NVDEC Video Decoder API Programming Guide
Overview
NVIDIA GPUs - beginning with the NVIDIA® Fermi™ generation - contain a video decoder engine (referred to as NVDEC in this document) which provides fully-accelerated hardware video decoding capability. NVDEC can be used for decoding bitstreams of various formats: AV1, H.264, HEVC (H.265), VP8, VP9, MPEG-1, MPEG-2, MPEG-4 and VC-1. NVDEC runs completely independent of compute/graphics engine.
NVIDIA provides software API and libraries for programming NVDEC. The software API, hereafter referred to as NVDECODE API lets developers access the video decoding features of NVDEC and interoperate NVDEC with other engines on the GPU.
NVDEC decodes the compressed video streams and copies the resulting YUV frames to video memory. With frames in video memory, video post processing can be done using CUDA. The NVDECODE API also provides CUDA-optimized implementation of commonly used post-processing operations such as scaling, cropping, aspect ratio conversion, de-interlacing and color space conversion to many popular output video formats. The client can choose to use the CUDA-optimized implementations provided by the NVDECODE API for these post-processing steps or choose to implement their own post-processing on the decoded output frames.
Decoded video frames can be presented to the display with graphics interoperability for video playback, passed directly to a dedicated hardware encoder (NVENC) for high-performance video transcoding, used for GPU accelerated inferencing or consumed further by CUDA or CPU-based processing.
Supported Codecs
The codecs supported by NVDECODE API are:
- MPEG-1,
- MPEG-2,
- MPEG4,
- VC-1,
- H.264 (AVCHD) (8 bit),
- H.265 (HEVC) (8bit, 10 bit and 12 bit),
- VP8,
- VP9(8bit, 10 bit and 12 bit),
- AV1 Main profile,
- Hybrid (CUDA + CPU) JPEG
Refer to Chapter 2 for complete details about the video capabilities for various GPUs.
Table 1 shows the codec support and capabilities of the hardware video decoder for each GPU architecture.
[1] Supported only on select GP10x GPUs, all Turing GPUs and GA100
[2] VP9 10-bit and 12-bit decoding is supported on select GP10x GPUs, all Turing GPUs and GA100
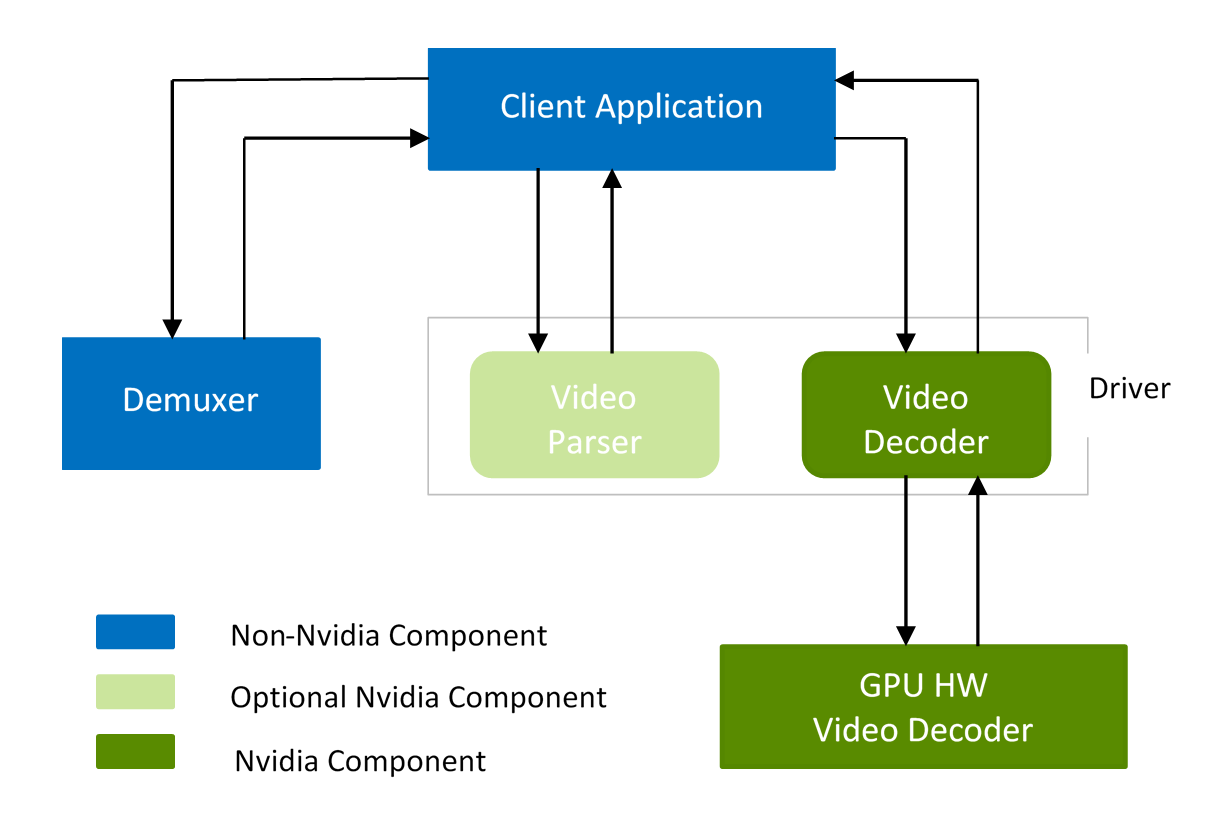
Decoder pipeline consists of three major components - Demuxer, Video Parser, and Video Decoder. The components are not dependent on each other and hence can be used independently. NVDECODE API provide API’s for NVIDIA video parser and NVIDIA video decoder. Of these, NVIDIA video parser is purely a software component and user can plug-in any parser in place of NVIDIA video parser, if required (e.g. FFmpeg parser).
