CUDA for Tegra
This application note provides an overview of NVIDIA® Tegra® memory architecture and considerations for porting code from a discrete GPU (dGPU) attached to an x86 system to the Tegra® integrated GPU (iGPU). It also discusses EGL interoperability.
1. Overview
This document provides an overview of NVIDIA® Tegra® memory architecture and considerations for porting code from a discrete GPU (dGPU) attached to an x86 system to the Tegra® integrated GPU (iGPU). It also discusses EGL interoperability.
This guide is for developers who are already familiar with programming in CUDA, and C/C++, and who want to develop applications for the Tegra® SoC.
Performance guidelines, best practices, terminology, and general information provided in the CUDA C++ Programming Guide and the CUDA C++ Best Practices Guide are applicable to all CUDA-capable GPU architectures, including Tegra® devices.
The CUDA C++ Programming Guide and the CUDA C Best Practices Guide are available at the following web sites:
CUDA C++ Programming Guide:
http://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html
CUDA C++ Best Practices Guide:
http://docs.nvidia.com/cuda/cuda-c-best-practices-guide/index.html
2. Memory Management
In Tegra® devices, both the CPU (Host) and the iGPU share SoC DRAM memory. A dGPU with separate DRAM memory can be connected to the Tegra® device over PCIe or NVLink. It is currently supported only on NVIDIA DRIVE platform.
An overview of a dGPU-connected Tegra® memory system is shown in Figure 1.
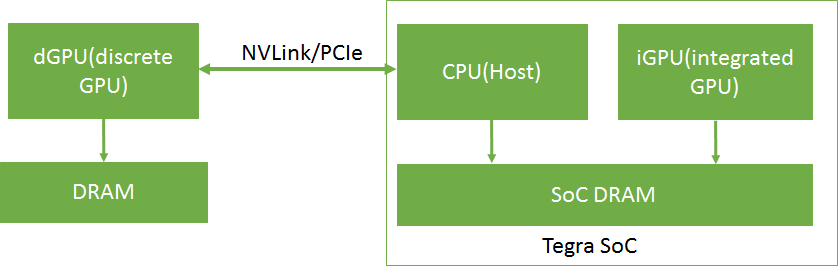
In Tegra®, device memory, host memory, and unified memory are allocated on the same physical SoC DRAM. On a dGPU, device memory is allocated on the dGPU DRAM. The caching behavior in a Tegra® system is different from that of an x86 system with a dGPU. The caching and accessing behavior of different memory types in a Tegra® system is shown in Table 1.
| Memory Type | CPU | iGPU | Tegra®-connected dGPU |
| Device memory | Not directly accessible | Cached | Cached |
| Pageable host memory | Cached | Not directly accessible | Not directly accessible |
| Pinned host memory |
Uncached where compute capability is less than 7.2. Cached where compute capability is greater than or equal to 7.2. |
Uncached | Uncached |
| Unified memory | Cached | Cached | Not supported |
On Tegra®, because device memory, host memory, and unified memory are allocated on the same physical SoC DRAM, duplicate memory allocations and data transfers can be avoided.
3. Porting Considerations
CUDA applications originally developed for dGPUs attached to x86 systems may require modifications to perform efficiently on Tegra® systems. This section describes the considerations for porting such applications to a Tegra® system, such as selecting an appropriate memory buffer type (pinned memory, unified memory, and others) and selecting between iGPU and dGPU, to achieve efficient performance for the application.
3.1. Memory Selection
CUDA applications can use various kinds of memory buffers, such as device memory, pageable host memory, pinned memory, and unified memory. Even though these memory buffer types are allocated on the same physical device, each has different accessing and caching behaviors, as shown in Table 1. It is important to select the most appropriate memory buffer type for efficient application execution.
Device Memory
Use device memory for buffers whose accessibility is limited to the iGPU. For example, in an application with multiple kernels, there may be buffers that are used only by the intermediate kernels of the application as input or output. These buffers are accessed only by the iGPU. Such buffers should be allocated with device memory.
Pageable Host Memory
Use pageable host memory for buffers whose accessibility is limited to the CPU.
Pinned Memory
Tegra® systems with different compute capabilities exhibit different behavior in terms of I/O coherency. For example, Tegra® systems with compute capability greater than or equal to 7.2 are I/O coherent and others are not I/O coherent. On Tegra® systems with I/O coherency, the CPU access time of pinned memory is as good as pageable host memory because it is cached on the CPU. However, on Tegra® systems without I/O coherency, the CPU access time of pinned memory is higher, because it is not cached on the CPU.
Pinned memory is recommended for small buffers because the caching effect is negligible for such buffers and also because pinned memory does not involve any additional overhead, unlike Unified Memory. With no additional overhead, pinned memory is also preferable for large buffers if the access pattern is not cache friendly on iGPU. For large buffers, when the buffer is accessed only once on iGPU in a coalescing manner, performance on iGPU can be as good as unified memory on iGPU.
Unified Memory
Unified memory is cached on the iGPU and the CPU. On Tegra®, using unified memory in applications requires additional coherency and cache maintenance operations during the kernel launch, synchronization and prefetching hint calls. This coherency maintenance overhead is slightly higher on a Tegra® system with compute capability less than 7.2 as they lack I/O coherency.
