RShim Drivers and Usage
This section of the user manual describes installation and operation of NVIDIA® RShim drivers.
The Rshim drivers will be installed only on Windows Server 2012 R2 and above or Windows Client 10 Operating Systems.
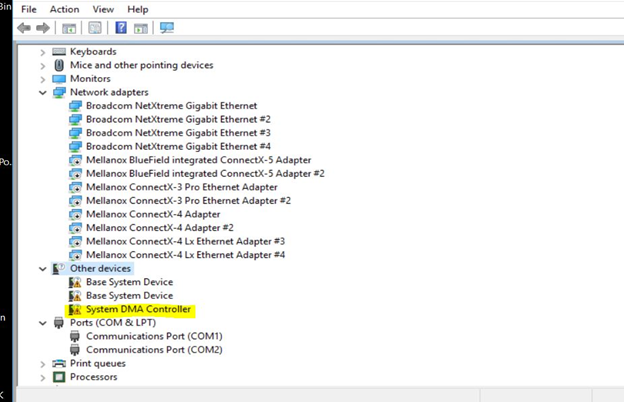
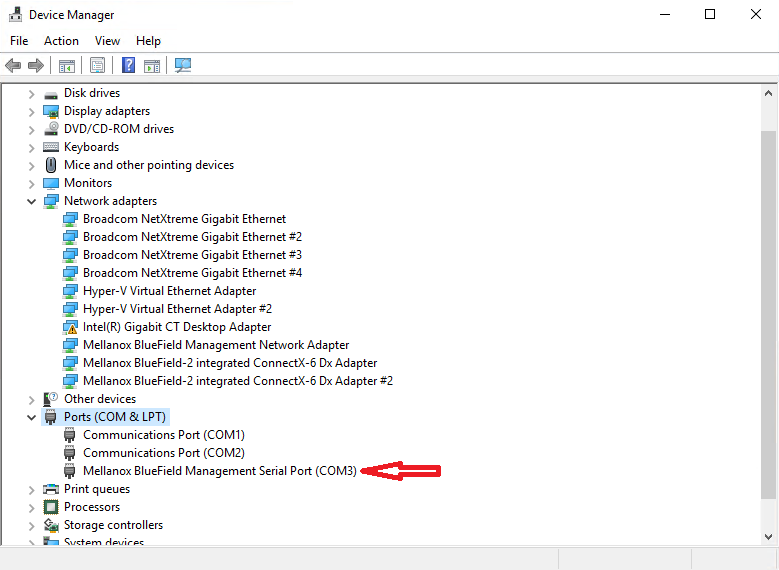
Open the Device Manager when no drivers are installed to make sure a new PCIe device is available as below.
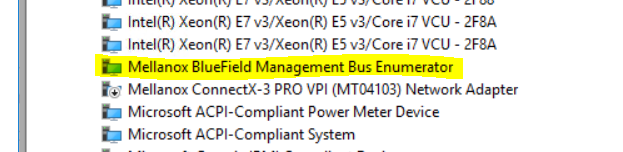
Run the installer to install all 3 drivers (MlxRshimBus.sys, MlxRshimCom.sys and MlxRshimEth.sys).
Make sure the Bus driver created 2 child devices after the installation (Com port and the Ethernet adapter).
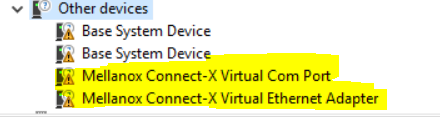

At this time, PuTTY application or any other network utility can be used to communicate with DPU via Virtual Com Port or Virtual Ethernet Adapter (ssh). The Com Port can be used using the 9600 baud-rate and default settings.
RShim drivers can be connect via PCIe (the drivers we are providing) or via USB (external connection) but not both at the same time. So when the bus driver detects that an external USB is already attached, it will not create the child virtual devices for data access. Access via PCIe is available once the USB connection is removed.