Figure 1. Video decoder pipeline using NVDECODE API
At a high level the following steps should be followed for decoding any video content using NVDECODEAPI:
- Create a CUDA context.
- Query the decode capabilities of the hardware decoder.
- Create the decoder instance(s).
- De-Mux the content (like .mp4). This can be done using third party software like FFMPEG.
- Parse the video bitstream using parser provided by NVDECODE API or third-party parser such as FFmpeg.
- Kick off the Decoding using NVDECODE API.
- Obtain the decoded YUV for further processing.
- Query the status of the decoded frame.
- Depending on the decoding status, use the decoded output for further processing like rendering, inferencing, postprocessing etc.
- If the application needs to display the output,
- Convert decoded YUV surface to RGBA.
- Map RGBA surface to DirectX or OpenGL texture.
- Draw texture to screen.
- Destroy the decoder instance(s) after the completion of decoding process.
- Destroy the CUDA context.
The above steps are explained in the rest of the document and demonstrated in the sample application(s) included in the Video Codec SDK package.
All NVDECODE APIs are exposed in two header-files: cuviddec.h and nvcuvid.h. These headers can be found under ..\Samples\NvCodec\NvDecoder folder in the Video Codec SDK package. The samples in NVIDIA Video Codec SDK statically load the library (which ships as a part of the SDK package for windows) functions and include cuviddec.h and nvcuvid.h in the source files. The Windows DLL nvcuvid.dll is included in the NVIDIA display driver for Windows. The Linux library libnvcuvid.so is included with NVIDIA display driver for Linux.
The following sections in this chapter explain the flow that should be followed to accelerate decoding using NVDECODE API.
Video Parser
Creating a parser
Parser object can be created by calling cuvidCreateVideoParser() after filling the structure CUVIDPARSERPARAMS. The structure should be filled up with following information about the stream to be decoded:
CodecType:must be fromenum cudaVideoCodec, indicating codec type of content like H.264, HEVC, VP9 etc.ulMaxNumDecodeSurfaces:This is number of surfaces in parser’s DPB (decode picture buffer). This value may not be known at the parser initialization time and can be set to a dummy number like 1 to create parser object. Application must register a callbackpfnSequenceCallbackwith the driver, which is called by the parser when the parser encounters the first sequence header or any changes in the sequence. This callback reports the minimum number of surfaces needed by parser’s DPB for correct decoding inCUVIDEOFORMAT::min_num_decode_surfaces. The sequence callback may return this value to the parser if wants to updateCUVIDPARSERPARAMS::ulMaxNumDecodeSurfaces. The parser then overwritesCUVIDPARSERPARAMS::ulMaxNumDecodeSurfaceswith the value returned by the sequence callback, if return value of the sequence callback is greater than 1 (see description aboutpfnSequenceCallbackbelow). Therefore, for optimum memory allocation, decoder object creation should be deferred untilCUVIDPARSERPARAMS::ulMaxNumDecodeSurfacesis known, so that the decoder object can be created with required number of buffers, such thatCUVIDDECODECREATEINFO::ulNumDecodeSurfaces=CUVIDPARSERPARAMS::ulMaxNumDecodeSurfaces.ulMaxDisplayDelay:Max display callback delay. 0 = no delaypfnSequenceCallback:Application must register a function to handle any sequence change. Parser triggers this callback for initial sequence header or when it encounters a video format change. Return value from sequence callback is interpreted by the driver as follows:- 0: fail
- 1: succeeded, but driver should not override
CUVIDPARSERPARAMS::ulMaxNumDecodeSurfaces - >1: succeeded, and driver should override
CUVIDPARSERPARAMS::ulMaxNumDecodeSurfaceswith this return value
pfnDecodePicture:Parser triggers this callback when bitstream data for one frame is ready. In case of field pictures, there may be two decode calls per one display call since two fields make up one frame. Return value from this callback is interpreted as:- 0: fail
- ≥1: succeeded
pfnDisplayPicture: Parser triggers this callback when a frame in display order is ready. Return value from this callback is interpreted as:- 0: fail
- ≥1: succeeded
Parsing the packets
Packets extracted from demultiplexer are fed into parser using cuvidParseVideoData(). Parser triggers callbacks registered while creating parser object synchronously from within cuvidParseVideoData(), whenever there is sequence change or a picture is ready to be decoded and/or displayed. If the callback returns failure, it will be propagated by cuvidParseVideoData() to the application.
