Real-Time Alert Workflow#
The Real-Time Alert Workflow monitors live video streams and generates alerts when the VLM detects anomalies or specified events.
Capabilities
Use Cases
Traffic collision detection
Unusual behavior detection
Equipment malfunction identification
Safety hazard detection
Estimated Deployment Time: 15-20 minutes
The following diagram illustrates the real-time alert workflow architecture:
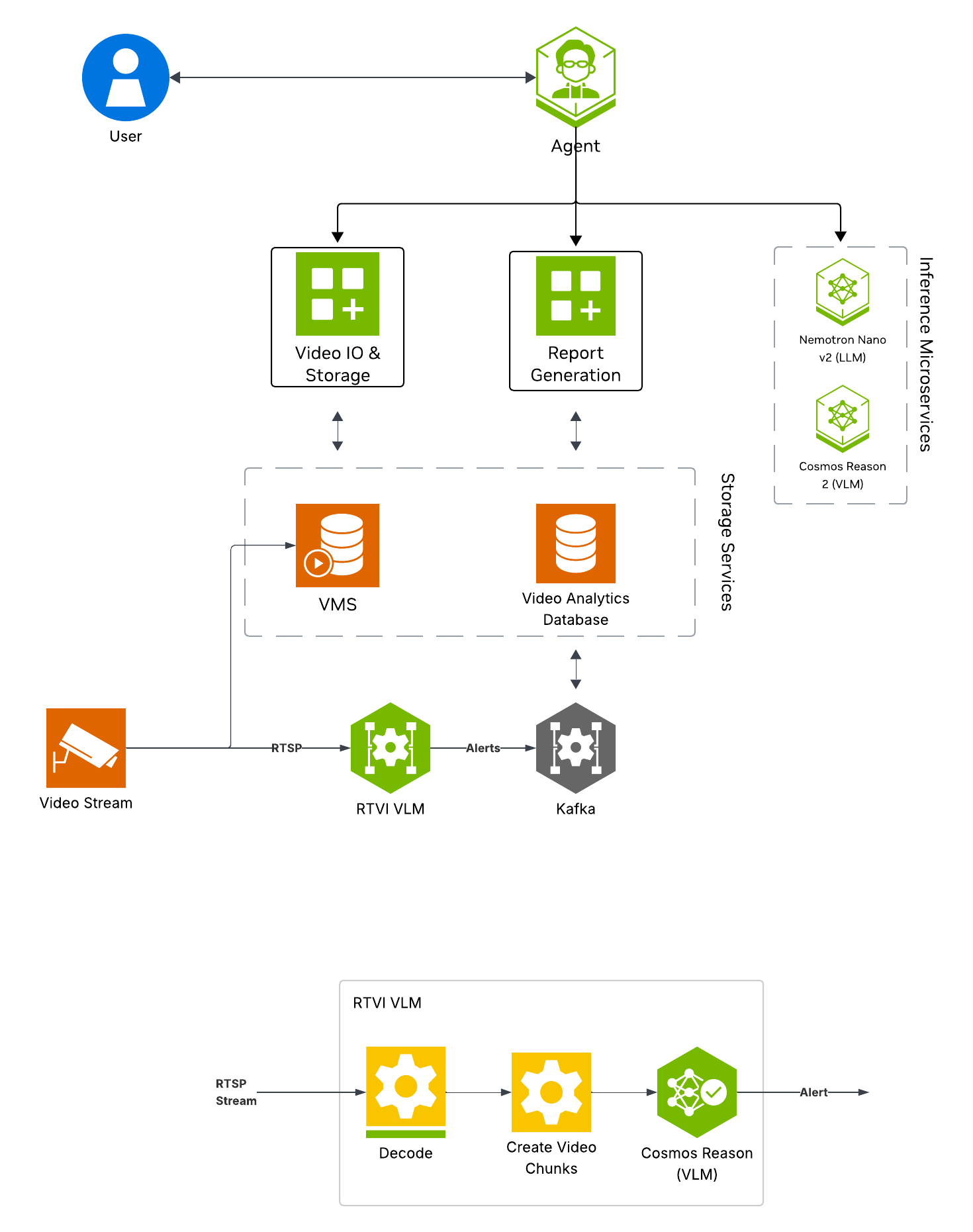
Key Features of the Real-Time Alert Agent:
Continuous frame sampling from video streams
Natural language queries for detected alerts
Frame sampling and VLM-based anomaly detection using the RTVI microservice.
