DeepStream 3D Custom Manual¶
New ds3d framework, interfaces and custom-libs are defined for DS 3D processing. These interfaces are capble of different types of data fusion and can implement different types of custom libraries for dataloader, datafilter and datarender. The interface has ABI compatible layers and modern C++ interface layers. You’ll only need to focus on the modern interface for application or custom lib development.
DeepStream 3D dataloader is loaded by GstAppSrc. It could be used for depth camera such as stereo cameras, Time-of-Flight cameras to capture image/depth data or 2D/3D data-load from the source file.
datafilter is loaded by the nvds3dfilter Gst-plugin. It could be used for 2D depth data processing , 3D point-cloud data extraction from depth and other 2D-depth or 3D-points data filters.
datarender is loaded by GstAppSink. It could be used for 2D depth rendering and 3D point-cloud data rendering.
deepstream-3d-depth-camera has the sample code to load these custom libs and to connect these components together in simple ways. Besides that, DS3D has a simple C++ safe pointer for Gstreamer components. The interfaces are found in header files located at /opt/nvidia/deepstream/deepstream/sources/libs/ds3d/gst/.
The image below shows the overview of depth to 3D point processing pipeline in deepstream-3d-depth-camera.
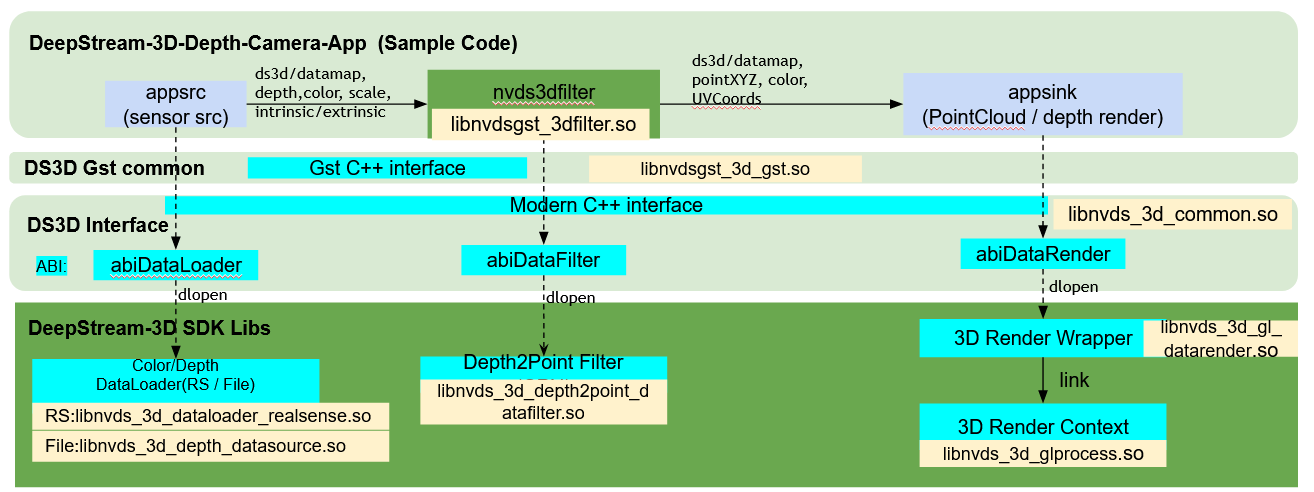
All the components are configured in YAML format. They are loaded by Gst-plugins.There are 3 major components, they may all be loaded into the deepstream pipeline.
ds3d::dataloader - Load Custom Lib for Data Capture¶
Load and Manage Dataloader¶
Examples:
name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader config_body: streams: [color, depth]
A custom dataloader must have type: ds3d::dataloader. It is created by explicit call of NvDs3D_CreateDataLoaderSrc(srcConfig, loaderSrc, start) with the full compoment YAML content. During this call, the custom_lib_path is loaded and a specific data loader is created via custom_create_function. A GstAppsrc object is also created into loaderSrc.gstElement.