The decoded result gets associated with a picture-index value in theCUVIDPICPARAMSstructure, which is also provided by the parser. This picture index is later used to map the decoded frames to CUDA memory.
Destroying parser
The user needs to call cuvidDestroyVideoParser() to destroy the parser object and free up all the allocated resources.
Video Decoder
Querying decode capabilities
The API cuvidGetDecoderCaps() lets users query the capabilities of underlying hardware video decoder.
As illustrated in Table 1, different GPUs have hardware decoders with different capabilities. Therefore, to ensure your application works on all generations of GPU hardware, it is highly recommended that the application queries the hardware capabilities and makes appropriate decision based on presence/absence of the desired capability/functionality.
The API cuvidGetDecoderCaps() lets users query the capabilities of underlying hardware video decoder. Calling thread should have a valid CUDA context associated.
The client needs to fill in the following fields of CUVIDDECODECAPS before calling cuvidGetDecoderCaps().
eCodecType: Codec type (AV1, H.264, HEVC, VP9, JPEG etc.)eChromaFormat: 4:2:0, 4:4:4, etc.nBitDepthMinus8: 0 for 8-bit, 2 for 10-bit, 4 for 12-bit
When cuvidGetDecoderCaps() is called , the underlying driver fills up the remaining fields of CUVIDDECODECAPS, indicating the support for the queried capabilities, supported output formats and the maximum and minimum resolutions the hardware supports.
The following pseudo-code illustrates how to query the capabilities of NVDEC.
CUVIDDECODECAPS decodeCaps = {};
// set IN params for decodeCaps
decodeCaps.eCodecType = cudaVideoCodec_HEVC;//HEVC
decodeCaps.eChromaFormat = cudaVideoChromaFormat_420;//YUV 4:2:0
decodeCaps.nBitDepthMinus8 = 2;// 10 bit
result = cuvidGetDecoderCaps(&decodeCaps);
Returned parameters from API can be interpreted as below to validate if content can be decoded on underlying hardware:
// Check if content is supported
if (!decodecaps.bIsSupported){
NVDEC_THROW_ERROR(Codec not supported on this GPU", CUDA_ERROR_NOT_SUPPORTED);
}
// validate the content resolution supported on underlying hardware
if ((coded_width > decodecaps.nMaxWidth) ||
(coded_height > decodecaps.nMaxHeight)){
NVDEC_THROW_ERROR(Resolution not supported on this GPU", CUDA_ERROR_NOT_SUPPORTED);
}
// Max supported macroblock count CodedWidth*CodedHeight/256 must be <= nMaxMBCount
if ((coded_width>>4)*(coded_height>>4) > decodecaps.nMaxMBCount){
NVDEC_THROW_ERROR(MBCount not supported on this GPU",
CUDA_ERROR_NOT_SUPPORTED);
}
In most situations, bit-depth and chroma subsampling to be used at the decoder output is same as that at the decoder input (i.e. in the content). In certain cases, however, it may be necessary to have the decoder produce output with bit-depth and chroma subsampling different from that used in the input bitstream. In general, it’s always a good idea to first check if the desired output bit-depth and chroma subsampling format is supported before creating the decoder. This can be done in the following way:
// Check supported output format
if (decodecaps.nOutputFormatMask & (1<<cudaVideoSurfaceFormat_NV12)){
// Decoder supports output surface format NV12
}
if (decodecaps.nOutputFormatMask & (1<<cudaVideoSurfaceFormat_P010){
// Decoder supports output surface format P010
}
……
The API cuvidGetDecoderCaps() also returns histogram related capabilities of underlying GPU. Histogram data is collected by NVDEC during the decoding process resulting in zero performance penalty. NVDEC computes the histogram data for only the luma component of decoded output, not on post-processed frame(i.e. when scaling, cropping, etc. applied). In case of AV1 when film gain is enabled, histogram data is collected on the decoded frame prior to the application of the flim grain.
