
#include <PxVehicleDriveNW.h>
Public Member Functions | |
| void | free () |
| Deallocate a PxVehicleDriveNW instance. | |
| void | setup (PxPhysics *physics, PxRigidDynamic *vehActor, const PxVehicleWheelsSimData &wheelsData, const PxVehicleDriveSimDataNW &driveData, const PxU32 nbWheels) |
| Set up a vehicle using simulation data for the wheels and drive model. | |
| void | setToRestState () |
| Set a vehicle to its rest state. Aside from the rigid body transform, this will set the vehicle and rigid body to the state they were in immediately after setup or create. | |
| PxVehicleDriveNW (PxBaseFlags baseFlags) | |
| PxVehicleDriveNW () | |
| ~PxVehicleDriveNW () | |
| virtual const char * | getConcreteTypeName () const |
| Returns string name of dynamic type. | |
| virtual bool | isKindOf (const char *name) const |
| Returns whether a given type name matches with the type of this instance. | |
Static Public Member Functions | |
| static PxVehicleDriveNW * | allocate (const PxU32 nbWheels) |
| Allocate a PxVehicleDriveNW instance for a NWDrive vehicle with nbWheels. | |
| static PxVehicleDriveNW * | create (PxPhysics *physics, PxRigidDynamic *vehActor, const PxVehicleWheelsSimData &wheelsData, const PxVehicleDriveSimDataNW &driveData, const PxU32 nbWheels) |
| Allocate and set up a vehicle using simulation data for the wheels and drive model. | |
| static PxVehicleDriveNW * | createObject (PxU8 *&address, PxDeserializationContext &context) |
| static void | getBinaryMetaData (PxOutputStream &stream) |
Public Attributes | |
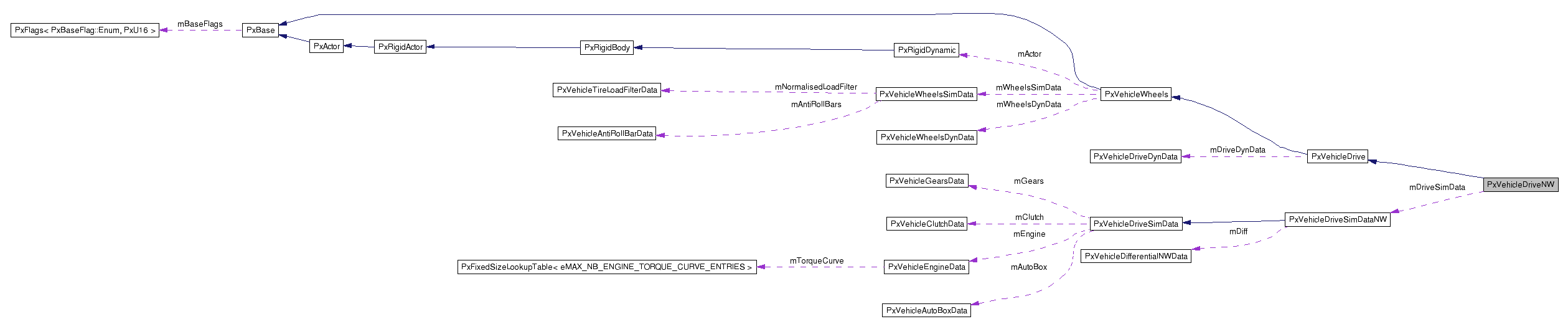
| PxVehicleDriveSimDataNW | mDriveSimData |
| Simulation data that describes the configuration of the vehicle's drive model. | |
Private Member Functions | |
| bool | isValid () const |
| Test if the instanced dynamics and configuration data has legal values. | |
Friends | |
| class | PxVehicleUpdate |
| PxVehicleDriveNW::PxVehicleDriveNW | ( | PxBaseFlags | baseFlags | ) | [inline] |
| PxVehicleDriveNW::PxVehicleDriveNW | ( | ) |
| PxVehicleDriveNW::~PxVehicleDriveNW | ( | ) | [inline] |
| static PxVehicleDriveNW* PxVehicleDriveNW::allocate | ( | const PxU32 | nbWheels | ) | [static] |
Allocate a PxVehicleDriveNW instance for a NWDrive vehicle with nbWheels.
| [in] | nbWheels | is the number of wheels on the vehicle. |
| static PxVehicleDriveNW* PxVehicleDriveNW::create | ( | PxPhysics * | physics, | |
| PxRigidDynamic * | vehActor, | |||
| const PxVehicleWheelsSimData & | wheelsData, | |||
| const PxVehicleDriveSimDataNW & | driveData, | |||
| const PxU32 | nbWheels | |||
| ) | [static] |
Allocate and set up a vehicle using simulation data for the wheels and drive model.
| [in] | physics | is a PxPhysics instance that is needed to create special vehicle constraints that are maintained by the vehicle. |
| [in] | vehActor | is a PxRigidDynamic instance that is used to represent the vehicle in the PhysX SDK. |
| [in] | wheelsData | describes the configuration of all suspension/tires/wheels of the vehicle. The vehicle instance takes a copy of this data. |
| [in] | driveData | describes the properties of the vehicle's drive model (gears/engine/clutch/differential/autobox). The vehicle instance takes a copy of this data. |
| [in] | nbWheels | is the number of wheels on the vehicle. |
| static PxVehicleDriveNW* PxVehicleDriveNW::createObject | ( | PxU8 *& | address, | |
| PxDeserializationContext & | context | |||
| ) | [static] |
| void PxVehicleDriveNW::free | ( | ) |
| static void PxVehicleDriveNW::getBinaryMetaData | ( | PxOutputStream & | stream | ) | [static] |
Reimplemented from PxVehicleDrive.
| virtual const char* PxVehicleDriveNW::getConcreteTypeName | ( | ) | const [inline, virtual] |
Returns string name of dynamic type.
Reimplemented from PxVehicleDrive.
| virtual bool PxVehicleDriveNW::isKindOf | ( | const char * | superClass | ) | const [inline, virtual] |
Returns whether a given type name matches with the type of this instance.
Reimplemented from PxVehicleDrive.
References PxBase::isKindOf().
| bool PxVehicleDriveNW::isValid | ( | ) | const [private] |
Test if the instanced dynamics and configuration data has legal values.
Reimplemented from PxVehicleDrive.
| void PxVehicleDriveNW::setToRestState | ( | ) |
Set a vehicle to its rest state. Aside from the rigid body transform, this will set the vehicle and rigid body to the state they were in immediately after setup or create.
Reimplemented from PxVehicleDrive.
| void PxVehicleDriveNW::setup | ( | PxPhysics * | physics, | |
| PxRigidDynamic * | vehActor, | |||
| const PxVehicleWheelsSimData & | wheelsData, | |||
| const PxVehicleDriveSimDataNW & | driveData, | |||
| const PxU32 | nbWheels | |||
| ) |
Set up a vehicle using simulation data for the wheels and drive model.
| [in] | physics | is a PxPhysics instance that is needed to create special vehicle constraints that are maintained by the vehicle. |
| [in] | vehActor | is a PxRigidDynamic instance that is used to represent the vehicle in the PhysX SDK. |
| [in] | wheelsData | describes the configuration of all suspension/tires/wheels of the vehicle. The vehicle instance takes a copy of this data. |
| [in] | driveData | describes the properties of the vehicle's drive model (gears/engine/clutch/differential/autobox). The vehicle instance takes a copy of this data. |
| [in] | nbWheels | is the number of wheels on the vehicle. |
friend class PxVehicleUpdate [friend] |
Reimplemented from PxVehicleDrive.