- GstAppsrc manages the ds3d::dataloader dataflows. This
ds3d::dataloadercomponent could be started automatically by gst-pipeline or manually by the application call. GuardDataLoader dataloader = loaderSrc.customProcessor; ErrCode c = dataloader.start();
- To stop the dataloader, user can set GstAppsrc states to
GST_STATE_READYor stop it manually. GuardDataLoader dataloader = loaderSrc.customProcessor; ErrCode c = dataloader.stop();
Dataloader in User Application¶
- Examples:
#include <ds3d/common/hpp/dataloader.hpp> GuardDataLoader dataLoader; dataLoader.reset(createTestTimeDataloader()); # create a specific ABI ErrCode c = dataloader.setErrorCallback([](ErrCode c, const char*){}); c = dataloader.start(yamlconfig); // check result. while(isGood(c)) { GuardDataMap data; c = dataloader.readData(data); // process data } c = dataloader.flush(); c = dataloader.stop();
GuardDataLoader provides safe access to abiDataLoader. Once it’s created, it will maintain the reference pointer to the dataloader.
Implement a Custom Dataloader¶
- Examples:
#include <ds3d/common/impl/impl_dataloader.h> class TestTimeDataLoader : public ds3d::impl::SyncImplDataLoader { public: TestTimeDataLoader() = default; protected: ErrCode startImpl(const std::string& content, const std::string& path) override { setOutputCaps("ds3d/datamap"); return ErrCode::kGood; } ErrCode readDataImpl(GuardDataMap& datamap) override { datamap.reset(NvDs3d_CreateDataHashMap()); static uint64_t iTime = 0; TimeStamp t{iTime++, 0, 0}; datamap.setData("time", t); emitError(ErrCode::kGood, "timstamp added"); return ErrCode::kGood; } ErrCode stopImpl() override { return ErrCode::kGood; } ErrCode flushImpl() override { return ErrCode::kGood; } }; DS3D_EXTERN_C_BEGIN DS3D_EXPORT_API abiRefDataLoader* createTestTimeDataloader() { return NewAbiRef<abiDataLoader>(new TestTimeDataLoader); } DS3D_EXTERN_C_END
- A shown in the example above, You’ll need to derive dataloader from the
ds3d::impl::SyncImplDataLoaderclass, and implement interfaces for the following: ErrCode startImpl(const std::string& content, const std::string& path) override; ErrCode readDataImpl(GuardDataMap& datamap) override; ErrCode stopImpl() override; ErrCode flushImpl() override;
To load this custom lib through NvDs3D_CreateDataLoaderSrc, you’ll also need to export createTestTimeDataloader.
ds3d::datafilter- Loads Custom Lib for Input and Output Processing¶
Load And Manage Datafilter¶
- Examples:
name: point2cloud_datafilter type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_3d_depth2point_datafilter.so custom_create_function: createDepth2PointFilter config_body:
A custom datafilter must have type: ds3d::datafilter. It is loaded through the nvds3dfilter Gst-plugin. It is started by gst_element_set_state(GST_STATE_READY). During this call, the custom_lib_path is loaded and a specific data filter is created by custom_create_function. nvds3dfilter Gst-plugin has config-content and config-file properties. One of them must be set to create a datafilter object.
