Overview
The Separable Image Convolver algorithm performs a 2D convolution operation, but takes advantage of the fact that the 2D kernel is separable. The user passes one horizontal and one vertical 1D kernel. This usually leads to better performance, especially for kernels larger than 5x5. For smaller kernels, it's preferable to use Image Convolver algorithm with a 2D kernel directly.
| Input | Sobel kernel | Output |
|---|---|---|
 | \begin{eqnarray*} k_{col} &=& \frac{1}{64} \begin{bmatrix} 1 \\ 6 \\ 15 \\ 20 \\ 15 \\ 6 \\ 1 \end{bmatrix} \\ k_{row} &=& \begin{bmatrix} -1 & -5 & -6 & 0 & 6 & 5 & 1 \end{bmatrix} \end{eqnarray*} | 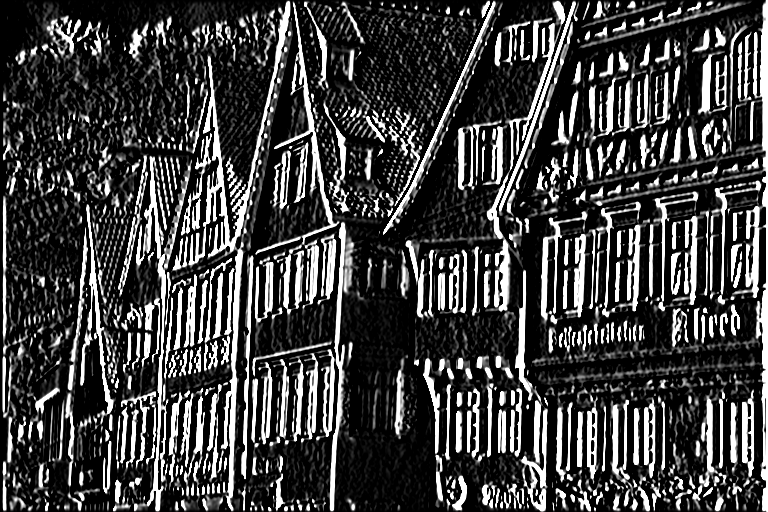 |
Implementation
Discrete 2D convolution is implemented using the following discrete function:
\begin{eqnarray*} I'[x,y] &=& \sum_{m=0}^{k_w} K_{row}[m] \times I[x,y-(m - \lfloor k_w/2 \rfloor)] \\ I''[x,y] &=& \sum_{m=0}^{k_h} K_{col}[m] \times I'[x-(m - \lfloor k_h/2 \rfloor),y] \end{eqnarray*}
Where:
- \(I\) is the input image.
- \(I'\) is the temporary image with convolution along the rows.
- \(I''\) is the final result.
- \(K_{row}\) is the row convolution kernel.
- \(K_{col}\) is the column convolution kernel.
- \(k_w,k_h\) are the kernel's width and height, respectively.
- Note
- Most computer vision libraries expect the kernel to be reversed before calling their convolution functions. Not so with VPI, we implement a actual convolution, not cross-correlation. Naturally, this is irrelevant if the kernel is symmetric.
Usage
- Initialization phase
- Include the header that defines the needed functions and structures. #include <vpi/algo/SeparableImageConvolver.h>
- Define the stream on which the algorithm will be executed, the input and output images.
- Create the output image. uint32_t w,h;vpiImageGetSize(input, &w, &h);VPIImageType type;vpiImageGetType(input, &type);VPIImage output;vpiImageCreate(w, h, type, 0, &output);
- Include the header that defines the needed functions and structures.
- Processing phase
- Define the kernel to be used. In this case, a simple 3x3 edge detector. float sobel_row[7] = {-1, -5, -6, 0, +6, +5, +1};float sobel_col[7] = {1/64.f, 6/64.f, 15/64.f, 20/64.f, 15/64.f, 6/64.f, 1/64.f};
- Submit the algorithm to the stream, passing the kernel, input, output images and boundary condition. VPI_CHECK_STATUS(vpiSubmitSeparableImageConvolver(stream, input, output,sobel_row, 7, sobel_col, 7, VPI_BOUNDARY_COND_ZERO));
- Optionally, wait until the processing is done. vpiStreamSync(stream);
- Define the kernel to be used. In this case, a simple 3x3 edge detector.
Consult the Image Convolution for a complete example.
Limitations and Constraints
Constraints for specific backends supersede the ones specified for all backends.
All Backends
- Input and output images must have the same dimensions and type.
- The following image types are accepted:
- Minimum 1D convolution kernel size is 1, maximum is 11.
- The following boundary conditions are accepted.
PVA
- Input and output dimensions must be between 160x92 and 3264x2448.
- Minimum 1D convolution kernel size is 2, maximum is 11.
- Horizontal and vertical kernel sizes must be equal, i.e., only square kernels can be used.
- Kernel weights are restricted to \(|weight| < 1\).
- The following image types are accepted:
- The following boundary conditions are accepted.