On-Boarding Help
Where is the HW BOM?
The complete qualified Aerial RAN CoLab Over-the-Air BOM is located in the Procure the Hardware chapter of the Installation Guide.
Does the platform support MU-MIMO?
Aerial RAN CoLab Over-the-Air does not offer MU-MIMO integrated interop, however the same platform is capable of adding software features for MU-MIMO. MU-MIMO support is targeted in Y2023.
Which frequency bands does the platform support?
Aerial RAN CoLab Over-the-Air offers tested solution in n78 band, however with access to source, it can be qualified to interoperate in other sub-6 frequency bands.
How can I apply for an experimental license in United States?
Review the application located at https://apps2.fcc.gov/ELSExperiments/pages/login.htm. If you have a program experimental license (https://apps.fcc.gov/oetcf/els/index.cfm), you can also use it for the Innovation Zone areas (Boston and the PAWR platforms) by submitting a request on that website.
Where can I find utility RF tools and calculators?
Please see the following site https://5g-tools.com/
Is GPS needed?
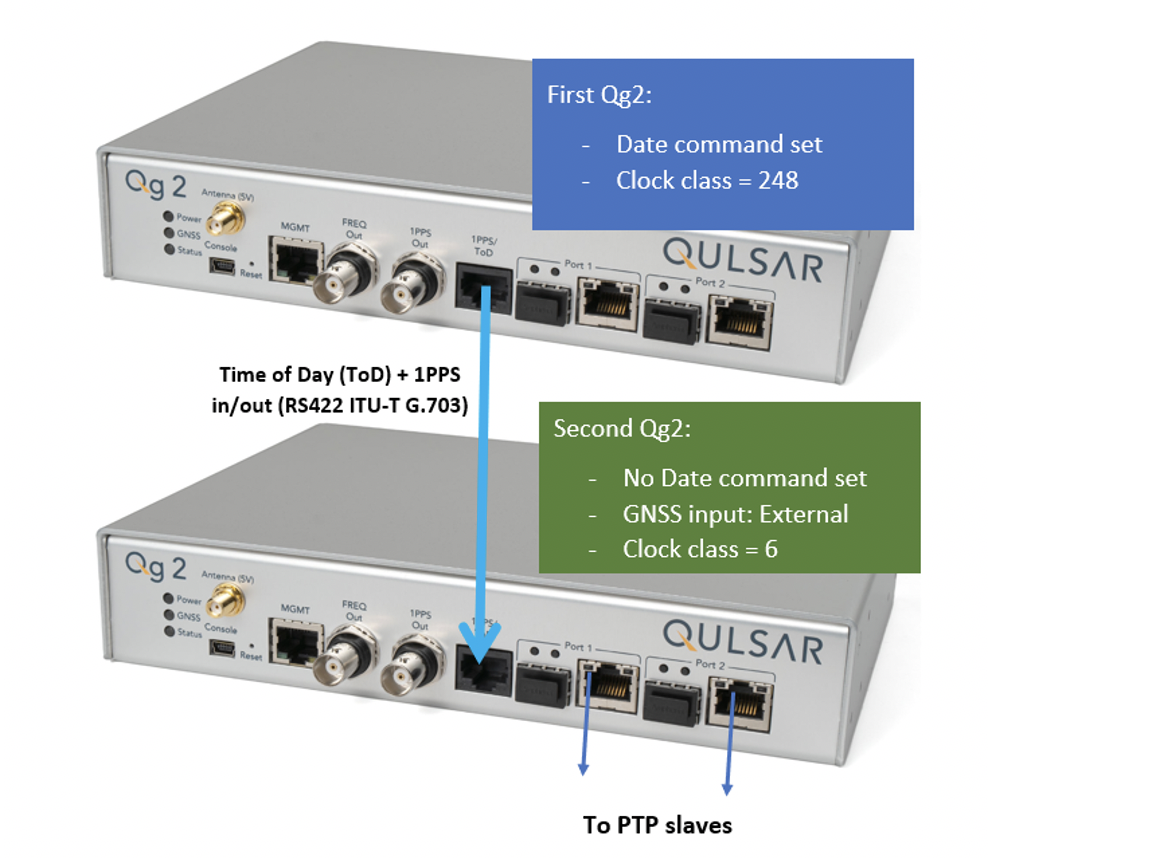
Yes a GPS signal is necessary to drive precision timing for 5G networks. Incase GPS signal is in-accessible, the date command can be used as a workaround. This command is useful for those deployments where there is no timing reference (like GNSS) but needs Qg 2 to act as a Grandmaster to propagate time and synchronization over PTP to slave units.