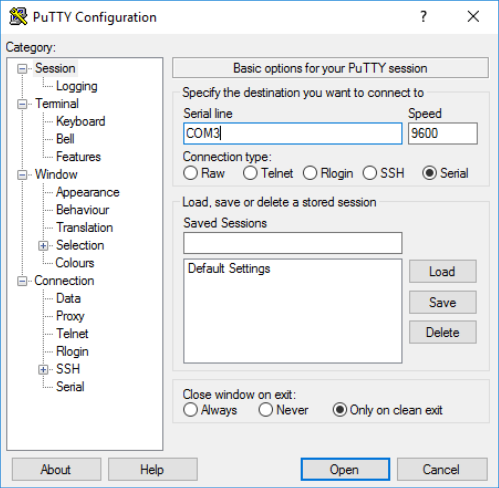
The BlueField DPU can be accessed via PuTTY or any other network utility application to communicate via virtual COM or virtual Ethernet adapter. To use COM:
Open Putty.
Change connection type to Serial.
Run the following command in order to know what to set the "Serial line" field to:
C:\Users\username\Desktop> reg query HKLM\HARDWARE\DEVICEMAP\SERIALCOMM | findstr MlxRshim \MlxRshim\COM3 REG-SZ COM3
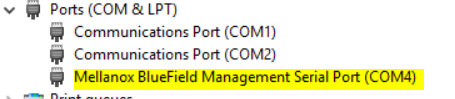
In this case use COM3. This name can also be found via Device Manager under "Ports (Com & LPT)".
Press Open and hit Enter.
To access via BlueField management network adapter, configure an IP address as shown in the example below and run a ping test to confirm configuration.
The device does not support any type of stateful or stateless offloads. This is indicated to the Operating System accordingly when the driver loads. The MAC address is a pre-defined MAC address (CA-FE-01-CA-FE-02). The following registry keys can be used to change basic settings such as MAC address.
Registry Name | Description | Valid Values |
HKLM\SYSTEM\CurrentControlSet\Control\Class\{4d36e972-e325-11ce-bfc1-08002be10318}\<nn>\*JumboPacket | The size, in bytes, of the largest supported Jumbo Packet (an Ethernet frame that is greater than 1514 bytes) that the hardware can support. | 1514 (default) - 2048 |
HKLM\SYSTEM\CurrentControlSet\Control\Class\{4d36e972-e325-11ce-bfc1-08002be10318}\<nn>\*NetworkAddress | The network address of the device. The format for a MAC address is: XX-XX-XX-XX-XX-XX. | CA-FE-01-CA-FE-02 (default) |
HKLM\SYSTEM\CurrentControlSet\Control\Class\{4d36e972-e325-11ce-bfc1-08002be10318}\<nn>\ReceiveBuffers | The number of receive descriptors used by the miniport adapter. | 16 – 64 (Default) |
Update the MAC address manually using registry key if there are more than one BlueField DPU in the system.
This driver does all the read/write work to the hardware registers. User space application can send down IOCTL’s to restart the system on chip or to push a new BlueField boot stream image.
RShimCmd is a command line tool that enables the user to:
Restart the DPU.
Push a boot stream file (.bfb). A .bfb file is a generated BlueField boot stream file that contains Linux operating system image that runs on the DPU. BFB files can be downloaded from the NVIDIA DOCA SDK webpage.
Usage | RshimCmd -RestartSmartNic <Option> -BusNum <BusNum> |
Example | RshimCmd -EnumDevices RshimCmd -PushImage c:\bin\MlnxBootImage.bfb -BusNum 11 RshimCmd -RestartSmartNic 1 -BusNum 11 |
Detailed Usage | RshimCmd -h |
The BFB image can be either CentOS or Ubuntu. Ubuntu credentials are: ubuntu/ubuntu and for Centos credentials are: root/centos, IP address of RShim Ethernet component (called tmfifo_net0) on the BlueField side is 192.168.100.2/30 by default. Please set IP address on the Windows side accordingly to be able to communicate via SSH.
Bluefield's UEFI system boot options and more can be customized during the BFB Installation through the use of configuration parameters in the bf.cfg file. For further information on the bf.cfg file, refer to the BlueField Documentation.
To include the bf.cfg file into the BFB installation, append the file to BFB file as described below:
Copy the BFB file to a local folder. For example:
Copy <path>\DOCA_1.
4.0_BSP_3.9.2_Ubuntu_20.04-5.20220707.bfb c:\bf\MlnxBootImage.bfbAppend the bf.cfg file into the BFB file.