Datafilter in User Application¶
- Examples:
#include <ds3d/common/hpp/datafilter.hpp> GuardDataFilter datafilter; datafilter.reset(createTestFakeDatafilter()); # create a specific ABI ErrCode c = datafilter.setErrorCallback([](ErrCode c, const char*){}); c = datafilter.start(yamlconfig); // check result. int consumedNum = 0; auto dataConsumed = [&consumedNum](ErrCode c, const abiRefDataMap* data) { if (isGood(c)) { ++consumedNum; } }; for (int i = 0; i < 100; ++i) { TimeStamp t{i, 0, 0}; GuardDataMap dataIn; dataIn.reset(NvDs3d_CreateDataHashMap()); dataIn.setData("time", t); GuardDataMap dataOut; ErrCode cbCode = ErrCode::kGood; auto outputCB = [&dataOut, &cbCode](ErrCode c, const abiRefDataMap* data) { cbCode = c; if (data) { GuardDataMap newData(*data); dataOut = newData; } }; c = dataFilter.process(dataIn, dataConsumed, outputCB); } c = datafilter.flush(); c = datafilter.stop();
GuardDataFilter provides safe access to the abiDataFilter. Once it’s created, it will maintain the reference pointer to datafilter.
Implement a Custom Datafilter¶
- Examples:
#include <ds3d/common/impl/impl_datafilter.h> class TestFakeDataFilter : public impl::BaseImplDataFilter { public: TestFakeDataFilter() = default; protected: ErrCode startImpl(const std::string& content, const std::string& path) override { setInputCaps(kFakeCapsMetaName); setOutputCaps(kFakeCapsMetaName); return ErrCode::kGood; } ErrCode processImpl( GuardDataMap datamap, OnGuardDataCBImpl outputDataCb, OnGuardDataCBImpl inputConsumedCb) override { DS_ASSERT(datamap); TimeStamp t; ErrCode c = datamap.getData("time", t); if (!isGood(c)) { return c; } t.t0 += 1; inputConsumedCb(ErrCode::kGood, datamap); c = datamap.setData("time", t); if (!isGood(c)) { return c; } outputDataCb(ErrCode::kGood, datamap); return ErrCode::kGood; } ErrCode flushImpl() override { return ErrCode::kGood; } ErrCode stopImpl() override { return ErrCode::kGood; } }; DS3D_EXTERN_C_BEGIN DS3D_EXPORT_API abiRefdatafilter* createTestFakeDatafilter() { return NewAbiRef<abidatafilter>(new TestFakeDataFilter); } DS3D_EXTERN_C_END- As shown in the example above, you’ll need to derive the datafilter from the
ds3d::impl::BaseImplDataFilterclass, and implement interfaces for the following: ErrCode startImpl(const std::string& content, const std::string& path) override; ErrCode processImpl( GuardDataMap datamap, OnGuardDataCBImpl outputDataCb, OnGuardDataCBImpl inputConsumedCb) override; ErrCode stopImpl() override; ErrCode flushImpl() override;
To load this custom lib through nvds3dfilter Gst-plugin, you’ll also need to export a specific symbol createTestFakeDatafilter.
ds3d::datarender - Loads Custom Lib for Data Rendering¶
Load And Manage Datarender¶
- Examples:
name: point-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so custom_create_function: createPointCloudDataRender config_body: title: ds3d-point-cloud-test
A custom datarender must have type: ds3d::datarender. It is created by explicit call of NvDs3D_CreateDataRenderSink(sinkConfig, renderSink, start) with the full compoment YAML content. During this call, the custom_lib_path is loaded and a specific data loader is created via custom_create_function. A GstAppsink object is also created into renderSink.gstElement.
- GstAppsink manages the ds3d::datarender dataflows. This ds3d::datarender component could be automatically started by the gst-pipeline, or manually by the application call.
GuardDataRender datarender = renderSink.customProcessor; ErrCode c = datarender.start();
- To stop the datarender, you can set GstAppsink states to
GST_STATE_READY, or stop manually. GuardDataRender datarender = renderSink.customProcessor; ErrCode c = datarender.stop();
Datarender in User Application¶
- Examples:
#include <ds3d/common/hpp/datarender.hpp> GuardDataRender datarender; datarender.reset(createTestFakedatarender()); ErrCode c = datarender.setErrorCallback([](ErrCode c, const char*){}); c = datarender.start(yamlconfig); // check result. for (int i = 0; i < 100; ++i) { static uint64_t iTime = 0; TimeStamp t{iTime++, 0, 0}; GuardDataMap datamap; datamap.reset(NvDs3d_CreateDataHashMap()); ASSERT_TRUE(datamap); datamap.setData("time", t); if (i == 0) { c = dataRender.preroll(datamap); } ErrCode c = dataRender.render(datamap, dataRenderd); } c = datarender.flush(); c = datarender.stop();
GuardDataRender provides safe access to abidatarender. Once it’s created, it will maintain the reference pointer to datarender. preroll is called only once to initialize some resources.
