
#include <PxCooking.h>
Public Member Functions | |
| PxCookingParams (const PxTolerancesScale &sc) | |
Public Attributes | |
| PxPlatform::Enum | targetPlatform |
| Target platform. | |
| PX_DEPRECATED float | skinWidth |
| Skin width for convexes. | |
| float | areaTestEpsilon |
| Zero-size area epsilon used in convex hull computation. | |
| float | planeTolerance |
| Plane tolerance used in convex hull computation. | |
| PxConvexMeshCookingType::Enum | convexMeshCookingType |
| Convex hull creation algorithm. | |
| bool | suppressTriangleMeshRemapTable |
| When true, the face remap table is not created. This saves a significant amount of memory, but the SDK will not be able to provide the remap information for internal mesh triangles returned by collisions, sweeps or raycasts hits. | |
| bool | buildTriangleAdjacencies |
| When true, the triangle adjacency information is created. You can get the adjacency triangles for a given triangle from getTriangle. | |
| bool | buildGPUData |
| When true, addigional information required for GPU-accelerated rigid body simulation is created. This can increase memory usage and cooking times for convex meshes and triangle meshes. | |
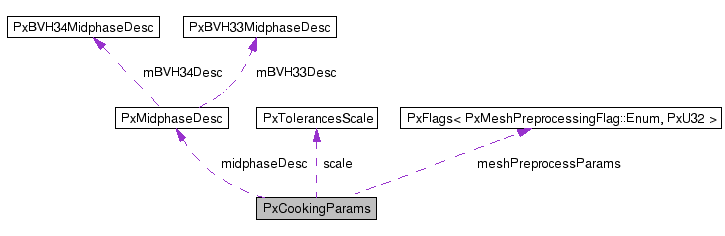
| PxTolerancesScale | scale |
| Tolerance scale is used to check if cooked triangles are not too huge. This check will help with simulation stability. | |
| PxMeshPreprocessingFlags | meshPreprocessParams |
| Mesh pre-processing parameters. Used to control options like whether the mesh cooking performs vertex welding before cooking. | |
| PX_DEPRECATED PxMeshCookingHint::Enum | meshCookingHint |
| Mesh cooking hint. Used to specify mesh hierarchy construction preference. | |
| PX_DEPRECATED PxF32 | meshSizePerformanceTradeOff |
| Controls the trade-off between mesh size and runtime performance. | |
| PxReal | meshWeldTolerance |
| Mesh weld tolerance. If mesh welding is enabled, this controls the distance at which vertices are welded. If mesh welding is not enabled, this value defines the acceptance distance for mesh validation. Provided no two vertices are within this distance, the mesh is considered to be clean. If not, a warning will be emitted. Having a clean, welded mesh is required to achieve the best possible performance. | |
| PxMidphaseDesc | midphaseDesc |
| Controls the desired midphase desc structure for triangle meshes. | |
| PxU32 | gaussMapLimit |
| Vertex limit beyond which additional acceleration structures are computed for each convex mesh. Increase that limit to reduce memory usage. Computing the extra structures all the time does not guarantee optimal performance. There is a per-platform break-even point below which the extra structures actually hurt performance. | |
| PxCookingParams::PxCookingParams | ( | const PxTolerancesScale & | sc | ) | [inline] |
References PxPlatform::eARM, PxPlatform::ePC, and PxGetGaussMapVertexLimitForPlatform().
Zero-size area epsilon used in convex hull computation.
If the area of a triangle of the hull is below this value, the triangle will be rejected. This test is done only if PxConvexFlag::eCHECK_ZERO_AREA_TRIANGLES is used.
Default value: 0.06f*PxTolerancesScale.length*PxTolerancesScale.length
Range: (0.0f, PX_MAX_F32)
When true, addigional information required for GPU-accelerated rigid body simulation is created. This can increase memory usage and cooking times for convex meshes and triangle meshes.
Default value: false
When true, the triangle adjacency information is created. You can get the adjacency triangles for a given triangle from getTriangle.
