Data Structures | |
| struct | VPIKLTBoundingBoxTrackerParams |
| Structure that defines the parameters for vpiCreateKLTBoundingBoxTracker. More... | |
| struct | VPIKLTTrackedBoundingBox |
| Stores a bounding box that is being tracked by KLT Tracker. More... | |
Enumerations | |
| enum | VPIKLTBoundingBoxTrackerType { VPI_KLT_INVERSE_COMPOSITIONAL } |
| KLT Tracker type. More... | |
Functions | |
| VPIStatus | vpiCreateKLTBoundingBoxTracker (VPIStream stream, uint32_t imageWidth, uint32_t imageHeight, VPIImageType imageType, VPIPayload *payload) |
| Creates payload for vpiSubmitKLTBoundingBoxTracker. More... | |
| VPIStatus | vpiSubmitKLTBoundingBoxTracker (VPIPayload payload, VPIImage templateImage, VPIArray inputBoxList, VPIArray inputPredictionList, VPIImage referenceImage, VPIArray outputBoxList, VPIArray outputEstimationList, const VPIKLTBoundingBoxTrackerParams *params) |
| Runs KLT Tracker on two frames. More... | |
Detailed Description
Runs KLT Tracking on two frames.
Data Structure Documentation
◆ VPIKLTBoundingBoxTrackerParams
| struct VPIKLTBoundingBoxTrackerParams |
Structure that defines the parameters for vpiCreateKLTBoundingBoxTracker.
- Parameters
-
thresholdUpdate [in] threshold to update template thresholdKill [in] threshold to kill tracking thresholdStop [in] threshold to stop iteration maxScaleChange [in] maximum scale change for valid tracking maxTranslationChange [in] maximum translation change for valid tracking imageType [in] input image type
Definition at line 103 of file KLTBoundingBoxTracker.h.
 Collaboration diagram for VPIKLTBoundingBoxTrackerParams:
Collaboration diagram for VPIKLTBoundingBoxTrackerParams:| Data Fields | ||
|---|---|---|
| float | maxScaleChange |
Maximum relative scale change. Scale changes larger than this will make KLT consider that tracking was lost. |
| float | maxTranslationChange |
Maximum relative translation change. Translation changes larger than this will make KLT consider that tracking was lost. |
| float | nccThresholdKill |
Threshold to consider template tracking was lost. Must be a value between 0 and 1. |
| float | nccThresholdStop | Threshold to stop estimating. |
| float | nccThresholdUpdate |
Threshold for requiring template update. Must be a value between 0 and 1. |
| uint32_t | numberOfIterationsScaling | Number of Inverse compositional iterations of scale estimations. |
| VPIKLTBoundingBoxTrackerType | trackingType | Type of KLT tracking that will be performed. |
◆ VPIKLTTrackedBoundingBox
| struct VPIKLTTrackedBoundingBox |
Stores a bounding box that is being tracked by KLT Tracker.
Collaboration diagram for VPIKLTTrackedBoundingBox: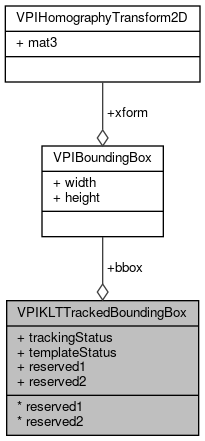
| Data Fields | ||
|---|---|---|
| VPIBoundingBox | bbox | Bounding box being tracked. |
| uint8_t | reserved1 | Reserved for future use. |
| uint8_t | reserved2 | Reserved for future use. |
| uint8_t | templateStatus |
Status of the template related to this bounding box. Accepted values:
|
| uint8_t | trackingStatus |
Tracking status of this bounding box. Accepted values:
|
Enumeration Type Documentation
◆ VPIKLTBoundingBoxTrackerType
#include <vpi/algo/KLTBoundingBoxTracker.h>
KLT Tracker type.
| Enumerator | |||
|---|---|---|---|
| VPI_KLT_INVERSE_COMPOSITIONAL | Inverse compositional algorithm for KLT tracker. The inverse compositional algorithm is a reformulation of the classic Lucas-Kanade algorithm to make the steepest-descent images and Hessian constant.
| ||
Definition at line 79 of file KLTBoundingBoxTracker.h.
Function Documentation
◆ vpiCreateKLTBoundingBoxTracker()
| VPIStatus vpiCreateKLTBoundingBoxTracker | ( | VPIStream | stream, |
| uint32_t | imageWidth, | ||
| uint32_t | imageHeight, | ||
| VPIImageType | imageType, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/KLTBoundingBoxTracker.h>
Creates payload for vpiSubmitKLTBoundingBoxTracker.
- Parameters
-
stream [in] a stream handle imageWidth [in] input image width imageHeight [in] input image height imageType [in] input image type payload [out] pointer to a payload handle
- Returns
- an error code on failure else VPI_SUCCESS
◆ vpiSubmitKLTBoundingBoxTracker()
| VPIStatus vpiSubmitKLTBoundingBoxTracker | ( | VPIPayload | payload, |
| VPIImage | templateImage, | ||
| VPIArray | inputBoxList, | ||
| VPIArray | inputPredictionList, | ||
| VPIImage | referenceImage, | ||
| VPIArray | outputBoxList, | ||
| VPIArray | outputEstimationList, | ||
| const VPIKLTBoundingBoxTrackerParams * | params | ||
| ) |
#include <vpi/algo/KLTBoundingBoxTracker.h>
Runs KLT Tracker on two frames.
Outputs tracked bounding boxes and estimated transform array.
- Parameters
-
payload [in] payload created with vpiCreateKLTBoundingBoxTracker referenceImage [in] reference image templateImage [in] template image inputBoxList [in] input bounding box array, must have type VPI_ARRAY_TYPE_KLT_TRACKED_BOUNDING_BOX inputPredictionList [in] input predicted transform array, must have type VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D params [in] parameters for the KLT tracker outputBoxList [out] output bounding box array, must have type VPI_ARRAY_TYPE_KLT_TRACKED_BOUNDING_BOX outputEstimationList [out] estimated transform array, must have type VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D
- Returns
- an error code on failure else VPI_SUCCESS