Configurable alert prompts and invocation settings for custom detection scenarios.
What’s being deployed#
VSS Agent: Agent service that orchestrates tool calls and model inference to answer questions and generate outputs
VSS Agent UI: Web UI with chat, video upload, and different views
RTVI VLM: Real-Time VLM microservice for alert verification
Video IO & Storage (VIOS): Video ingestion, recording, and playback services used by the agent for video access and management
NVStreamer: Video streaming service for video playback
Nemotron LLM (NIM): LLM inference service used for reasoning, tool selection, and response generation
Cosmos Reason (NIM): Vision-language model with physical reasoning capabilities
ELK: Elasticsearch, Logstash, and Kibana stack for log storage and analysis
Phoenix: Observability and telemetry service for agent workflow monitoring
Prerequisites#
Before you begin, ensure all of the prerequisites are met. See Prerequisites for more details.
Deploy#
Note
For instructions on downloading sample data and the deployment package, see Download Sample Data and Deployment Package in the Quickstart guide.
Skip to Step 1: Deploy the Agent if you have already downloaded and deployed another agent workflow.
Step 1: Deploy the Agent#
Based on your GPU, run the following command to deploy the agent:
deployments/dev-profile.sh up -p alerts -m 2d_vlm
deployments/dev-profile.sh up -p alerts -m 2d_vlm -H RTX6000PROBW
deployments/dev-profile.sh up -p alerts -m 2d_vlm -H L40S
This deployment uses the following defaults:
Host IP: Primary IP from
ip routeAlert mode: 2d_vlm (required for this workflow)
LLM mode: local_shared
VLM mode: local_shared
LLM model: nvidia-nemotron-nano-9b-v2
VLM model: cosmos-reason2-8b
This command will download the necessary containers from the NGC Docker registry and start the agent. Depending on your network speed, this may take a few minutes.