On Tegra® devices with I/O coherency (with a compute capability of 7.2 or greater) where unified memory is cached on both CPU and iGPU, for large buffers which are frequently accessed by the iGPU and the CPU and the accesses on iGPU are repetitive, unified memory is preferable since repetitive accesses can offset the cache maintenance cost. On Tegra® devices without I/O coherency (with a compute capability of less than 7.2), for large buffers which are frequently accessed by the CPU and the iGPU and the accesses on iGPU are not repetitive, unified memory is still preferable over pinned memory because pinned memory is not cached on both CPU and iGPU. That way, the application can take advantage of unified memory caching on the CPU.
Pinned memory or unified memory can be used to reduce the data transfer overhead between CPU and iGPU as both memories are directly accessible from the CPU and the iGPU. In an application, input and output buffers that must be accessible on both the host and the iGPU can be allocated using either unified memory or pinned memory.
Evaluate the impact of unified memory overheads, pinned memory cache misses, and device memory data transfers in applications to determine the correct memory selection.
3.2. Pinned Memory
This section provides guidelines for porting applications that use pinned memory allocations in x86 systems with dGPUs to Tegra®. CUDA applications developed for a dGPU attached to x86 system use pinned memory to reduce data transfer time and to overlap data transfers with kernel execution time. For specific information on this topic, see “Data Transfer Between Host and Device” and “Asynchronous and Overlapping Transfers with Computation” at the following websites.
“Data Transfer Between Host and Device”:
“Asynchronous and Overlapping Transfers with Computation”:
On Tegra® systems with no I/O coherency, repetitive access of pinned memory degrades application performance, because pinned memory is not cached on the CPU in such systems.
A sample application is shown below in which a set of filters and operations (k1, k2, and k3) are applied to an image. Pinned memory is allocated to reduce data transfer time on an x86 system with a dGPU, increasing the overall application speed. However, targeting a Tegra® device with the same code causes a drastic increase in the execution time of the readImage() function because it repeatedly accesses an uncached buffer. This increases the overall application time. If the time taken by readImage() is significantly higher compared to kernels execution time, it is recommended to use unified memory to reduce the readImage() time. Otherwise, evaluate the application with pinned memory and unified memory by removing unnecessary data transfer calls to decide best suited memory.
// Sample code for an x86 system with a discrete GPU int main() { int *h_a,*d_a,*d_b,*d_c,*d_d,*h_d; int height = 1024; int width = 1024; size_t sizeOfImage = width * height * sizeof(int); // 4MB image //Pinned memory allocated to reduce data transfer time cudaMallocHost(h_a, sizeOfImage); cudaMallocHost(h_d, sizeOfImage); //Allocate buffers on GPU cudaMalloc(&d_a, sizeOfImage); cudaMalloc(&d_b, sizeOfImage); cudaMalloc(&d_c, sizeOfImage); cudaMalloc(&d_d, sizeOfImage); //CPU reads Image; readImage(h_a); // Intialize the h_a buffer // Transfer image to GPU cudaMemcpy(d_a, h_a, sizeOfImage, cudaMemcpyHostToDevice); // Data transfer is fast as we used pinned memory // ----- CUDA Application pipeline start ---- k1<<<..>>>(d_a,d_b) // Apply filter 1 k2<<<..>>>(d_b,d_c)// Apply filter 2 k3<<<..>>>(d_c,d_d)// Some operation on image data // ----- CUDA Application pipeline end ---- // Transfer processed image to CPU cudaMemcpy(h_d, d_d, sizeOfImage, cudaMemcpyDeviceToHost); // Data transfer is fast as we used pinned memory // Use processed Image i.e h_d in later computations on CPU. UseImageonCPU(h_d); } // Porting the code on Tegra int main() { int *h_a,*d_b,*d_c,*h_d; int height = 1024; int width = 1024; size_t sizeOfImage = width * height * sizeof(int); // 4MB image //Unified memory allocated for input and output //buffer of application pipeline cudaMallocManaged(h_a, sizeOfImage,cudaMemAttachHost); cudaMallocManaged(h_d, sizeOfImage); //Intermediate buffers not needed on CPU side. //So allocate them on device memory cudaMalloc(&d_b, sizeOfImage); cudaMalloc(&d_c, sizeOfImage); //CPU reads Image; readImage (h_a); // Intialize the h_a buffer // ----- CUDA Application pipeline start ---- // Prefetch input image data to GPU cudaStreamAttachMemAsync(NULL, h_a, 0, cudaMemAttachGlobal); k1<<<..>>>(h_a,d_b) k2<<<..>>>(d_b,d_c) k3<<<..>>>(d_c,h_d) // Prefetch output image data to CPU cudaStreamAttachMemAsync(NULL, h_d, 0, cudaMemAttachHost); cudaStreamSynchronize(NULL); // ----- CUDA Application pipeline end ---- // Use processed Image i.e h_d on CPU side. UseImageonCPU(h_d); }
The cudaHostRegister() function
The cudaHostRegister() function is not supported on Tegra® devices with compute capability less than 7.2, because those devices do not have I/O coherency. Use other pinned memory allocation functions such as cudaMallocHost() and cudaHostAlloc() if cudaHostRegister() is not supported on the device.
3.3. Effective Usage of Unified Memory on Tegra
Using unified memory in applications requires additional coherency and cache maintenance operations at kernel launch, synchronization, and prefetching hint calls. These operations are performed synchronously with other GPU work which can cause unpredictable latencies in the application.