// Check if histogram is supported
if (decodecaps.bIsHistogramSupported){
nCounterBitDepth = decodecaps.nCounterBitDepth; // histogram counter bit depth
nMaxHistogramBins = decodecaps.nMaxHistogramBins; // Max number of histogram bins
}
……
Histogram data is calculated as : Histogram_Bin[pixel_value >> (pixel_bitDepth - log2(nMaxHistogramBins))]++;
Creating a Decoder
Before creating the decoder instance, user needs to have a valid CUDA context which will be used in the entire decoding process.
The decoder instance can be created by calling cuvidCreateDecoder() after filling the structure CUVIDDECODECREATEINFO. The structure CUVIDDECODECREATEINFO should be filled up with the following information about the stream to be decoded:
CodecType:must be fromenum cudaVideoCodec. It represents codec type of content likeH.264, HEVC, VP9 etc.ulWidth, ulHeight: coded width and coded height in pixels.ulMaxWidth, ulMaxHeight: max width and max height that decoder support in case of resolution change. When there is resolution change (new resolution <= ulMaxWidth, ulMaxHeight) in video stream, app can reconfigure decoder using cuvidReconfigureDecoder() API instead of destroy and recreate the decoder. If ulMaxWidth or ulMaxHeight is set to 0, ulMaxWidth and ulMaxHeight are set to ulWidth and ulHeight respectively.ChromaFormat:must be fromenum cudaVideoChromaFormat.It represents chroma format of content like 4:2:0, 4:4:4, etc.bitDepthMinus8: bit-depth minus 8 of video stream to be decoded like 0 for 8-bit, 2 for 10-bit, 4 for 12-bit.ulNumDecodeSurfaces:Referred to as decode surfaces elsewhere in this document, this is the number of surfaces that the driver will internally allocate for storing the decoded frames. Using a higher number ensures better pipelining but increases GPU memory consumption. For correct operation, minimum value is defined inCUVIDEOFORMAT::min_num_decode_surfacesand can be obtained from first sequence callback from Nvidia parser. The NVDEC engine writes decoded data to one of these surfaces. These surfaces are not accessible by the user of NVDECODE API, but the mapping stage, which includes decoder output format conversion, scaling, cropping etc.) use these surfaces as input surfaces.ulNumOutputSurfaces:This is the maximum number of output surfaces that the client will simultaneously map to decode surfaces for further processing usingcuvidMapVideoFrame().These surfaces have postprocessed decoded output to be used by client. The driver internally allocates the corresponding number of surfaces (referred as output surfaces in this document). Client will have access to output surfaces. Refer to section Preparing the decoded frame for further processing to understand the definition of map.OutputFormat: Output surface format defined asenum cudaVideoSurfaceFormat.This output format must be one of supported format obtained indecodecaps.nOutputFormatMaskincuvidGetDecoderCaps().If an unsupported output format is passed, API will fail with errorCUDA_ERROR_NOT_SUPPORTED.ulTargetWidth, ulTargetHeight:This is resolution of output surfaces. For use-case which involve no scaling, these should be set toulWidth, ulHeight, respectively.DeinterlaceMode: This should be set tocudaVideoDeinterlaceMode_WeaveorcudaVideoDeinterlaceMode_Bobfor progressive content andcudaVideoDeinterlaceMode_Adaptivefor interlaced content.cudaVideoDeinterlaceMode_Adaptiveyields better quality but increases memory consumption.ulCreationFlags: It is defined asenum cudaVideoCreateFlags. It is optional to explicitly define this flag. Driver will pick appropriate mode if not defined.ulIntraDecodeOnly:Set this flag to 1 to instruct the driver that the content being decoded contains only I/IDR frames. This helps the driver optimize memory consumption. Do not set this flag if content has non-intra frames.enableHistogram:Set this flag to 1 to enable histogram data collection.
The cuvidCreateDecoder()call fills CUvideodecoderwith the decoder handle which should be retained till the decode session is active. The handle needs to be passed along with other NVDECODE API calls.
The user can also specify the following parameters in the CUVIDDECODECREATEINFOto control the final output:
- Scaling dimension
- Cropping dimension
- Dimension if the user wants to change the aspect ratio
The following code demonstrates the setup of decoder in case of scaling, cropping, or aspect ratio conversion.