Note
NGC API Key: The deployment requires an NGC CLI API key. You can either set it as an environment variable (export NGC_CLI_API_KEY='your_ngc_api_key') or pass it as a command-line argument using -k 'your_ngc_api_key'.
Note
For advanced deployment options such as hardware profiles, NIM configurations, and model selection, see Advanced Deployment Options.
Once complete, check that all the containers are running and healthy:
docker ps
Once all the containers are running, you can access the agent UI at http://<HOST_IP>:3000/.
Step 2: Add a video stream#
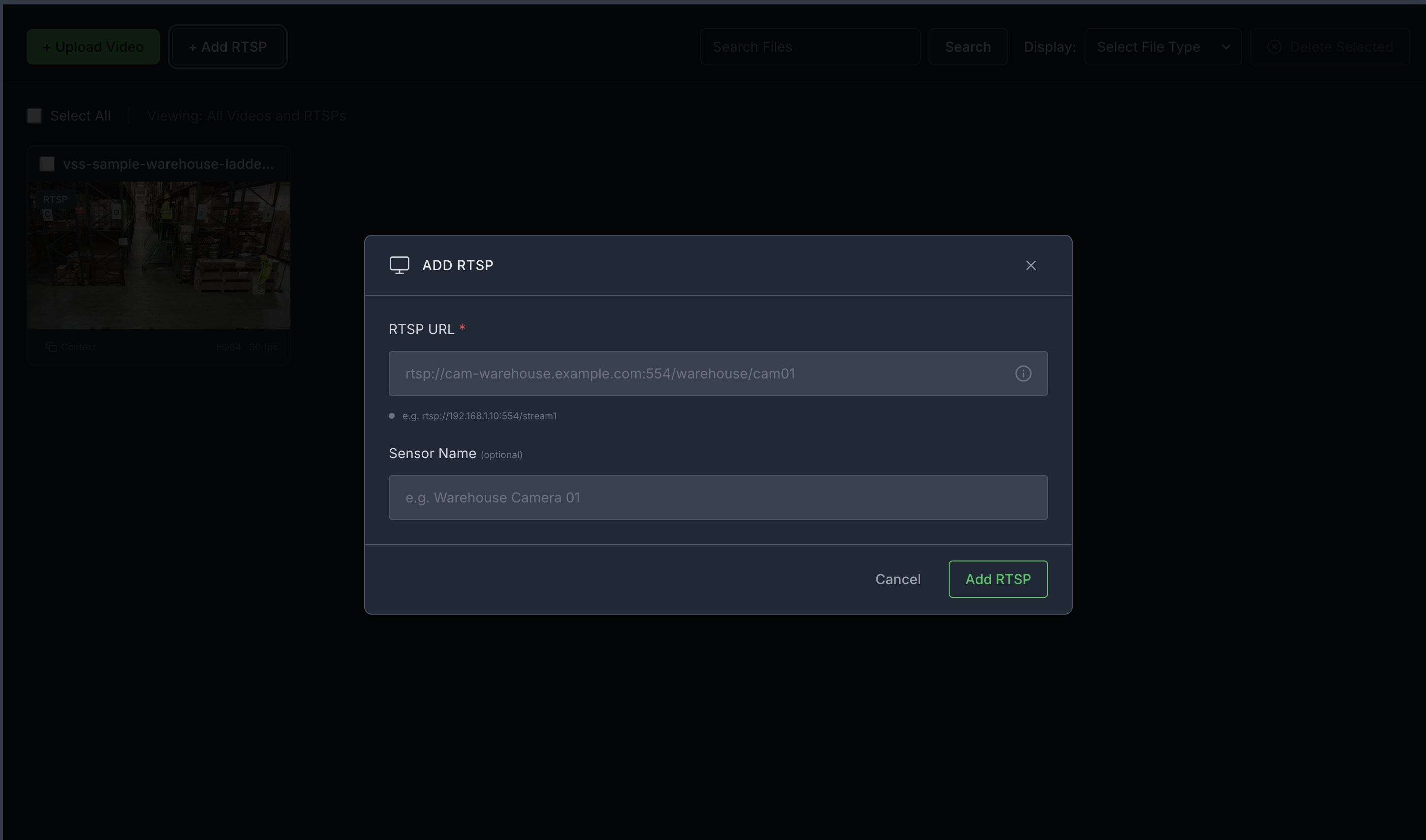
Add an RTSP stream by clicking the “+ Add RTSP” button under the “Video Management tab” on the agent UI. If you do not have an RTSP stream, you can use NVStreamer at http://<HOST_IP>:31000 to upload a video file and create an RTSP stream.
