FFT
Overview
The FFT application outputs a spectrum representation of an input image, saving it into an image file on disk. You can define what backend will be used for processing.
Instructions
The command line parameters are:
<backend> <input image>
where
- backend: either cpu or cuda; it defines the backend that will perform the processing.
- input image: input image file name; it accepts png, jpeg and possibly others.
Here's one example:
- C++ ./vpi_sample_07_fft cuda ../assets/kodim08.png
- Python python3 main.py cuda ../assets/kodim08.png
This is using the CUDA backend and one of the provided sample images. You can try with other images, respecting the constraints imposed by the algorithm.
See Also
Results
| Input image | Output image, spectrum |
|---|---|
 | 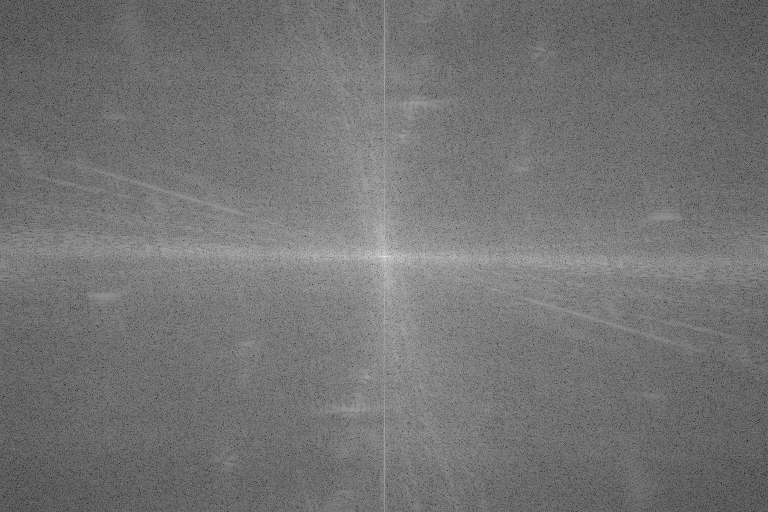 |
Source Code
For convenience, here's the code that is also installed in the samples directory.
Language: 109 throw std::runtime_error("Backend '" + strBackend + "' not recognized, it must be either cpu or cuda.");
138 CHECK_STATUS(vpiImageCreate(cvImage.cols / 2 + 1, cvImage.rows, VPI_IMAGE_FORMAT_2F32, 0, &spectrum));
142 vpiCreateFFT(backend, cvImage.cols, cvImage.rows, VPI_IMAGE_FORMAT_F32, VPI_IMAGE_FORMAT_2F32, &fft));
161 CHECK_STATUS(vpiImageLockData(spectrum, VPI_LOCK_READ, VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR, &outData));
Declares functions that handle image format conversion.
Declares functions that implement the Fast Fourier Transform algorithm and its inverse.
#define VPI_IMAGE_FORMAT_2F32
Single plane with two interleaved 32-bit floating point channels.
Definition: ImageFormat.h:142
#define VPI_IMAGE_FORMAT_F32
Single plane with one 32-bit floating point channel.
Definition: ImageFormat.h:136
Functions and structures for dealing with VPI images.
Functions for handling OpenCV interoperability with VPI.
Declaration of VPI status codes handling functions.
Declares functions dealing with VPI streams.
VPIStatus vpiSubmitConvertImageFormat(VPIStream stream, uint64_t backend, VPIImage input, VPIImage output, const VPIConvertImageFormatParams *params)
Converts the image contents to the desired format, with optional scaling and offset.
VPIStatus vpiCreateFFT(uint64_t backends, int32_t inputWidth, int32_t inputHeight, const VPIImageFormat inFormat, const VPIImageFormat outFormat, VPIPayload *payload)
Creates payload for direct Fast Fourier Transform algorithm.
VPIStatus vpiSubmitFFT(VPIStream stream, uint64_t backend, VPIPayload payload, VPIImage input, VPIImage output, uint64_t flags)
Runs the direct Fast Fourier Transform on single image.
VPIImagePlanePitchLinear planes[VPI_MAX_PLANE_COUNT]
Data of all image planes in pitch-linear layout.
Definition: Image.h:164
int64_t offsetBytes
Offset in bytes from pBase to the first column of the first plane row.
Definition: Image.h:137
int32_t pitchBytes
Difference in bytes of beginning of one row and the beginning of the previous.
Definition: Image.h:134
VPIStatus vpiImageLockData(VPIImage img, VPILockMode mode, VPIImageBufferType bufType, VPIImageData *data)
Acquires the lock on an image object and returns the image contents.
VPIStatus vpiImageCreate(int32_t width, int32_t height, VPIImageFormat fmt, uint64_t flags, VPIImage *img)
Create an empty image instance with the specified flags.
@ VPI_IMAGE_BUFFER_HOST_PITCH_LINEAR
Host-accessible with planes in pitch-linear memory layout.
Definition: Image.h:176
VPIStatus vpiImageCreateWrapperOpenCVMat(const cv::Mat &mat, VPIImageFormat fmt, uint64_t flags, VPIImage *img)
Wraps a cv::Mat in an VPIImage with the given image format.
Definition: OpenCVInterop.hpp:117
VPIStatus vpiStreamSync(VPIStream stream)
Blocks the calling thread until all submitted commands in this stream queue are done (queue is empty)...
void vpiStreamDestroy(VPIStream stream)
Destroy a stream instance and deallocate all HW resources.
VPIStatus vpiStreamCreate(uint64_t flags, VPIStream *stream)
Create a stream instance.