The performance of unified memory on Tegra® can be improved by providing data prefetching hints. The driver can use these prefetching hints to optimize the coherence operations. To prefetch the data, the cudaStreamAttachMemAsync() function can be used, in addition to the techniques described in the “Coherency and Concurrency” section of the CUDA C Programming Guide at the following link:
http://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#um-coherency-hd
to prefetch the data. The prefetching behavior of unified memory, as triggered by the changing states of the attachment flag, is shown in Table 2.
| Previous Flag | Current Flag | Prefetching Behavior |
| cudaMemAttachGlobal/cudaMemAttachSingle | cudaMemAttachHost | Causes prefetch to CPU |
| cudaMemAttachHost |
cudaMemAttachGlobal/ cudaMemAttachSingle |
Causes prefetch to GPU |
| cudaMemAttachGlobal | cudaMemAttachSingle | No prefetch to GPU |
| cudaMemAttachSingle | cudaMemAttachGlobal | No prefetch to GPU |
The following example shows usage of cudaStreamAttachMemAsync() to prefetch data.
However, not supported on Tegra® devices are the data prefetching techniques that use cudaMemPrefetchAsync() as described in the “Performance Tuning” section of the CUDA C++ Programming Guide at the following web site:
http://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#um-performance-tuning
__global__ void matrixMul(int *p, int *q, int*r, int hp, int hq, int wp, int wq) { // Matrix multiplication kernel code } void MatrixMul(int hp, int hq, int wp, int wq) { int *p,*q,*r; int i; size_t sizeP = hp*wp*sizeof(int); size_t sizeQ = hq*wq*sizeof(int); size_t sizeR = hp*wq*sizeof(int); //Attach buffers ‘p’ and ‘q’ to CPU and buffer ‘r’ to GPU cudaMallocManaged(&p, sizeP, cudaMemAttachHost); cudaMallocManaged(&q, sizeQ, cudaMemAttachHost); cudaMallocManaged(&r, sizeR); //Intialize with random values randFill(p,q,hp,wp,hq,wq); // Prefetch p,q to GPU as they are needed in computation cudaStreamAttachMemAsync(NULL, p, 0, cudaMemAttachGlobal); cudaStreamAttachMemAsync(NULL, q, 0, cudaMemAttachGlobal); matrixMul<<<....>>>(p,q,r, hp,hq,wp,wq); // Prefetch 'r' to CPU as only 'r' is needed cudaStreamAttachMemAsync(NULL, r, 0, cudaMemAttachHost); cudaStreamSynchronize(NULL); // Print buffer ‘r’ values for(i = 0; i < hp*wq; i++) printf("%d ", r[i]); }
An additional cudaStreamSynchronize(NULL) call can be added after the matrixMul kernel code to avoid callback threads that cause unpredictability in a cudaStreamAttachMemAsync() call.
3.4. GPU Selection
On a Tegra system with a dGPU, deciding whether a CUDA application runs on the iGPU or the dGPU can have implications for the performance of the application. Some of the factors that need to be considered while making such a decision are kernel execution time, data transfer time, data locality, and latency. For example, to run an application on a dGPU, data must be transferred between the SoC and the dGPU. This data transfer can be avoided if the application runs on an iGPU.
3.5. Synchronization Mechanism Selection
The cudaSetDeviceFlags API is used to control the synchronization behaviour of CPU thread.
Prior to CUDA 10.1, by default, the synchronization mechanism on iGPU uses cudaDeviceBlockingSync flag, which blocks the CPU thread on a synchronization primitive when waiting for the device to finish work. The cudaDeviceBlockingSync flag is suited for platforms with power constraints. But on platforms which require low latency, the cudaDeviceScheduleSpin flag must be set manually.
In CUDA 10.1 and later releases, the default synchronization flag is determined based on what is optimized for each platform.
More information about the synchronization flags is given at cudaSetDeviceFlags API documentation.
3.6. GPUDirect RDMA on Tegra
Starting CUDA 10.1, GPUDirect RDMA is supported on Jetson platform. This feature enables iGPU and PCIe devices to access the same memory. This will eliminate the overhead of extra memory copies from PCIe accessible memory to iGPU accessible memory, and vice versa.
3.7. CUDA Features Not Supported on Tegra
All core features of CUDA are supported on Tegra platforms. The exceptions are listed below.
- The cudaHostRegister() function is not supported on QNX systems. This is due to the limitations on QNX OS. It is supported in Linux systems with compute capability greater than or equal to 7.2.
- System wide atomics are not supported on Tegra devices with compute capability less than 7.2.
- Unified memory is not supported on dGPU attached to Tegra.
- cudaMemPrefetchAsync() function is not supported since unified memory with concurrent access is not yet supported on iGPU.
- NVIDIA management library (NVML) library is not supported on Tegra. However, as an alternative to monitor the resource utilization, tegrastats can be used.
- CUDA IPC (CUDA Inter-process communication) is not supported on Tegra devices. EGLStream or NvSci can be used to communicate between CUDA contexts in two processes.
- Remote direct memory access (RDMA) is supported only on Jetson AGX Xavier platform. On other Tegra platforms, this feature remains unsupported. See GPUDirect RDMA on Tegra for details.
- JIT compilation might require a considerable amount of CPU and bandwidth resources, potentially interfering with other workloads in the system. Thus, JIT compilations such as PTX-JIT and NVRTC JIT are not recommended for deterministic automotive applications and can be bypassed completely by compiling for specific GPU targets. JIT compilation is not supported on Tegra devices in the safe context.
- Multi process service (MPS) is not supported on Tegra.
- Peer to peer (P2P) communication calls are not supported on Tegra.
- The cuSOLVER library is not supported on in Tegra® systems running QNX.
- The nvGRAPH library is not supported.