For this profile, use the warehouse_sample.mp4 stream. When prompting, ensure the sensor name matches exactly what you configured for the stream (e.g., warehouse_sample).
Note
By default, this profile only supports up to one stream being processed at a time.
Step 3: Start a real-time alert#
Launch the Agent UI at http://<HOST_IP>:3000/.
Use the Chat Tab to interact with the system:
- Start an RTVI real-time alert for a stream by specifying the alert type.
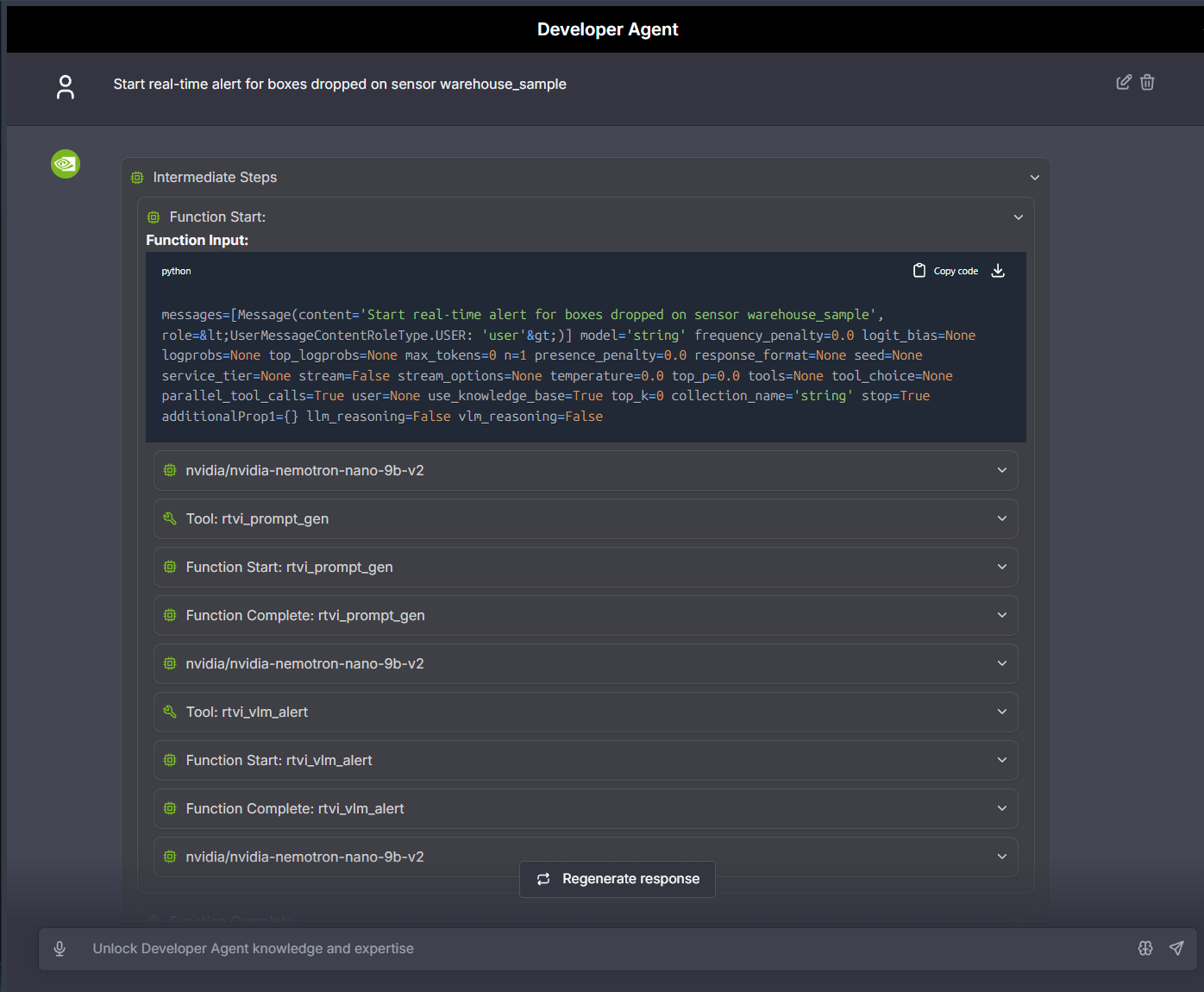
Sample prompt: Start real-time alert for boxes dropped on sensor warehouse_sample
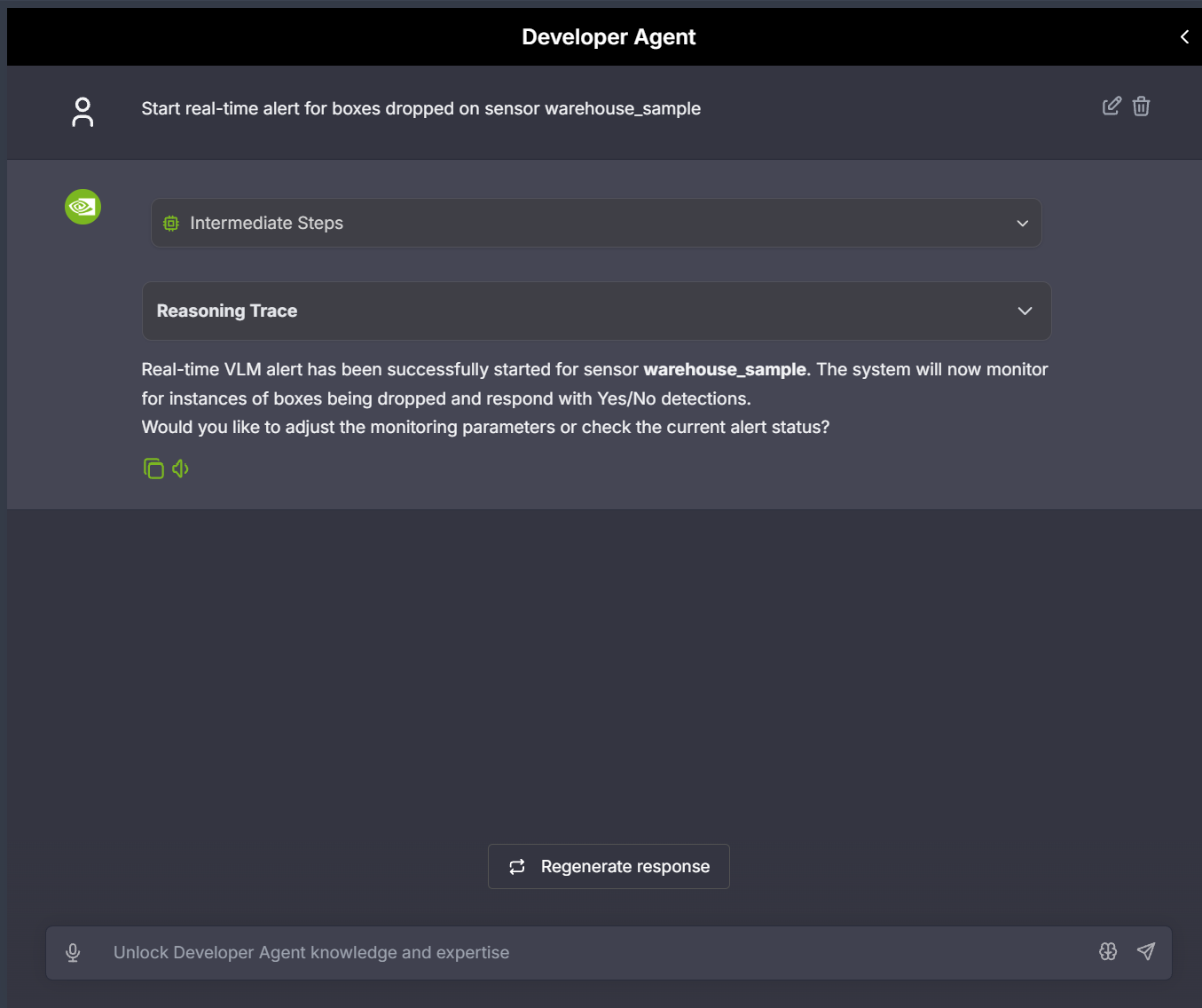
To view the reasoning trace for alert detection, click on the “Trace” icon in the alert details. This shows the VLM’s analysis process and decision-making steps.
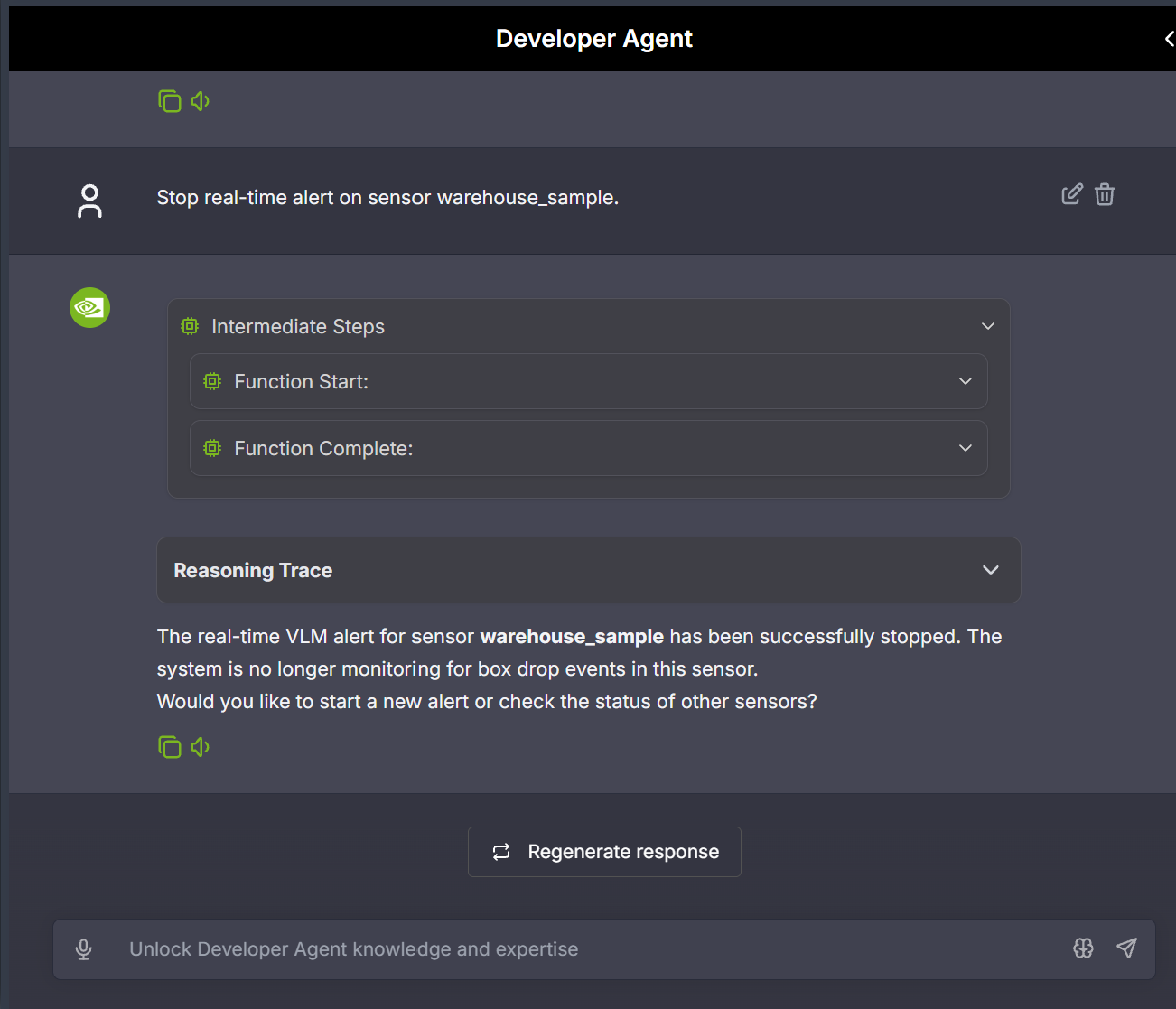
- Stop an RTVI real-time alert for a stream when monitoring is no longer needed.