// Scaling. Source size is 1280x960. Scale to 1920x1080.
CUresult rResult;
unsigned int uScaleW, uScaleH;
uScaleW = 1920;
uScaleH = 1080;
...
CUVIDDECODECREATEINFO stDecodeCreateInfo;
memset(&stDecodeCreateInfo, 0, sizeof(CUVIDDECODECREATEINFO));
... // Setup the remaining structure members
stDecodeCreateInfo.ulTargetWidth = uScaleWidth;
stDecodeCreateInfo.ulTargetHeight = uScaleHeight;
rResult = cuvidCreateDecoder(&hDecoder, &stDecodeCreateInfo);
...
// Cropping. Source size is 1280x960
CUresult rResult;
unsigned int uCropL, uCropR, uCropT, uCropB;
uCropL = 30;
uCropR = 700;
uCropT = 20;
uCropB = 500;
...
CUVIDDECODECREATEINFO stDecodeCreateInfo;
memset(&stDecodeCreateInfo, 0, sizeof(CUVIDDECODECREATEINFO));
// Setup the remaining structure members
...
stDecodeCreateInfo.display_area.left = uCropL;
stDecodeCreateInfo.display_area.right = uCropR;
stDecodeCreateInfo.display_area.top = uCropT;
stDecodeCreateInfo.display_are.bottom = uCropB;
rResult = cuvidCreateDecoder(&hDecoder, &stDecodeCreateInfo);
...
// Aspect Ratio Conversion. Source size is 1280x960(4:3). Convert to
// 16:9
CUresult rResult;
unsigned int uCropL, uCropR, uCropT, uCropB;
uDispAR_L = 0;
uDispAR_R = 1280;
uDispAR_T = 70;
uDispAR_B = 790;
...
CUVIDDECODECREATEINFO stDecodeCreateInfo;
memset(&stDecodeCreateInfo, 0, sizeof(CUVIDDECODECREATEINFO));
... // setup structure members
stDecodeCreateInfo.target_rect.left = uDispAR_L;
stDecodeCreateInfo.target_rect.right = uDispAR_R;
stDecodeCreateInfo.target_rect.top = uDispAR_T;
stDecodeCreateInfo.target_rect.bottom = uDispAR_B;
reResult = cuvidCreateDecoder(&hDecoder, &stDecodeCreateInfo);
...
Decoding the frame/field
After de-muxing and parsing, the client can submit the bitstream which contains a frame or field of data to hardware for decoding. To accomplish this the following steps, need to be followed:
- Fill up the
CUVIDPICPARAMSstructure.- The client needs to fill up the structure with parameters derived during the parsing process.
CUVIDPICPARAMScontains a structure specific to every supported codec which should also be filled up.
- The client needs to fill up the structure with parameters derived during the parsing process.
- Call
cuvidDecodePicture()and pass the decoder handle and the pointer to CUVIDPICPARAMS.cuvidDecodePicture()kicks off the decoding on NVDEC.
Preparing the decoded frame for further processing
The user needs to call cuvidMapVideoFrame() to get the CUDA device pointer and pitch of the output surface that holds the decoded and post-processed frame.
Please note that cuvidDecodePicture() instructs the NVDEC hardware engine to kick off the decoding of the frame/field. However, successful completion of cuvidMapVideoFrame() indicates that the decoding process is completed and that the decoded YUV frame is converted from the format generated by NVDEC to the YUV format specified in CUVIDDECODECREATEINFO::OutputFormat.
cuvidMapVideoFrame() API takes decode surface index (nPicIdx) as input and maps it to one of available output surfaces, post-processes the decoded frame and copy to output surface and returns CUDA device pointer and associated pitch of the output surfaces.
The above operation performed by cuvidMapVideoFrame() is referred to as mapping in this document.
After the user is done with the processing on the frame, cuvidUnmapVideoFrame() must be called to make the output surface available for storing other decoded and post-processed frames.
If the user continuously fails to call the corresponding cuvidUnmapVideoFrame() after cuvidMapVideoFrame(), then cuvidMapVideoFrame() will eventually fail. At most CUVIDDECODECREATEINFO::ulNumOutputSurfaces frames can be mapped at a time.
cuvidMapVideoFrame() is a blocking call as it waits for decoding to complete. If cuvidMapVideoFrame() is called on same CPU thread as cuvidDecodePicture(), it will block cuvidDecodePicture() as well. In this case, the application will not be able to submit decode packets to NVDEC until mapping is complete. It can be avoided by performing the mapping operation on a CPU thread (referred as mapping thread) different from the one calling cuvidDecodePicture() (referred as decoding thread).