Implement a Custom Datarender¶
- Examples:
#include <ds3d/common/impl/impl_datarender.h> class TestFakeDataRender : public impl::BaseImplDataRender { public: TestFakeDataRender() = default; protected: ErrCode startImpl(const std::string& content, const std::string& path) override { setInputCaps("ds3d/datamap"); return ErrCode::kGood; } ErrCode prerollImpl(GuardDataMap datamap) override { return ErrCode::kGood; } ErrCode renderImpl(GuardDataMap datamap, OnGuardDataCBImpl dataDoneCb) override { DS_ASSERT(datamap); emitError(ErrCode::kGood, "data rendered"); dataDoneCb(ErrCode::kGood, datamap); return ErrCode::kGood; } ErrCode flushImpl() override { return ErrCode::kGood; } ErrCode stopImpl() override { return ErrCode::kGood; } }; DS3D_EXTERN_C_BEGIN DS3D_EXPORT_API abiRefdatarender* createTestFakedatarender() { return NewAbiRef<abiDataRender>(new TestFakeDataRender()); } DS3D_EXTERN_C_END
- As shown in the example above, you’ll need to derive datarender from the
ds3d::impl::BaseImplDataRenderclass, and implement interfaces for the following: ErrCode startImpl(const std::string& content, const std::string& path) override; ErrCode prerollImpl(GuardDataMap datamap) override; ErrCode renderImpl(GuardDataMap datamap, OnGuardDataCBImpl dataDoneCb) override; ErrCode stopImpl() override; ErrCode flushImpl() override;
To load this custom lib through NvDs3D_CreateDataRenderSink, you’ll also need to export a specific symbol createTestFakedatarender.
DS3D GuardDataMap Buffer Management¶
DS3D Data Map Read¶
- DS3D defines class objects
ds3d::abiRefDataMap. All internal data are hash and stored into this data map.NvDs3DBufferis defined to store the 3D datamap into GstBuffer. Header file isnvds3d_meta.h. struct NvDs3DBuffer { uint32_t magicID; // must be 'DS3D' ds3d::abiRefDataMap* datamap; };
Warning
Do not use the datamap directly. The easy and safe way to access that is through GuardDataMap. See sample code in :doc: DS_3D_Depth_Camera.