Default value: false
Convex hull creation algorithm.
Default value: PxConvexMeshCookingType::eQUICKHULL
Vertex limit beyond which additional acceleration structures are computed for each convex mesh. Increase that limit to reduce memory usage. Computing the extra structures all the time does not guarantee optimal performance. There is a per-platform break-even point below which the extra structures actually hurt performance.
Default value: 32
| PX_DEPRECATED PxMeshCookingHint::Enum PxCookingParams::meshCookingHint |
Mesh cooking hint. Used to specify mesh hierarchy construction preference.
Mesh pre-processing parameters. Used to control options like whether the mesh cooking performs vertex welding before cooking.
Default value: 0
| PX_DEPRECATED PxF32 PxCookingParams::meshSizePerformanceTradeOff |
Controls the trade-off between mesh size and runtime performance.
Using a value of 1.0 will produce a larger cooked mesh with generally higher runtime performance, using 0.0 will produce a smaller cooked mesh, with generally lower runtime performance.
Values outside of [0,1] range will be clamped and cause a warning when any mesh gets cooked.
Mesh weld tolerance. If mesh welding is enabled, this controls the distance at which vertices are welded. If mesh welding is not enabled, this value defines the acceptance distance for mesh validation. Provided no two vertices are within this distance, the mesh is considered to be clean. If not, a warning will be emitted. Having a clean, welded mesh is required to achieve the best possible performance.
The default vertex welding uses a snap-to-grid approach. This approach effectively truncates each vertex to integer values using meshWeldTolerance. Once these snapped vertices are produced, all vertices that snap to a given vertex on the grid are remapped to reference a single vertex. Following this, all triangles' indices are remapped to reference this subset of clean vertices. It should be noted that the vertices that we do not alter the position of the vertices; the snap-to-grid is only performed to identify nearby vertices.
The mesh validation approach also uses the same snap-to-grid approach to identify nearby vertices. If more than one vertex snaps to a given grid coordinate, we ensure that the distance between the vertices is at least meshWeldTolerance. If this is not the case, a warning is emitted.
Default value: 0.0
Controls the desired midphase desc structure for triangle meshes.
Plane tolerance used in convex hull computation.
The value is used during hull construction. When a new point is about to be added to the hull it gets dropped when the point is closer to the hull than the planeTolerance. The planeTolerance is increased according to the hull size.
If 0.0f is set all points are accepted when the convex hull is created. This may lead to edge cases where the new points may be merged into an existing polygon and the polygons plane equation might slightly change therefore. This might lead to failures during polygon merging phase in the hull computation.
It is recommended to use the default value, however if it is required that all points needs to be accepted or huge thin convexes are created, it might be required to lower the default value.
Range: <0.0f, PX_MAX_F32)
Tolerance scale is used to check if cooked triangles are not too huge. This check will help with simulation stability.
| PX_DEPRECATED float PxCookingParams::skinWidth |
Skin width for convexes.
Specifies the amount to inflate the convex mesh when the inflation algorithm is used.
The value is used for moving planes outward, and beveling sharp edges. This helps the hull generator code produce more stable convexes for collision detection. Please note that the resulting hull will increase its size, so contact generation may produce noticeable separation between shapes. The separation distance can be reduced by decreasing the contactOffset and restOffset. See the user's manual on 'Shapes - Tuning Shape Collision Behavior' for details.
Change the value if the produced hulls are too thin or improper for your usage. Increasing the value too much will result in incorrect hull size and a large separation between shapes.
Range: (0.0f, PX_MAX_F32)
When true, the face remap table is not created. This saves a significant amount of memory, but the SDK will not be able to provide the remap information for internal mesh triangles returned by collisions, sweeps or raycasts hits.
Default value: false
Target platform.
Should be set to the platform which you intend to load the cooked mesh data on. This allows the SDK to optimize the mesh data in an appropriate way for the platform and make sure that endianness issues are accounted for correctly.
Default value: Same as the platform on which the SDK is running.