More information on some of these features can be found at the following web sites:
IPC:
http://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#interprocess-communication
NVSCI:
RDMA:
http://docs.nvidia.com/cuda/gpudirect-rdma/index.html
MPS:
https://docs.nvidia.com/deploy/pdf/CUDA_Multi_Process_Service_Overview.pdf
P2P:
http://docs.nvidia.com/cuda/cuda-c-programming-guide/index.html#peer-to-peer-memory-access
4. EGL Interoperability
An interop is an efficient mechanism to share resources between two APIs. To share data with multiple APIs, an API must implement an individual interop for each.
EGL provides interop extensions that allow it to function as a hub connecting APIs, removing the need for multiple interops, and encapsulating the shared resource. An API must implement these extensions to interoperate with any other API via EGL. The CUDA supported EGL interops are EGLStream, EGLImage, and EGLSync.
EGL interop extensions allow applications to switch between APIs without the need to rewrite code. For example, an EGLStream-based application in which NvMedia is the producer and CUDA is the consumer can be modified to use OpenGL as the consumer without modifying the producer code.
4.1. EGLStream
EGLStream interoperability facilitates efficient transfer of a sequence of frames from one API to another API, allowing use of multiple Tegra® engines such as CPU, GPU, ISP, and others.
Consider an application where a camera captures images continuously, shares them with CUDA for processing, and then later renders those images using OpenGL. In this application, the image frames are shared across NvMedia, CUDA and OpenGL. The absence of EGLStream interoperability would require the application to include multiple interops and redundant data transfers between APIs. EGLStream has one producer and one consumer.
EGLStream offers the following benefits:
- Efficient transfer of frames between a producer and a consumer.
- Implicit synchronization handling.
- Cross-process support.
- dGPU and iGPU support.
- Linux, QNX, and Android operating system support.
4.1.1. EGLStream Flow
The EGLStream flow has the following steps:
- Initialize producer and consumer APIs
- Create an EGLStream and connect the consumer and the producer.
Note:
EGLStream is created using eglCreateStreamKHR() and destroyed using eglDestroyStreamKHR().
The consumer should always connect to EGLStream before the producer.
For more information see the EGLStream specification at the following web site: https://www.khronos.org/registry/EGL/extensions/KHR/EGL_KHR_stream.txt
- Allocate memory used for EGL frames.
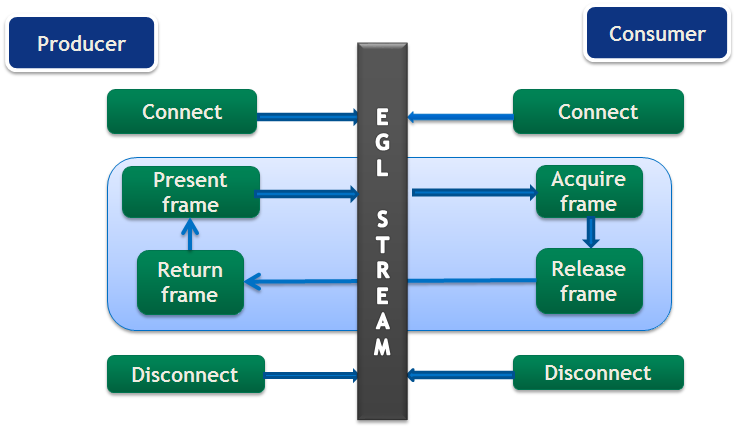
- The producer populates an EGL frame and presents it to EGLStream.
- The consumer acquires the frame from EGLStream and releases it back to EGLStream after processing.
- The producer collects the consumer-released frame from EGLStream.
- The producer presents the same frame, or a new frame to EGLStream.
- Steps 4-7 are repeated until completion of the task, with an old frame or a new frame.
- The consumer and the producer disconnect from EGLStream.
- Deallocate the memory used for EGL frames.
- De-initialize the producer and consumer APIs.
EGLStream application flow is shown in Figure 2.
CUDA producer and consumer functions are listed in Table 3.
| Role | Functionality | API |
| Producer | To connect a producer to EGLStream | |
| To present frame to EGLStream |
cuEGLStreamProducerPresentFrame() cudaEGLStreamProducerPresentFrame() |
|
| Obtain released frames |
cuEGLStreamProducerReturnFrame() cudaEGLStreamProducerReturnFrame() |
|
| To disconnect from EGLStream | ||
| Consumer | To connect a consumer to EGLStream |
cuEGLStreamConsumerConnect() cuEGLStreamConsumeConnectWithFlags() cudaEGLStreamConsumerConnect() cudaEGLStreamConsumerConnectWithFlags() |
| To acquire frame from EGLStream |
cuEGLStreamConsumerAcquireFrame() |
|
| To release the consumed frame |
cuEGLStreamConsumerReleaseFrame() cudaEGLStreamConsumerReleaseFrame() |
|
| To disconnect from EGLStream |
4.1.2. CUDA as Producer
When CUDA is the producer, the supported consumers are CUDA, NvMedia and OpenGL. API functions to be used when CUDA is the producer are listed in Table 3. Except for connecting and disconnecting from EGLStream, all API calls are non-blocking.
The following producer side steps are shown in the example code that follows:
- Prepare a frame (lines 3-19).
- Connect the producer to EGLStream (line 21).
- Populate the frame and present to EGLStream (lines 23-25).
- Get the released frame back from EGLStream (Line 27).