When using NVIDIA parser from NVDECODE API, the application can implement a producer-consumer queue between decoding thread (as producer) and mapping thread (as consumer). The queue can contain picture indexes (or other unique identifiers) for frames being decoded. Parser can run on decoding thread. Decoding thread can add the picture index to the queue in display callback and return immediately from callback to continue decoding subsequent frames as they become available. On the other side, mapping thread will monitor the queue. If it sees the queue has non-zero length, it will dequeue the entry and call cuvidMapVideoFrame(…) with nPicIdx as the picture index. Decoding thread must ensure to not reuse the corresponding decode picture buffer for storing the decoded output until its entry is consumed and freed by mapping thread.
The following code demonstrates how to use cuvidMapVideoFrame() and cuvidUnmapVideoFrame().
// MapFrame: Call cuvidMapVideoFrame and get the devptr and associated
// pitch. Copy this surface (in device memory) to host memory using
// CUDA device to host memcpy.
bool MapFrame()
{
CUVIDPARSEDISPINFO stDispInfo;
CUVIDPROCPARAMS stProcParams;
CUresult rResult;
unsigned long long cuDevPtr = 0;
int nPitch, nPicIdx, frameSize;
unsigned char* pHostPtr = nullptr;
memset(&stDispInfo, 0, sizeof(CUVIDPARSEDISPINFO));
memset(&stProcParams, 0, sizeof(CUVIDPROCPARAMS));
/*************************************************
* setup stProcParams
**************************************************/
// retrieve the frames from the Frame Display Queue. This Queue is
// is populated in HandlePictureDisplay.
if (g_pFrameQueue->dequeue(&stDispInfo))
{
nPicIdx = stDispInfo.picture_index;
rResult = cuvidMapVideoFrame(&hDecoder, nPicIdx, &cuDevPtr,
&nPitch, &stProcParams);
frameSize = (ChromaFormat == cudaVideoChromaFormat_444) ? nPitch * (3*nheight) :
nPitch * (nheight + (nheight + 1) / 2);
// use CUDA based Device to Host memcpy
rResult = cuMemAllocHost((void** )&pHostPtr, frameSize);
if (pHostPtr)
{
rResult = cuMemcpyDtoH(pHostPtr, cuDevPtr, frameSize);
}
rResult = cuvidUnmapVideoFrame(&hDecoder, cuDevPtr);
}
... // Dump YUV to a file
if (pHostPtr)
{
cuMemFreeHost(pHostPtr);
}
...
}
In multi-instance decoding use-case, NVDEC could be bottleneck so there wouldn’t be significant benefit of calling cuvidMapVideoFrame() and cuvidDecodePicture() on different CPU threads. cuvidDecodePicture() will stall if wait queue on NVDEC inside driver is full. Sample applications in Video Codec SDK are using mapping and decode calls on same CPU thread, for simplicity.
Getting histogram data buffer
Histogram data is collected by NVDEC during the decoding process resulting in zero performance penalty. NVDEC computes the histogram data for only the luma component of decoded output, not on post-processed frame(i.e. when scaling, cropping, etc. applied). In case of AV1 when film gain is enabled, histogram data is collected on the decoded frame prior to the application of the flim grain.
cuvidMapVideoFrame() API returns the CUDA device pointer of histogram data buffer along with output surface if CUVIDDECODECREATEINFO::enableHistogram flag is set while creating decoder (using API cuvidCreateDecoder()). CUDA device pointer of histogram buffer can be obtained from CUVIDPROCPARAMS::histogram_dptr.
Histogram buffer is mapped to output buffer in driver so cuvidUnmapVideoFrame() does unmap of histogram buffer also along with output surface.
The following code demonstrates how to use cuvidMapVideoFrame() and cuvidUnmapVideoFrame() for accessing histogram buffer.
// MapFrame: Call cuvidMapVideoFrame and get the output frame and associated
// histogram buffer CUDA device pointer
CUVIDPROCPARAMS stProcParams;
CUresult rResult;
unsigned long long cuOutputFramePtr = 0, cuHistogramPtr = 0;
int nPitch;
int histogram_size = (decodecaps.nCounterBitDepth / 8) *
decodecaps.nMaxHistogramBins;
unsigned char *pHistogramPtr = nullptr;
memset(&stProcParams, 0, sizeof(CUVIDPROCPARAMS));
/*************************************************
* setup stProcParams
**************************************************/
stProcParams.histogram_dptr = &cuHistogramPtr;
rResult = cuvidMapVideoFrame(&hDecoder, nPicIdx, &cuOutputFramePtr,
&nPitch, &stProcParams);
// allocate histogram buffer for cuMemcpy
rResult = cuMemAllocHost((void** )&pHistogramPtr, histogram_size);
if (pHistogramPtr)
{
rResult = cuMemcpyDtoH(pHistogramPtr, cuHistogramPtr, histogram_size);
}
// unmap output frame
rResult = cuvidUnmapVideoFrame(&hDecoder, cuOutputFramePtr);
...