Cd c:\bf Copy /b MlnxBootImage.bfb + bf.cfg MlnxBootImage_with_bf_cfg.bfb
Download the BFB image.
RshimCmd -PushImage c:\bf\MlnxBootImage_with_bf_cfg.bfb -BusNum
11
As the bf.cfg is intended for Linux OSes, it should be created according to Linux rules. For example, the lines of this text file should end in LF and not in CR/LF as accepted in Windows.
All the syntax should be as the accepted by the OS expects. For example, there should be no spaces in the middle of "set" statements: NET_RSHIM_MAC=00:1a:ca:ff:ff:05
All driver logging is part of the Mellanox-WinOF2-Kernel trace session that comes with the network drivers installation. The default location to the trace is at %SystemRoot%\system32\LogFiles\Mlnx\Mellanox-WinOF2-System.etl.
The following are the Event logs RShim drivers generate:
RShim Bus Driver
Event ID | Severity | Message |
2 | Informational | RShim Bus driver loaded successfully. |
3 | Informational | Device successfully stopped. |
4 | Error | The SmartNic adapter card seems to be stuck as the boot fifo data is not being drained. |
5 | Error | Driver startup failed due to failure in creation of the child device. |
6 | Error | Smartnic is in a bad state. Please restart smartnic and reload bus drivers. Please refer to user manual on how to restart smartnic. |
7 | Warning | Smartnic is in LiveFish mode. |
8 | Warning | Failed creating child virtual devices as a backend USB device is attached and accessing RShim FIFO. Please refer to user manual for more details. |
RShim Serial Driver
Event ID | Severity | Message |
2 | Informational | RShim Serial driver loaded successfully. |
3 | Informational | device successfully stopped. |
RShim Ethernet Driver
Event ID | Severity | Message |
2 | Error | MAC Address read from registry is not supported. Please set valid unicast address. |
3 | Informational | device is successfully stopped. |
4 | Warning | value read from registry is invalid. Therefore use the default value. |
5 | Error | SmartNic seems stuck as transmit packets are not being drained. |
6 | Informational | RShim Ethernet driver loaded successfully. |
As DevX is not enabled by default to work in WinOF-2 driver, manual configuration is required as described below:
Open Device manager and locate the NVIDIA® (Mellanox) device.
Right click and open the Properties.
Go to the Details tab.
Select the Driver key in the Property list.
Save the value you received.
For example: “{4d36e972-e325-11ce-bfc1-08002be10318}\0003”Open the registry editor (in console type regedit).
Navigate to HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Class
Select the class as shown in the driver key you extracted in step 5.
For example: {4d36e972-e325-11ce-bfc1-08002be10318}.Select the device number as in step 5.
For example: 0003.Create a new key with name DevxEnabled of type DWORD and set the value ‘1’.
Restart the driver. DevX Lib will be able to detect your device now.
Verify DevX=True for the enabled adapter, run "cmd mlx5cmd -stat”
How to Integrate Windows DevX in Your Development Environment
Find the MLNX_WinOF2_DevX_SDK_<version>.exe file in the WinOF-2 driver package located in the "DevX_SDK" folder.
Example: C:\Program Files\Mellanox\Mlnx_WinOF2\DevX_SDKInstall the SDK in your development system.
The SDK will expose the following new environment variables required for the library detection:
- variable name: DEVX_LIB_PATH will be the path to the DevX lib file
- variable name: DEVX_INC_PATH will be the path to the DevX header filesMake sure you update your session before start compiling.
In case the library is installed, and the environment variable does not exist, you may export the environment variable manually to point to the SDK path.
DOCA Communication Channel API
DOCA Communication Channel API allows developers to write client applications running on Windows native hosts or Windows Virtual Machines to exchange messages with service applications running on BlueField-2 DPU.
This feature is supported only when NVIDIA BlueField-2 DPU is in Ethernet mode.
The following are the dependencies required to enable DOCA Communication Channel API:
DevX Interface. To enable DevX Interface, please see section DevX Interface above.
SR-IOV enabled when using a Windows Virtual Machine. See section SR-IOV over Hyper-V.
Guest RDMA. See section Configuring Guest RDMA for Windows Server 2016.