- Disconnect the consumer after completion of the task. (Line 31).
void ProducerThread(EGLStreamKHR eglStream) { //Prepares frame cudaEglFrame* cudaEgl = (cudaEglFrame *)malloc(sizeof(cudaEglFrame)); cudaEgl->planeDesc[0].width = WIDTH; cudaEgl->planeDesc[0].depth = 0; cudaEgl->planeDesc[0].height = HEIGHT; cudaEgl->planeDesc[0].numChannels = 4; cudaEgl->planeDesc[0].pitch = WIDTH * cudaEgl->planeDesc[0].numChannels; cudaEgl->frameType = cudaEglFrameTypePitch; cudaEgl->planeCount = 1; cudaEgl->eglColorFormat = cudaEglColorFormatARGB; cudaEgl->planeDesc[0].channelDesc.f=cudaChannelFormatKindUnsigned cudaEgl->planeDesc[0].channelDesc.w = 8; cudaEgl->planeDesc[0].channelDesc.x = 8; cudaEgl->planeDesc[0].channelDesc.y = 8; cudaEgl->planeDesc[0].channelDesc.z = 8; size_t numElem = cudaEgl->planeDesc[0].pitch * cudaEgl->planeDesc[0].height; // Buffer allocated by producer cudaMalloc(&(cudaEgl->pPitch[0].ptr), numElem); //CUDA producer connects to EGLStream cudaEGLStreamProducerConnect(&conn, eglStream, WIDTH, HEIGHT)) // Sets all elements in the buffer to 1 K1<<<...>>>(cudaEgl->pPitch[0].ptr, 1, numElem); // Present frame to EGLStream cudaEGLStreamProducerPresentFrame(&conn, *cudaEgl, NULL); cudaEGLStreamProducerReturnFrame(&conn, cudaEgl, eglStream); . . //clean up cudaEGLStreamProducerDisconnect(&conn); . }
A frame is represented as a cudaEglFramestructure. The frameType parameter in cudaEglFrame indicates the memory layout of the frame. The supported memory layouts are CUDA Array and device pointer. Any mismatch in the width and height values of frame with the values specified in cudaEGLStreamProducerConnect() leads to undefined behavior. In the sample, the CUDA producer is sending a single frame, but it can send multiple frames over a loop. CUDA cannot present more than 64 active frames to EGLStream.
The cudaEGLStreamProducerReturnFrame() call waits until it receives the released frame from the consumer. Once the CUDA producer presents the first frame to EGLstream, at least one frame is always available for consumer acquisition until the producer disconnects. This prevents the removal of the last frame from EGLStream, which would block cudaEGLStreamProducerReturnFrame().
Use the EGL_NV_stream_reset extension to set EGLStream attribute EGL_SUPPORT_REUSE_NV to false to allow the last frame to be removed from EGLStream. This allows removing or returning the last frame from EGLStream.
4.1.3. CUDA as Consumer
When CUDA is the consumer, the supported producers are CUDA, OpenGL, NvMedia, Argus, and Camera. API functions to be used when CUDA is the consumer are listed in Table 3. Except for connecting and disconnecting from EGLStream, all API calls are non-blocking.
The following consumer side steps are shown in the sample code that follows:
- Connect consumer to EGLStream (line 5).
- Acquire frame from EGLStream (lines 8-10).
- Process the frame on consumer (line 16).
- Release frame back to EGLStream (line 19).
- Disconnect the consumer after completion of the task (line 22).
void ConsumerThread(EGLStreamKHR eglStream) { . . //Connect consumer to EGLStream cudaEGLStreamConsumerConnect(&conn, eglStream); // consumer acquires a frame unsigned int timeout = 16000; cudaEGLStreamConsumerAcquireFrame(& conn, &cudaResource, eglStream, timeout); //consumer gets a cuda object pointer cudaGraphicsResourceGetMappedEglFrame(&cudaEgl, cudaResource, 0, 0); size_t numElem = cudaEgl->planeDesc[0].pitch * cudaEgl->planeDesc[0].height; . . int checkIfOne = 1; // Checks if each value in the buffer is 1, if any value is not 1, it sets checkIfOne = 0. K2<<<...>>>(cudaEgl->pPitch[0].ptr, 1, numElem, checkIfOne); . . cudaEGLStreamConsumerReleaseFrame(&conn, cudaResource, &eglStream); . . cudaEGLStreamConsumerDisconnect(&conn); . }
In the sample code, the CUDA consumer receives a single frame, but it can also receive multiple frames over a loop. If a CUDA consumer fails to receive a new frame in the specified time limit using cudaEGLStreamConsumerAcquireFrame(), it reacquires the previous frame from EGLStream. The time limit is indicated by the timeout parameter.
The application can use eglQueryStreamKHR() to query for the availability of new frames using. If the consumer uses already released frames, it results in undefined behavior. The consumer behavior is defined only for read operations. Behavior is undefined when the consumer writes to a frame.
If the CUDA context is destroyed while connected to EGLStream, the stream is placed in the EGL_STREAM_STATE_DISCONNECTED_KHR state and the connection handle is invalidated.
4.1.4. Implicit Synchronization
EGLStream provides implicit synchronization in an application. For example, in the previous code samples, both the producer and consumer threads are running in parallel and the K1 and K2 kernel processes access the same frame, but K2 execution in the consumer thread is guaranteed to occur only after kernel K1 in the producer thread finishes. The cudaEGLStreamConsumerAcquireFrame() function waits on the GPU side until K1 finishes and ensures synchronization between producer and consumer. The variable checkIfOne is never set to 0 inside the K2 kernel in the consumer thread.