Sample prompt: Stop real-time alert on sensor warehouse_sample
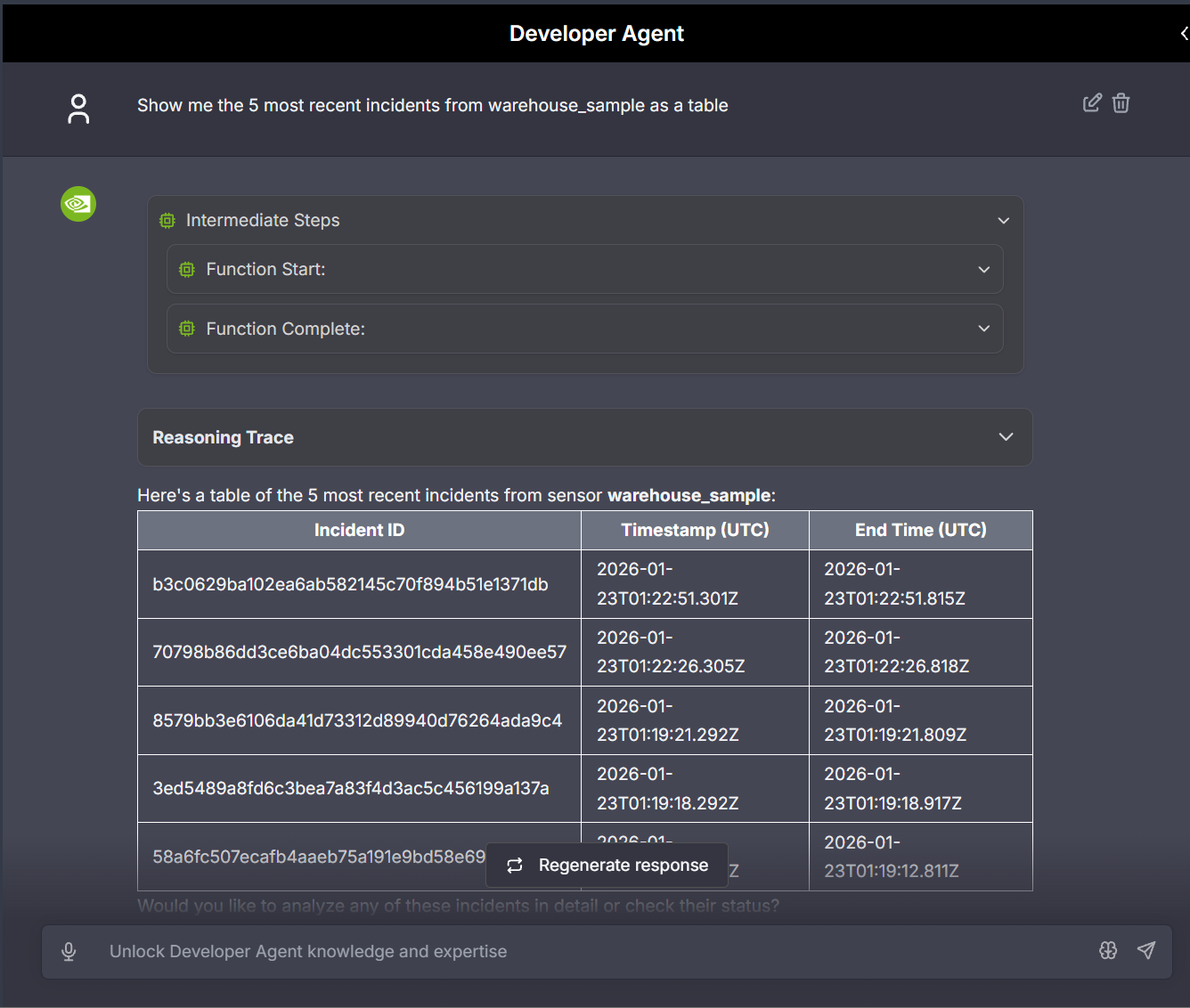
- List alert incidents for a stream to review detected anomalies.