Example:
#include <ds3d/common/hpp/datamap.hpp> #include <ds3d/common/hpp/frame.hpp> if (NvDs3D_IsDs3DBuf(gstBuf)) { const abiRefDataMap* refDataMap = nullptr; ErrCode c = NvDs3D_Find1stDataMap(gstBuf, refDataMap); ... // check error code if (refDataMap) { GuardDataMap dataMap(*refDataMap); FrameGuard pointFrame; c = dataMap.getGuardData(kPointXYZ, pointFrame); // get 3D points reference. ... // check error code FrameGuard uvCoord; c = dataMap.getGuardData(kPointCoordUV, uvCoord); // get 3D points UV coordinates reference. ... // check error code Frame2DGuard depthFrame; c = dataMap.getGuardData(kDepthFrame, depthFrame); // get depth frame reference. ... // check error code DepthScale scale; c = dataMap.getData(kDepthScaleUnit, scale); // copy depth scale ... // check error code } }
DS3D Data Map Write¶
Create an empty datamap, store some frames into this datamap. Example:
#include <ds3d/common/hpp/datamap.hpp> #include <ds3d/common/hpp/frame.hpp> #include <ds3d/common/impl/impl_frames.h> GuardDataMap datamap(NvDs3d_CreateDataHashMap(), true); // set true to take the reference ownership. /* Create depth frame and store them into ds3d datamap. */ // Assume depth datatype: Uint16 { Frame2DPlane depthPlane = {640, 480, 640 * sizeof(uint16_t) , sizeof(uint16_t), 0}; uint32_t depthBytesPerFrame = depthPlane.pitchInBytes * depthPlane.height; std::vector<uint8_t> data(depthBytesPerFrame); // Depth data void* dataPtr = &data[0]; // create depth 2D frame Frame2DGuard depthFrame = Wrap2DFrame<uint16_t, FrameType::kDepth>( dataPtr, depthPlane}, depthBytesPerFrame, MemType::kCpu, 0, [data = std::move(data)](void*) {}); c = datamap.setGuardData(kDepthFrame, depthFrame); // store depthFrame reference into datamap. ... // check error code DepthScale scale{0.001, {nullptr}}; // c = datamap.setData(kDepthScaleUnit, scale); // copy depth scale into datamap. ... // check error code } /* Create color image frame and store them into ds3d datamap. */ // Assume format is RGBA { Frame2DPlane colorPlane = {1920, 1080, 1920 * sizeof(uint8_t) , sizeof(uint8_t), 0}; uint32_t colorBytesPerFrame = colorPlane.pitchInBytes * colorPlane.height; std::vector<uint8_t> data(colorBytesPerFrame); // Image data void* dataPtr = &data[0]; // create color 2D frame Frame2DGuard frame = Wrap2DFrame<uint8_t, FrameType::kColorRGBA>( dataPtr, {_config.colorPlane}, bytesPerFrame, MemType::kCpu, 0, [data = std::move(data)](void*) {}); c = datamap.setGuardData(kColorFrame, colorFrame); // store colorFrame reference into datamap. ... // check error code } /* Create 3D points frame and store them into ds3d datamap. */ { uint32_t pointNum = 640 * 480; std::vector<vec3f> points(pointNum); // 3D points data vec3f* pointPtr = &points[0]; FrameGuard pointsFrame = wrapPointXYZFrame<float>( (void*)pointPtr, pointNum, MemType::kCpu, 0, [points = std::move(points)](void*) {}); c = datamap.setGuardData(kPointXYZ, pointXyzFrame); // store 3d-points XYZ data reference into datamap. ... // check error code std::vector<vec3f> uvData(pointNum); // 3D points data vec3f* uvPtr = &data[0]; FrameGuard pointUvCoord = wrapPointCoordUVFrame<float>( (void*)uvPtr, pointNum, MemType::kCpu, 0, [uvData = std::move(uvData)](void*) {}); c = datamap.setGuardData(kPointCoordUV, pointUvCoord); // store 3d-points UV coordinate data reference into datamap. ... // check error code }
The example below shows how to Create a new GstBuffer with ds3d datamap.
// Assume ``GuardDataMap datamap`` is ready
GstBuffer* gstBuf = nullptr;
ErrCode c = NvDs3D_CreateGstBuf(gstBuf, datamap.abiRef(), false); // set false to increase reference count.
... // check error code
Example below shows how to update an existing DS3D GstBuffer with new ds3d datamap.
// Assume ``GuardDataMap datamap`` is ready
// Assume ``GstBuffer* gstBuf`` is created by another compoment
ErrCode c = NvDs3D_UpdateDataMap(gstBuf, datamap.abiRef(), false); // set false to increase reference count.