Similarly, cudaEGLStreamProducerReturnFrame() in the producer thread is guaranteed to get the frame only after K2 finishes and the consumer releases the frame. These non-blocking calls allow the CPU to do other computation in between, as synchronization is taken care of on the GPU side.
The EGLStreams_CUDA_Interop CUDA sample code shows the usage of EGLStream in detail.
4.1.5. Data Transfer Between Producer and Consumer
Data transfer between producer and consumer is avoided when they are present on the same device. In a Tegra® platform that includes a dGPU however, such as is in NVIDIA DRIVE™ PX 2, the producer and consumer can be present on different devices. In that case, an additional memory copy is required internally to move the frame between Tegra® SoC DRAM and dGPU DRAM. EGLStream allows producer and consumer to run on any GPU without code modification.
4.1.6. EGLStream Pipeline
An application can use multiple EGL streams in a pipeline to pass the frames from one API to another. For an application where NvMedia sends a frame to CUDA for computation, CUDA sends the same frame to OpenGL for rendering after the computation.
The EGLStream pipeline is illustrated in Figure 3.

NvMedia and CUDA connect as producer and consumer respectively to one EGLStream. CUDA and OpenGL connect as producer and consumer respectively to another EGLStream.
Using multiple EGLStreams in pipeline fashion gives the flexibility to send frames across multiple APIs without allocating additional memory or requiring explicit data transfers. Sending a frame across the above EGLStream pipeline involves the following steps.
- NvMedia sends a frame to CUDA for processing.
- CUDA uses the frame for computation and sends to OpenGL for rendering.
- OpenGL consumes the frame and releases it back to CUDA.
- CUDA releases the frame back to NvMedia.
The above steps can be performed in a loop to facilitate the transfer of multiple frames in the EGLStream pipeline.
4.2. EGLImage
An EGLImage interop allows an EGL client API to share image data with other EGL client APIs. For example, an application can use an EGLImage interop to share an OpenGL texture with CUDA without allocating any additional memory. A single EGLImage object can be shared across multiple client APIs for modification.
An EGLImage interop does not provide implicit synchronization. Applications must maintain synchronization to avoid race conditions.
For more information see the EGLImage specification at the following web site:
https://www.khronos.org/registry/EGL/extensions/KHR/EGL_KHR_image_base.txt
4.2.1. CUDA interop with EGLImage
CUDA supports interoperation with EGLImage, allowing CUDA to read or modify the data of an EGLImage. An EGLImage can be a single or multi-planar resource. In CUDA, a single-planar EGLImage object is represented as a CUDA array or device pointer. Similarly, a multi-planar EGLImage object is represented as an array of device pointers or CUDA arrays. EGLImage is supported on Tegra® devices running the Linux, QNX, or Android operating systems.
Use the cudaGraphicsEGLRegisterImage() API to register an EGLImage object with CUDA. Registering an EGLImage with CUDA creates a graphics resource object. An application can use cudaGraphicsResourceGetMappedEglFrame() to get a frame from the graphics resource object. In CUDA, a frame is represented as a cudaEglFrame structure. The frameType parameter in cudaEglFrame indicates if the frame is a CUDA device pointer or a CUDA array. For a single planar graphics resource, an application can directly obtain a device pointer or CUDA array using cudaGraphicsResourceGetMappedPointer() or cudaGraphicsSubResourceGetMappedArray() respectively. A CUDA array can be bound to a texture or surface reference to access inside a kernel. Also, a multi-dimensional CUDA array can be read and written via cudaMemcpy3D().
The following sample code shows EGLImage interoperability. In the code, an EGLImage object eglImage is created using OpenGL texture. The eglImage object is mapped as a CUDA array pArray in CUDA. The pArray array is bound to a surface object to allow modification of the OpenGL texture in the changeTexture. The function checkBuf() checks if the texture is updated with new values.