}
Querying the decoding status
After the decoding is kicked off, cuvidGetDecodeStatus() can be called at any time to query the status of decoding of that frame. The underlying driver fills the status of decoding in CUVIDGETDECODESTATUS::*pDecodeStatus.
The NVDECODEAPI currently reports the following statuses:
- Decoding is in progress.
- Decoding of the frame completed successfully.
- The bitstream for the frame was corrupted and concealed by NVDEC.
- The bitstream for the frame was corrupted, however could not be concealed by NVDEC.
The API is expected to help in the scenarios where the client needs to take a further decision based on the decoding status of the frame, for e.g. whether to carry out inferencing on the frame or not.
Please note that the NVDEC can detect a limited number of errors depending on the codec. This API is supported for HEVC, H264 and JPEG on Maxwell and above generation GPUs.
Reconfiguring the decoder
Using cuvidReconfigureDecoder() the user can reconfigure the decoder if there is a change in the resolution and/or post processing parameters of the bitstream without having to destroy the ongoing decoder instance, and create a new one thereby saving time (and latency) in the process.
In the earlier SDKs the user had to destroy the existing decoder instance and create a new decoder instance for handling any change in decoder resolution or post processing parameters (like scaling ratio, cropping dimensions etc.).
The API can be used in scenarios where the bitstream undergoes changes in resolution, for e.g. when the encoder (on server side) changes image resolution frequently to adhere to Quality of Service(QoS) constraints.
The following steps need to be followed for using the cuvidReconfigureDecoder().
- The user needs to specify
CUVIDDECODECREATEINFO::ulMaxWidthandCUVIDDECODECREATEINFO::ulMaxHeightwhile callingcuvidCreateDecoder(). The user should choose the values ofCUVIDDECODECREATEINFO::ulMaxWidthandCUVIDDECODECREATEINFO::ulMaxHeightwhich to ensure that the resolution of the bitstream is never exceeded during the entire decoding process. Please note that the values ofCUVIDDECODECREATEINFO::ulMaxWidthandCUVIDDECODECREATEINFO::ulMaxHeightcannot be changed within a session and if user wants to change the values, the decoding session should be destroyed and recreated. - During the process of decoding, when the user needs to change the bitstream or change postprocessing parameters, the user needs to call
cuvidReconfigureDecoder(). This call should be ideally made fromCUVIDPARSERPARAMS::pfnSequenceCallbackwhen the bitstream changes. The parameters the user wants to reconfigure should be filled up in::CUVIDRECONFIGUREDECODERINFO. Please note,CUVIDRECONFIGUREDECODERINFO::ulWidthandCUVIDRECONFIGUREDECODERINFO::ulHeightmust be equal to or smaller thanCUVIDDECODECREATEINFO::ulMaxWidthandCUVIDDECODECREATEINFO::ulMaxHeightrespectively or else thecuvidReconfigureDecoder()would fail.
The API is supported for all codecs supported by NVDECODEAPI.
Destroying the decoder
The user needs to call cuvidDestroyDecoder() to destroy the decoder session and free up all the allocated decoder resources.
Writing an Efficient Decode Application
The NVDEC engine on NVIDIA GPUs is a dedicated hardware block, which decodes the input video bitstream in supported formats. A typical video decode application broadly consists of the following stages:
- De-Muxing
- Video bitstream parsing and decoding
- Preparing the frame for further processing
Of these, de-muxing and parsing are not hardware accelerated and therefore outside the scope of this document. The de-muxing can be performed using third party components such as FFmpeg, which provides support for many multiplexed video formats. The sample applications included in the SDK demonstrate de-muxing using FFmpeg.
Similarly, post-decode or video post-processing (such as scaling, color space conversion, noise reduction, color enhancement etc.) can be effectively performed using user-defined CUDA kernels.
The post-processed frames can then be sent to the display engine for displaying on the screen, if required. Note that this operation is outside the scope of NVDECODE APIs.
An optimized implementation should use independent threads for de-muxing, parsing, bitstream decode and processing etc. as explained below:
- De-muxing: This thread demultiplexes the media file and makes the raw bit-stream available for parser to consume.