... // check error code
Custom Libs Configuration Specifications¶
Components Common Configuration Specifications¶
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
type |
Custom processor type |
String, [ds3d::dataloader, ds3d::datafilter, ds3d::datarender] |
type: ds3d::dataloader |
name |
Indicate user-defined component name |
String |
name: depthloader |
in_caps |
Indicate Gst sink caps for the component |
String |
in_caps: ds3d/datamap |
out_caps |
Indicate Gst sink caps for the component |
String |
out_caps: ds3d/datamap |
custom_lib_path |
Indicate custom lib path |
String |
custom_lib_path: libnvds_3d_gl_datarender.so |
custom_create_function |
Indicate custom function to create the specific ds3d processing component |
String |
custom_create_function: createPointCloudDataRender |
config_body |
Indicate YAML specific content for the custom comonent |
String |
|
libnvds_3d_dataloader_realsense Configuration Specifications¶
Configuration for Realsense Dataloader Header:
name: realsense_dataloader type: ds3d::dataloader out_caps: ds3d/datamap custom_lib_path: libnvds_3d_dataloader_realsense.so custom_create_function: createRealsenseDataloader
libnvds_3d_dataloader_realsense.so requires you to install librealsense2 SDK. For x86, follow the instructions from https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md.
For Jetson platform, follow the instructions from https://github.com/IntelRealSense/librealsense/blob/master/doc/installation_jetson.md.
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
streams |
Specify which streams to enable |
List[String], select from [color, depth] |
streams: [color, depth] |
aligned_image_to_depth |
Indicate whether color image is aligned to depth |
Boolean |
aligned_image_to_depth: False |
libnvds_3d_depth2point_datafilter Configuration Specifications¶
Configuration for Depth to Points Header:
name: depth2points type: ds3d::datafilter in_caps: ds3d/datamap out_caps: ds3d/datamap custom_lib_path: libnvds_3d_depth2point_datafilter.so custom_create_function: createDepth2PointFilter
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
streams |
Specify which streams to enable |
List[String], select from [color, depth] |
streams: [color, depth] |
max_points |
Indicate maximum 3d points to allocate |
Uint32 |
max_points: 407040 |
mem_pool_size |
Indicate max buffer pool size |
Uint32 |
mem_pool_size: 8 |
libnvds_3d_gl_datarender Configuration Specifications¶
- Configuration for Common header:
name: depth-point-render type: ds3d::datarender in_caps: ds3d/datamap custom_lib_path: libnvds_3d_gl_datarender.so
Configuration for Body Common Part:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
title |
Specify window title |
String |
title: ds3d-point-cloud-test |
streams |
Indicate which streams to render. depth render must have [depth], 3D points render must have [points] |
List[String], select from [color, depth, points] |
streams: [color, depth] |
width |
Specify window width |
UINT32 |
width: 1280 |
height |
Specify window height |
UINT32 |
height: 720 |
block |
Indicate rendering thread as block mode |
Boolean |
block: True |
Configuration for Point Render Header:
name: point-3D-render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gl_datarender.so
custom_create_function: createPointCloudDataRender # specific function for 3D point rendering
Configuration for Body 3D Point Render Specific Part:
For more details on 3D coordinate system, refer to https://learnopengl.com/Getting-started/Coordinate-Systems.
To know the value meanings for view_position, view_target and view_up,refer to the gluLookAt here: https://www.khronos.org/registry/OpenGL-Refpages/gl2.1/xhtml/gluLookAt.xml.
To know the value meanings for near, far and fov, refer to the gluPerspective here: https://www.khronos.org/registry/OpenGL-Refpages/gl2.1/xhtml/gluPerspective.xml.