int width = 256; int height = 256; int main() { . . unsigned char *hostSurf; unsigned char *pSurf; CUarray pArray; unsigned int bufferSize = WIDTH * HEIGHT * 4; pSurf= (unsigned char *)malloc(bufferSize); hostSurf = (unsigned char *)malloc(bufferSize); // Initialize the buffer for(int y = 0; y < HEIGHT; y++) { for(int x = 0; x < WIDTH; x++) { pSurf[(y*WIDTH + x) * 4 ] = 0; pSurf[(y*WIDTH + x) * 4 + 1] = 0; pSurf[(y*WIDTH + x) * 4 + 2] = 0; pSurf[(y*WIDTH + x) * 4 + 3] = 0; } } // NOP call to error-check the above glut calls GL_SAFE_CALL({}); //Init texture GL_SAFE_CALL(glGenTextures(1, &tex)); GL_SAFE_CALL(glBindTexture(GL_TEXTURE_2D, tex)); GL_SAFE_CALL(glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, WIDTH, HEIGHT, 0, GL_RGBA, GL_UNSIGNED_BYTE, pSurf)); EGLDisplay eglDisplayHandle = eglGetCurrentDisplay(); EGLContext eglCtx = eglGetCurrentContext(); // Create the EGL_Image EGLint eglImgAttrs[] = { EGL_IMAGE_PRESERVED_KHR, EGL_FALSE, EGL_NONE, EGL_NONE }; EGLImageKHR eglImage = eglCreateImageKHR(eglDisplayHandle, eglCtx, EGL_GL_TEXTURE_2D_KHR, (EGLClientBuffer)(intptr_t)tex, eglImgAttrs); glFinish(); glTexSubImage2D(GL_TEXTURE_2D, 0, 0, 0, WIDTH, HEIGHT, GL_RGBA, GL_UNSIGNED_BYTE, pSurf); glFinish(); // Register buffer with CUDA cuGraphicsEGLRegisterImage(&pResource, eglImage, 0); //Get CUDA array from graphics resource object cuGraphicsSubResourceGetMappedArray( &pArray, pResource, 0, 0); cuCtxSynchronize(); //Create a CUDA surface object from pArray CUresult status = CUDA_SUCCESS; CUDA_RESOURCE_DESC wdsc; memset(&wdsc, 0, sizeof(wdsc)); wdsc.resType = CU_RESOURCE_TYPE_ARRAY; wdsc.res.array.hArray = pArray; CUsurfObject writeSurface; cuSurfObjectCreate(&writeSurface, &wdsc); dim3 blockSize(32,32); dim3 gridSize(width/blockSize.x,height/blockSize.y); // Modifies the OpenGL texture using CUDA surface object changeTexture<<<gridSize, blockSize>>>(writeSurface, width, height); cuCtxSynchronize(); CUDA_MEMCPY3D cpdesc; memset(&cpdesc, 0, sizeof(cpdesc)); cpdesc.srcXInBytes = cpdesc.srcY = cpdesc.srcZ = cpdesc.srcLOD = 0; cpdesc.dstXInBytes = cpdesc.dstY = cpdesc.dstZ = cpdesc.dstLOD = 0; cpdesc.srcMemoryType = CU_MEMORYTYPE_ARRAY; cpdesc.dstMemoryType = CU_MEMORYTYPE_HOST; cpdesc.srcArray = pArray; cpdesc.dstHost = (void *)hostSurf; cpdesc.WidthInBytes = WIDTH * 4; cpdesc.Height = HEIGHT; cpdesc.Depth = 1; //Copy CUDA surface object values to hostSurf cuMemcpy3D(&cpdesc); cuCtxSynchronize(); unsigned char* temp = (unsigned char*)(malloc(bufferSize * sizeof(unsigned char))); // Get the modified texture values as GL_SAFE_CALL(glGetTexImage(GL_TEXTURE_2D, 0, GL_RGBA, GL_UNSIGNED_BYTE,(void*)temp)); glFinish(); // Check if the OpenGL texture got modified values checkbuf(temp,hostSurf); // Clean up CUDA cuGraphicsUnregisterResource(pResource); cuSurfObjectDestroy(writeSurface); . . } __global__ void changeTexture(cudaSurfaceObject_t arr, unsigned int width, unsigned int height){ unsigned int x = threadIdx.x + blockIdx.x * blockDim.x; unsigned int y = threadIdx.y + blockIdx.y * blockDim.y; uchar4 data = make_uchar4(1, 2, 3, 4); surf2Dwrite(data, arr, x * 4, y); } void checkbuf(unsigned char *ref, unsigned char *hostSurf) { for(int y = 0; y < height*width*4; y++){ if (ref[y] != hostSurf[y]) printf("mis match at %d\n",y); } }
Because EGLImage does not provide implicit synchronization, the above sample application uses glFinish() and cudaThreadSynchronize() calls to achieve synchronization. Both calls block the CPU thread. To avoid blocking the CPU thread, use EGLSync to provide synchronization. An example using EGLImage and EGLSync is shown in the following section.
4.3. EGLSync
EGLSync is a cross-API synchronization primitive. It allows an EGL client API to share its synchronization object with other EGL client APIs. For example, applications can use an EGLSync interop to share the OpenGL synchronization object with CUDA.
For more information see the EGLSync specification at the following web site:
https://www.khronos.org/registry/EGL/extensions/KHR/EGL_KHR_fence_sync.txt
4.3.1. CUDA Interop with EGLSync
In an imaging application, where two clients run on a GPU and share a resource, the absence of a cross-API GPU synchronization object forces the clients to use CPU-side synchronization to avoid race conditions. The CUDA interop with EGLSync allows the application to exchange synchronization objects between CUDA and other client APIs directly. This avoids the need for CPU-side synchronization and allows CPU to complete other tasks. In CUDA, an EGLSync object is mapped as a CUDA event.
4.3.2. Creating EGLSync from a CUDA Event
Creating an EGLSync object from a CUDA event is shown in the following sample code. Note that EGLSync object creation from a CUDA event should happen immediately after the CUDA event is recorded.
EGLDisplay dpy = eglGetCurrentDisplay(); // Create CUDA event cudaEvent_t event; cudaStream_t *stream; cudaEventCreate(&event); cudaStreamCreate(&stream); // Record the event with cuda event cudaEventRecord(event, stream); const EGLAttrib attribs[] = { EGL_CUDA_EVENT_HANDLE_NV, (EGLAttrib )event, EGL_NONE }; //Create EGLSync from the cuda event eglsync = eglCreateSync(dpy, EGL_NV_CUDA_EVENT_NV, attribs); //Wait on the sync eglWaitSyncKHR(...);
4.3.3. Creating a CUDA Event from EGLSync
Creating a CUDA event from an EGLSync object is shown in the following sample code.