- Parsing and decoding: This thread does the parsing of the bitstream and kicks off decoding by calling
cuvidDecodePicture(). - Mapping and making the frame available for further processing: This thread checks if there are any decoded frames available. If yes, then it should call
cuvidMapVideoFrame()to get the CUDA device pointer and pitch of the frame. The frame can then be used for further processing.
The NVDEC driver internally maintains a queue of 4 frames for efficient pipelining of operations. Please note that this pipeline does not imply any decoding delay for decoding. The decoding starts as soon as the first frame is queued, but the application can continue queuing up input frames so long as space is available without stalling. Typically, by the time application has queued 2-3 frames, decoding of the first frame is complete and the pipeline continues. This pipeline ensures that the hardware decoder is utilized to the maximum extent possible.
For performance intensive and low latency video codec applications, ensure the PCIE link width is set to the maximum available value. PCIE link width currently configuredcan be obtained by running command 'nvidia-smi -q'. PCIE link width can be configured in the system's BIOS settings.
In the use cases where there is frequent change of decode resolution and/or post processing parameters, it is recommended to use cuvidReconfigureDecoder() instead of destroying the existing decoder instance and recreating a new one.
The following steps should be followed for optimizing video memory usage:
- Make
CUVIDDECODECREATEINFO::ulNumDecodeSurfaces = CUVIDEOFORMAT:: min_num_decode_surfaces. This will ensure that the underlying driver allocates minimum number of decode surfaces to correctly decode the sequence. In case there is reduction in decoder performance, clients can slightly increaseCUVIDDECODECREATEINFO::ulNumDecodeSurfaces. It is therefore recommended to choose the optimal value ofCUVIDDECODECREATEINFO::ulNumDecodeSurfacesto ensure right balance between decoder throughput and memory consumption. CUVIDDECODECREATEINFO::ulNumOutputSurfacesshould be decided optimally after due experimentation for balancing decoder throughput and memory consumption.CUVIDDECODECREATEINFO::DeinterlaceModeshould be set “cudaVideoDeinterlaceMode::cudaVideoDeinterlaceMode_Weave” or “cudaVideoDeinterlaceMode::cudaVideoDeinterlaceMode_Bob”. For interlaced contents, choosingcudaVideoDeinterlaceMode::cudaVideoDeinterlaceMode_Adaptiveresults to higher quality but increases memory consumption. UsingcudaVideoDeinterlaceMode::cudaVideoDeinterlaceMode_WeaveorcudaVideoDeinterlaceMode::cudaVideoDeinterlaceMode_Bobresults to minimum memory consumption though it may result in lesser video quality. In case “CUVIDDECODECREATEINFO::DeinterlaceMode” is not specified by the client, the underlying display driver sets it to “cudaVideoDeinterlaceMode::cudaVideoDeinterlaceMode_Adaptive” which results to higher memory consumption. Hence it is strongly recommended to choose the right value ofCUVIDDECODECREATEINFO::DeinterlaceModedepending on the requirement.- While decoding multiple streams it is recommended to allocate minimum number of CUDA contexts and share it across sessions. This saves the memory overhead associated with the CUDA context creation.
CUVIDDECODECREATEINFO::ulIntraDecodeOnlyshould be set to 1 if it is known beforehand that the sequence contains Intra frames only. This feature is supported only for HEVC, H.264 and VP9. However, decoding might fail if the flag is enabled in case of supported codecs for regular bit streams having P and/or B frames.
The sample applications included with the Video Codec SDK are written to demonstrate the functionality of various APIs, but they may not be fully optimized. Hence programmers are strongly encouraged to ensure that their application is well-designed, with various stages in the decode-postprocess-display pipeline structured in an efficient manner to achieve desired performance and memory consumption.
Notice
This document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation (“NVIDIA”) makes no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assumes no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.
NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.
Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.
NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgment, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.
NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.
NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.
Trademarks
NVIDIA, the NVIDIA logo, and cuBLAS, CUDA, CUDA Toolkit, cuDNN, DALI, DIGITS, DGX, DGX-1, DGX-2, DGX Station, DLProf, GPU, Jetson, Kepler, Maxwell, NCCL, Nsight Compute, Nsight Systems, NVCaffe, NVIDIA Deep Learning SDK, NVIDIA Developer Program, NVIDIA GPU Cloud, NVLink, NVSHMEM, PerfWorks, Pascal, SDK Manager, Tegra, TensorRT, TensorRT Inference Server, Tesla, TF-TRT, Triton Inference Server, Turing, and Volta are trademarks and/or registered trademarks of NVIDIA Corporation in the United States and other countries. Other company and product names may be trademarks of the respective companies with which they are associated.