d/datamap to the downstream datafilter component lidarfilter.
name: lidarsource type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_lidarfileread.so custom_create_function: createLidarFileLoader
It streams ds3d/datamap to the
nvds3dfilterGst-plugin which loadslidarfilterto do Triton inferencing on point cloud. For more details onnvds3dfilterGst-plugin, See Gst-nvds3dfilter.name: lidarfilter type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_tritoninferfilter.so custom_create_function: createLidarInferenceFilter
Field of model_inputs is the description of the model input layers. Includes layer name, layer data type and layer dimensions.
model_inputs: - name: points # name of the 1st layer datatype: FP32 # data type of the 1st layer shape: [1, 204800, 4] # data dimension of the 1st layer - name: num_points # name of the 2nd layer datatype: INT32 # data type of the 2nd layer shape: [1] # data dimension of the 2nd layer
Field of model_outputs is the description of the model output layers. Includes layer name, layer data type and layer dimensions.
model_outputs: - name: output_boxes # name of the 1st layer datatype: FP32 # data type of the 1st layer shape: [1, 393216, 9] # data dimension of the 1st layer - name: num_boxes # name of the 2nd layer datatype: INT32 # data type of the 2nd layer shape: [1] # data dimension of the 2nd layer
Field of labels is the label list of the point cloud inferencing model.
labels: # YAML list for object labels - Vehicle - Pedestrain - Cyclist
Finally the data stream as ds3d/datamap is delivered to the render component. a. 3D detection file dump component
lidarfiledump.name: lidarfiledump type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_lidarfilewrite.so custom_create_function: createLidarFileDataRender
b. GLES lidar data rendering component
lidardatarender.name: lidardatarender type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createLidarDataRender
DeepStream Lidar Inference App Configuration Specifications¶
deepstream-lidar-inference-app [ds3d::userapp] group settings¶
The table below demonstrates the group settings for config_lidar_triton_infer.yaml and config_lidar_source_triton_render.yaml as the examples.
Group |
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|---|
LidarFileLoader |
data_config_file |
lidar data list file path |
string |
data_config_file: lidar_data_list.yaml |
LidarFileLoader |
points_num |
number of the points in pointcloud file |
fixed value |
points_num: 204800 |
LidarFileLoader |
lidar_datatype |
data type of the dataset |
String:FP32 FP16 INT8 INT32 |
lidar_datatype: FP32 |
LidarFileLoader |
mem_type |
memory type of process data:just support cpu now |
String:gpu cpu |
mem_type: cpu |
LidarFileLoader |
mem_pool_size |
Size of the data read pool |
Integer: >0 |
mem_pool_size: 4 |
LidarFileLoader |
output_datamap_key |
datamap key in lidarsource |
string |
output_datamap_key: DS3D::LidarXYZI |
LidarFileLoader |
file_loop |
flag for file reading loop |
boolean |
file_loop: False |
LidarInferenceFilter |
in_streams |
which data type will be processed |
fixed value |
in_streams: [lidar] |
LidarInferenceFilter |
mem_pool_size |
Size of the input tensor pool |
Integer |
mem_pool_size: 8 |
LidarInferenceFilter |
model_inputs |
model ‘s input layers |
Array |
refer to config_lidar_triton_infer.yaml |
LidarInferenceFilter |
model_outputs |
model ‘s output layers |
Array |
refer to config_lidar_triton_infer.yaml |
LidarInferenceFilter |
input_tensor_mem_type |
input tensor memory type after preprocess |
String:GpuCuda CpuCuda |
input_tensor_mem_type: GpuCuda |
LidarInferenceFilter |
custom_preprocess_lib_path |
preprocessing library path |
String |
custom_preprocess_lib_path: /opt/nvidia/deepstream/deepstream/lib/libnvds_lidar_custom_preprocess_impl.so |
LidarInferenceFilter |
custom_preprocess_func_name |
customized preprocessing function name |
String |
custom_preprocess_func_name: CreateInferServerCustomPreprocess |
LidarInferenceFilter |
labels |
label list for the detection model |
Array |
refer to config_lidar_triton_infer.yaml |
LidarInferenceFilter |
postprocess_nms_iou_thresh |
NMS IOU threshold |
Float |
postprocess_nms_iou_thresh: 0.01 |
LidarInferenceFilter |
postprocess_pre_nms_top_n |
number of TOPs of NMS |
Integer |
postprocess_nms_top_n: 4096 |
LidarInferenceFilter |
config_file |
nvinferserver configuration file |
String |
config_file: triton_mode_CAPI.txt |
LidarInferenceFilter |
gpu_id |
GPU id for the tensor memory(for native Triton Server Inferencing) |
Integer |
gpu_id: 0 |
LidarInferenceFilter |
filter_input_datamap_key |
input datamap key from lidarsource |
String |
filter_input_datamap_key: DS3D::LidarXYZI |
LidarFileDataRender |
frames_save_path |
the path of the dump file |
String |
frames_save_path: ../datas/ |
LidarFileDataRender |
input_datamap_key |
input key from the custom_postprocess for inferencing objects |
String |
input_datamap_key: DS3D::Lidar3DBboxRawData |
LidarDataRender |
title |
the title of the render |
String |
title: ds3d-lidar-render |
LidarDataRender |
streams |
the stream key(s) for the input to be rendered |
List |
streams: [lidardata] |
LidarDataRender |
width |
render area width |
Integer |
width: 1280 |
LidarDataRender |
height |
render area height |
Integer |
height: 720 |
LidarDataRender |
block |
the flag of enabling block function |
Boolean |
block: True |
LidarDataRender |
view_position |
the view position for lookat vector |
List |
view_position: [0, 0, 80] |
LidarDataRender |
view_target |
the view target for lookat vector |
List |
view_target: [0, 0, 0] |
LidarDataRender |
view_up |
the up vector of the visualizer |
List |
view_up: [1, 0, 0] |
LidarDataRender |
near |
the near z-plane of the visualizer constance |
Float |
near: 0.3 |
LidarDataRender |
far |
the far z-plane of the visualizer constance |
Float |
far: 100 |
LidarDataRender |
fov |
degree for field of view |
Integer |
fov: 45 |
LidarDataRender |
lidar_color |
the RGB color description of the lidar data |
List,lidar_color: [0, 255, 0] |
|
LidarDataRender |
lidar_data_key |
the lidar data key name in datamap |
String |
lidar_data_key: DS3D::LidarXYZI |
LidarDataRender |
element_size |
the lidar data element size (4, XYZI or 3, XYZ) |
Integer |
element_size: 4 |
LidarDataRender |
lidar_bbox_key |
the 3D bbox data key name in datamap |
String |
DS3D::Lidar3DBboxRawData |
DS3D Custom Components Configuration Specifications¶
See more details in the DS_3D supported custom components specifications section in the DeepStream 3D Custom Manual .
Build application From Source¶
Go to the folder sources/apps/sample_apps/deepstream-lidar-inference-app.
Run the following commands:
$ sudo make $ sudo make install
Note
Check the source code for more details on how to load dataloader/datarender through
Gst-appsrcandGst-appsink. datafilter is loaded by thenvds3dfilterGst-plugin.