EGLSync eglsync; EGLDisplay dpy = eglGetCurrentDisplay(); // Create an eglSync object from openGL fense sync object eglsync = eglCreateSyncKHR(dpy, EGL_SYNC_FENCE_KHR, NULL); cudaEvent_t event; cudaStream_t* stream; cudaStreamCreate(&stream); // Create CUDA event from eglSync cudaEventCreateFromEGLSync(&event, eglSync, cudaEventDefault); // Wait on the cuda event. It waits on GPU till OpenGL finishes its // task cudaStreamWaitEvent(stream, event, 0);
The same example given in the EGLImage section is re-written below to illustrate the usage of an EGLSync interop. In the sample code, the CPU blocking calls such as glFinish() and cudaThreadSynchronize() are replaced with EGLSync interop calls.
int width = 256; int height = 256; int main() { . . unsigned char *hostSurf; unsigned char *pSurf; cudaArray_t pArray; unsigned int bufferSize = WIDTH * HEIGHT * 4; pSurf= (unsigned char *)malloc(bufferSize); hostSurf = (unsigned char *)malloc(bufferSize); // Intialize the buffer for(int y = 0; y < bufferSize; y++) pSurf[y] = 0; //Init texture GL_SAFE_CALL(glGenTextures(1, &tex)); GL_SAFE_CALL(glBindTexture(GL_TEXTURE_2D, tex)); GL_SAFE_CALL(glTexImage2D(GL_TEXTURE_2D, 0, GL_RGBA, WIDTH, HEIGHT, 0, GL_RGBA, GL_UNSIGNED_BYTE, pSurf)); EGLDisplay eglDisplayHandle = eglGetCurrentDisplay(); EGLContext eglCtx = eglGetCurrentContext(); cudaEvent_t cuda_event; cudaEventCreateWithFlags(cuda_event, cudaEventDisableTiming); EGLAttribKHR eglattrib[] = { EGL_CUDA_EVENT_HANDLE_NV, (EGLAttrib) cuda_event, EGL_NONE}; cudaStream_t* stream; cudaStreamCreateWithFlags(&stream,cudaStreamDefault); EGLSyncKHR eglsync1, eglsync2; cudaEvent_t egl_event; // Create the EGL_Image EGLint eglImgAttrs[] = { EGL_IMAGE_PRESERVED_KHR, EGL_FALSE, EGL_NONE, EGL_NONE }; EGLImageKHR eglImage = eglCreateImageKHR(eglDisplayHandle, eglCtx, EGL_GL_TEXTURE_2D_KHR, (EGLClientBuffer)(intptr_t)tex, eglImgAttrs); glTexSubImage2D(GL_TEXTURE_2D, 0, 0, 0, WIDTH, HEIGHT, GL_RGBA, GL_UNSIGNED_BYTE, pSurf); //Creates an EGLSync object from GL Sync object to track //finishing of copy. eglsync1 = eglCreateSyncKHR(eglDisplayHandle, EGL_SYNC_FENCE_KHR, NULL); //Create CUDA event object from EGLSync obejct cuEventCreateFromEGLSync(&egl_event, eglsync1, cudaEventDefault); //Waiting on GPU to finish GL copy cuStreamWaitEvent(stream, egl_event, 0); // Register buffer with CUDA cudaGraphicsEGLRegisterImage(&pResource, eglImage, cudaGraphicsRegisterFlagsNone); //Get CUDA array from graphics resource object cudaGraphicsSubResourceGetMappedArray( &pArray, pResource, 0, 0); . . //Create a CUDA surface object from pArray struct cudaResourceDesc resDesc; memset(&resDesc, 0, sizeof(resDesc)); resDesc.resType = cudaResourceTypeArray; resDesc.res.array.array = pArray; cudaSurfaceObject_t inputSurfObj = 0; cudaCreateSurfaceObject(&inputSurfObj, &resDesc); dim3 blockSize(32,32); dim3 gridSize(width/blockSize.x,height/blockSize.y); // Modifies the CUDA array using CUDA surface object changeTexture<<<gridSize, blockSize>>>(inputSurfObj, width, height); cuEventRecord(cuda_event, stream); //Create EGLsync object from CUDA event cuda_event eglsync2 = eglCreateSync64KHR(dpy, EGL_SYNC_CUDA_EVENT_NV, eglattrib); //waits till kernel to finish eglWaitSyncKHR(eglDisplayHandle, eglsync2, 0); . //Copy modified pArray values to hostSurf . unsigned char* temp = (unsigned char*)(malloc(bufferSize * sizeof(unsigned char))); // Get the modified texture values GL_SAFE_CALL(glGetTexImage(GL_TEXTURE_2D, 0, GL_RGBA, GL_UNSIGNED_BYTE,(void*)temp)); . . // This function check if the OpenGL texture got modified values checkbuf(temp,hostSurf); // Clean up CUDA cudaGraphicsUnregisterResource(pResource); cudaDestroySurfaceObject(inputSurfObj); eglDestroySyncKHR(eglDisplayHandle, eglsync1); eglDestroySyncKHR(eglDisplayHandle, eglsync2); cudaEventDestroy(egl_event); cudaEventDestroy(cuda_event); . . }
Notices
Notice
ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, "MATERIALS") ARE BEING PROVIDED "AS IS." NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE.
Information furnished is believed to be accurate and reliable. However, NVIDIA Corporation assumes no responsibility for the consequences of use of such information or for any infringement of patents or other rights of third parties that may result from its use. No license is granted by implication of otherwise under any patent rights of NVIDIA Corporation. Specifications mentioned in this publication are subject to change without notice. This publication supersedes and replaces all other information previously supplied. NVIDIA Corporation products are not authorized as critical components in life support devices or systems without express written approval of NVIDIA Corporation.