Sample prompt: Show me the 5 most recent incidents from warehouse_sample as a table
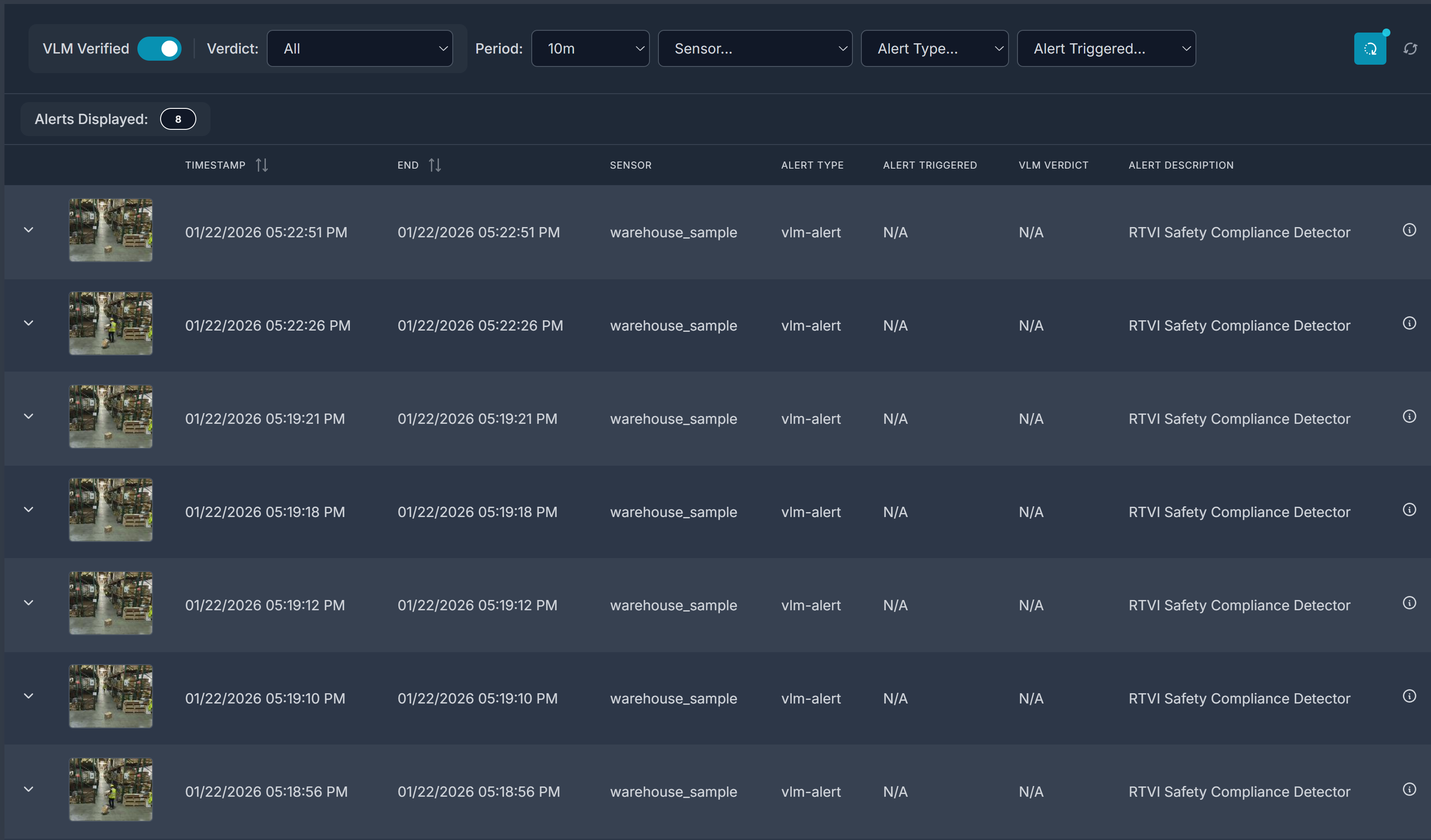
Click on the “Alerts” tab on the left hand side and enable “VLM Verified” to view the verified alerts for all active sensors.
Step 4: Teardown the Agent#
To teardown the agent, run the following command:
deployments/dev-profile.sh down
This command will stop and remove the agent containers.
Service Endpoints#
Once deployed, the following services are available:
Service |
URL |
|---|---|
VSS UI |
|
NVStreamer UI |
|
VST UI |
|
Phoenix UI |
|
Appendix: Advanced Deployment Options#
The deployment script supports additional configuration options for advanced use cases. To view all available options, run:
deployments/dev-profile.sh --help
Hardware Profile#
Specify the hardware profile to optimize for your GPU:
deployments/dev-profile.sh up -p alerts -m 2d_vlm -H RTX6000PROBW
Available hardware profiles: H100 (default), L40S, RTX6000PROBW
Host IP Configuration#
Manually specify the host IP address:
deployments/dev-profile.sh up -p alerts -m 2d_vlm -i '<HOST_IP>'
Default: Primary IP from ip route
Externally Accessible IP#
Optionally specify an externally accessible IP address for services that need to be reached from outside the host:
deployments/dev-profile.sh up -p alerts -m 2d_vlm -e '<EXTERNALLY_ACCESSIBLE_IP>'
LLM and VLM Configuration#
Configure the LLM and VLM (NVIDIA Inference Microservice) modes independently:
deployments/dev-profile.sh up -p alerts -m 2d_vlm \
--llm-mode local \
--vlm-mode local
Available modes:
local_shared(default): Shared local NIM instancelocal: Dedicated local NIM instanceremote: Use remote NIM endpoints
Constraint: Both --llm-mode and --vlm-mode must be local_shared, or neither can be local_shared.
For remote LLM and VLM, specify the base URLs:
deployments/dev-profile.sh up -p alerts -m 2d_vlm \
--llm-mode remote \
--vlm-mode remote \
--llm-base-url https://your-llm-endpoint.com \
--vlm-base-url https://your-vlm-endpoint.com
Note
To deploy your own remote NIM endpoint, refer to the NVIDIA NIM Deployment Guide for instructions on setting up NIM on your infrastructure.
Model Selection#
Specify custom LLM and VLM models:
deployments/dev-profile.sh up -p alerts -m 2d_vlm \
--llm llama-3.3-nemotron-super-49b-v1.5 \
--vlm cosmos-reason2-8b
Available LLM models: nvidia-nemotron-nano-9b-v2, nemotron-3-nano, llama-3.3-nemotron-super-49b-v1.5, gpt-oss-20b
Available VLM models: cosmos-reason1-7b, cosmos-reason2-8b, qwen3-vl-8b-instruct
Note
Only the default models nvidia-nemotron-nano-9b-v2 (LLM) and cosmos-reason2-8b (VLM) have been verified on local and local_shared NIM modes.
Device Assignment#
Assign specific GPU devices for LLM and VLM:
deployments/dev-profile.sh up -p alerts -m 2d_vlm \
--llm-device-id 0 \
--vlm-device-id 1
Note: --llm-device-id is not allowed if --llm-mode is remote. --vlm-device-id is not allowed if --vlm-mode is local_shared or remote.
Custom VLM Weights#
The VSS Blueprint supports using custom VLM weights to improve anomaly detection accuracy for specific scenarios or domains.
Download Custom Weights
Before using custom weights, you need to download them from NGC or Hugging Face. For detailed instructions on downloading custom weights, see the Custom VLM Weights section in Prerequisites.
Deploy with Custom Weights
Once you have downloaded custom weights to a local directory, specify the path when deploying:
deployments/dev-profile.sh up -p alerts -m 2d_vlm \
--vlm-custom-weights /path/to/custom/weights
Skip Custom Weights
To deploy without custom weights and use the default model weights (no download, no environment variable set):
deployments/dev-profile.sh up -p alerts -m 2d_vlm \
--vlm-custom-weights None
Dry Run#
To preview the deployment commands without executing them:
deployments/dev-profile.sh up -p alerts -m 2d_vlm -d
Note: The -d or --dry-run flag is also available for the down command.