When using two GMs, you can manually set the date and time on the first one and connect it’s 1PPS/ToD output to the 1PPS/ToD port (configured as input) of the second GM. The second GM then outputs PTP messages with a clock class=6.
Check OS and kernel version and configuration:
aerial@devkit01:~$ cat /proc/cmdline
BOOT_IMAGE=/boot/vmlinuz-5.4.0-65-lowlatency root=UUID=d0bc583b-6922-4e70-af14-92b624fe1bbe ro default_hugepagesz=1G hugepagesz=1G hugepages=16 tsc=reliable clocksource=tsc intel_idle.max_cstate=0 mce=ignore_ce processor.max_cstate=0 intel_pstate=disable audit=0 idle=poll isolcpus=2-21 nohz_full=2-21 rcu_nocbs=2-21 rcu_nocb_poll nosoftlockup iommu=off intel_iommu=off irqaffinity=0-1,22-23
aerial@devkit01:~$ uname -a
Linux devkit01 5.4.0-65-lowlatency #73-Ubuntu SMP PREEMPT Mon Jan 18 18:17:38 UTC 2021 x86_64 x86_64 x86_64 GNU/Linux
For your convenience, shell script to build Aerial SDK, create the script in /opt/nvidia/cuBB:
#!/bin/bash
SCRIPT=$(readlink -f $0)
SCRIPT_DIR=$(dirname $SCRIPT)
echo running $SCRIPT
echo running $SCRIPT_DIR
export cuBB_SDK=${SCRIPT_DIR}
insModScript=${SCRIPT_DIR}/cuPHY-CP/external/gdrcopy/
echo $insModScript
cd $insModScript && make && ./insmod.sh && cd -
export LD_LIBRARY_PATH=$cuBB_SDK/gpu-dpdk/build/install/lib/x86_64-linux-gnu
echo $LD_LIBRARY_PATH | sudo tee /etc/ld.so.conf.d/aerial-dpdk.conf
sudo ldconfig
echo "perhaps you want to: "
echo "mkdir build && cd build && cmake .. "
mkdir -p build && cd $_ && cmake .. && time chrt -r 1 taskset -c 2-20 make -j
For your convenience, shell script to start cuphycontroller, create the script in /opt/nvidia/cuBB:
#!/bin/bash
sudo nvidia-smi -pm 1
sudo nvidia-smi -i 0 -lgc $(sudo nvidia-smi -i 0 --query-supported-clocks=graphics --format=csv,noheader,nounits | sort -h | tail -n 1)
SCRIPT=$(readlink -f $0)
SCRIPT_DIR=$(dirname $SCRIPT)
echo running $SCRIPT
echo running $SCRIPT_DIR
export cuBB_SDK=${SCRIPT_DIR}
insModScript=${SCRIPT_DIR}/cuPHY-CP/external/gdrcopy/
echo $insModScript
cd $insModScript && ./insmod.sh && cd -
export LD_LIBRARY_PATH=$cuBB_SDK/gpu-dpdk/build/install/lib/x86_64-linux-gnu:$cuBB_SDK/build/cuPHY-CP/cuphydriver/src
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:/opt/mellanox/gdrcopy/src
export LD_LIBRARY_PATH=${LD_LIBRARY_PATH}:/opt/mellanox/dpdk/lib/x86_64-linux-gnu:/opt/mellanox/doca/lib/x86_64-linux-gnu
echo $LD_LIBRARY_PATH | sed 's/:/\n/g' | sudo tee /etc/ld.so.conf.d/aerial-dpdk.conf
sudo ldconfig
export GDRCOPY_PATH_L=$cuBB_SDK/cuPHY-CP/external/gdrcopy/src
export CUDA_MPS_PIPE_DIRECTORY=/var
export CUDA_MPS_LOG_DIRECTORY=/var
sudo -E nvidia-cuda-mps-control -d
sudo -E echo start_server -uid 0 | sudo -E nvidia-cuda-mps-control
sleep 5
echo "perhaps you want to: "
echo "sudo -E LD_LIBRARY_PATH=$cuBB_SDK/gpu-dpdk/build/install/lib/x86_64-linux-gnu/ ./build/cuPHY-CP/cuphycontroller/examples/cuphycontroller_scf P5G_SCF_FXN"
sudo -E ./build/cuPHY-CP/cuphycontroller/examples/cuphycontroller_scf P5G_SCF_FXN
sudo ./build/cuPHY-CP/gt_common_libs/nvIPC/tests/pcap/pcap_collect
Logfiles generated while installing tools, OS and NVIDIA SW/FW can be found below:

Below page is a reference to the syllabus from NVIDIA/UIUC Accelerated Computing Teaching Kit and outlines each module’s organization in the downloaded Teaching Kit http://gputeachingkit.hwu.crhc.illinois.edu/.