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
view_position |
Specify view position [x, y, z]coordinates |
List[Float] |
view_position: [0, 0, -1] |
view_target |
Specify view target [x, y, z]coordinates |
List[Float] |
view_target: [0, 0, 1] |
view_up |
Specify view up direction [x, y, z]coordinates |
List[Float] |
view_up: [0, -1.0, 0] |
near |
Specify perspective projection near plane |
Float |
near: 0.01 |
far |
Specify perspective projection far plane |
Float |
far: 10.0 |
fov |
Specify perspective projection field of view, degree angle |
Float |
fov: 40.0 |
coord_y_opposite |
Specify texture map V direction, Realsense coordinates is different from GLES default coordinates |
Boolean |
coord_y_opposite: False |
positive_z_only |
Specify whether display negtive depth values |
Boolean |
positive_z_only: False |
Configuration for Depth and Color 2D Render Header:
name: depth-2D-render
type: ds3d::datarender
in_caps: ds3d/datamap
custom_lib_path: libnvds_3d_gl_datarender.so
custom_create_function: createDepthStreamDataRender # specific function for 2D depth rendering
Configuration for Body Depth and Color 2D Specific Part:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
min_depth |
Specify minimum depth value. other values less that it will be removed in rendering |
Float |
min_depth: 0.3 |
max_depth |
Specify maximum depth value. other values less that it will be removed in rendering |
Float |
max_depth: 2.0 |
min_depth_color |
Specify minimum depth rendering color in [R, G, B] |
List[Uint32] |
min_depth_color: [255, 128, 0] |
max_depth_color |
Specify maximum depth rendering color in [R, G, B] |
Float |
max_depth_color: [0, 128, 255] |
libnvds_3d_depth_datasource Depth file source Specific Configuration Specifications¶
- Configuration header:
name: depthfilesource type: ds3d::dataloader out_caps: ds3d/datamap, framerate=30/1 custom_lib_path: libnvds_3d_depth_datasource.so custom_create_function: createDepthColorLoader
Configuration body:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
depth_source |
Specify file path for depth source |
String |
depth_source: depth_uint16_640x480.bin |
color_source |
Specify file path for color image source |
String |
color_source: color_rgba_1920x1080.bin |
depth_scale |
Indicate depth unit in meters per each depth value |
Float |
depth_scale: 0.0010 |
depth_datatype |
Indicate depth datatype, only [uint16] is supported for this version |
String, Values must be uint16 |
depth_datatype: uint16 |
depth_size |
Indicate depth resolutions in [width, height] |
List[Uint32], must be [width, height] |
depth_size: [640, 480] |
color |
Indicate color format. only rgba is supported |
String. Value must be rgba |
color: rgba |
color_size |
Indicate color resolutions in [width, height] |
List[Uint32], must be [width, height] |
color_size: [1920, 1080] |
depth_intrinsic |
Indicate depth sensor intrinsic parameter groups |
Intrinsic Configuration Group |
|
color_intrinsic |
Indicate color sensor intrinsic parameter groups |
Intrinsic Configuration Group |
|
depth_to_color_extrinsic |
Indicate extrinsic parameters from depth sensor to color sensor |
Extrinsic Configuration Group |
|
Intrinsic Parameters in Configuration body:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
width |
Specify sensor width in pixels |
Uint32 |
width: 848 |
height |
Specify sensor height in pixels |
Uint32 |
height: 480 |
centerX |
Specify coordinate axis position in pixels in horizontal direction |
Float |
centerX: 424.06 |
centerY |
Specify coordinate axis position in pixels in vertical direction |
Float |
centerY: 533.28 |
fx |
Specify focal length in pixels in X direction |
Float |
fx: 1358.21 |
fy |
Specify focal length in pixels in Y direction |
Float |
fy: 1358.25 |
Extrinsic Parameters in Configuration body:
Property |
Meaning |
Type and Range |
Example |
|---|---|---|---|
rotation |
Specify an extrinsic 3x3 matrix for rotation. Values in Column-major order |
List[Float], Values in Column-major order |
rotation: [1, -0.0068, 0.0010, 0.0068, 1, 0, -0.0010, 0, 1] |
translation |
Specify an extrinsic 3x1 matrix for translation. Values in Column-major order |
List[Float], Values in Column-major order |
translation: [0.01481, -0.0001, 0.0002] |