ds3d::FusedDetection Struct Reference
Detailed Description
Object fused bounding box description.
vector of data stored into FrameGuard, dims as [N, sizeof(FusedDetection)];
Definition at line 99 of file sources/includes/ds3d/common/ds3d_analysis_datatype.h.
Collaboration diagram for ds3d::FusedDetection:
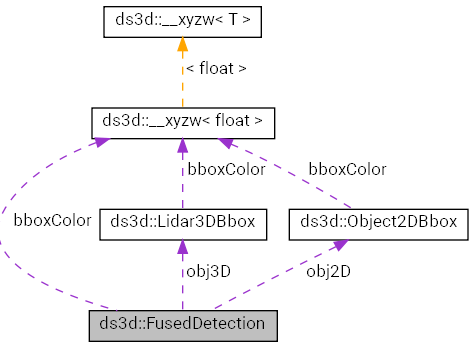
Data Fields | |
| Lidar3DBbox | obj3D |
| Object2DBbox | obj2D |
| float | score = 0.0f |
| vec4f | bboxColor = {{1.0f, 0, 0, 1.0f}} |
| char | labels [DS3D_MAX_LABEL_SIZE] = {0} |
Field Documentation
◆ bboxColor
| vec4f ds3d::FusedDetection::bboxColor = {{1.0f, 0, 0, 1.0f}} |
Definition at line 103 of file sources/includes/ds3d/common/ds3d_analysis_datatype.h.
◆ labels
| char ds3d::FusedDetection::labels = {0} |
Definition at line 104 of file sources/includes/ds3d/common/ds3d_analysis_datatype.h.
◆ obj2D
| Object2DBbox ds3d::FusedDetection::obj2D |
Definition at line 101 of file sources/includes/ds3d/common/ds3d_analysis_datatype.h.
◆ obj3D
| Lidar3DBbox ds3d::FusedDetection::obj3D |
Definition at line 100 of file sources/includes/ds3d/common/ds3d_analysis_datatype.h.
◆ score
| float ds3d::FusedDetection::score = 0.0f |
Definition at line 102 of file sources/includes/ds3d/common/ds3d_analysis_datatype.h.
The documentation for this struct was generated from the following files: