Defines all types needed for programming with VPI. More...
#include "ImageFormat.h"#include "Interpolation.h"#include "PixelType.h"#include "Status.h"#include "Version.h"#include <stdint.h> Include dependency graph for Types.h:
Include dependency graph for Types.h: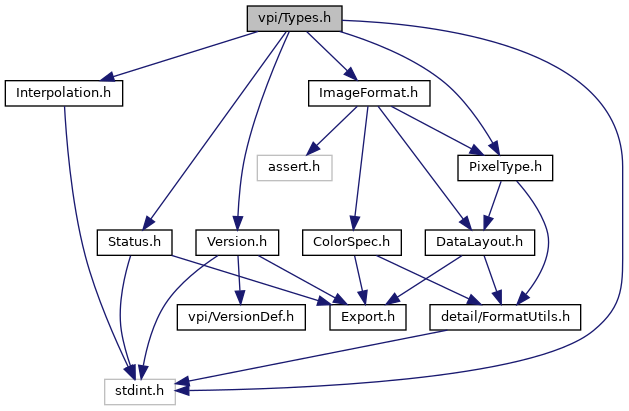 This graph shows which files directly or indirectly include this file:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Data Structures | |
| struct | VPIParallelForConfig |
| Stores the ParallelFor configuration. More... | |
| struct | VPIPyramidalKeypointF32 |
| Stores a float32 pyramidal-based keypoint coordinate The coordinate includes the (x, y) position in an image inside a pyramid, and (octave and layer) selects a specific image on that pyramid. More... | |
| struct | VPIKeypointF32 |
| Stores a float32 keypoint coordinate The coordinate is relative to the top-left corner of an image. More... | |
| struct | VPIKeypointU32 |
| Stores a U32 keypoint coordinate The coordinate is relative to the top-left corner of an image. More... | |
| struct | VPIBriefDescriptor |
| Stores a BRIEF Descriptor. More... | |
| struct | VPIHomographyTransform2D |
| Stores a generic 2D homography transform. More... | |
| struct | VPIBoundingBox |
| Stores a generic 2D bounding box. More... | |
| struct | VPIAxisAlignedBoundingBoxF32 |
| Stores an axis-aligned 32-bit floating point 2D bounding box. More... | |
| struct | VPIKLTTrackedBoundingBox |
| Stores a bounding box that is being tracked by KLT Tracker. More... | |
| struct | VPIDCFTrackedBoundingBox |
| Stores information about an object tracked by DCF Tracker. More... | |
| struct | VPIStats |
| Stores the statistics of an image. More... | |
| struct | VPIMatches |
| Stores the matches between 2 descriptors. More... | |
| struct | VPIRectangleI |
| Stores the geometric information of a rectangle. More... | |
| struct | VPIAprilTagDetection |
| Stores information about an AprilTag detection from AprilTag detector. More... | |
| struct | VPIPose |
| Estimation of a transformation from one 3D coordinate system to another with object-space error. More... | |
Macros | |
| #define | VPI_BRIEF_DESCRIPTOR_ARRAY_LENGTH 32 |
| Length of Brief Descriptor Array. | |
| #define | VPI_BRIEF_DESCRIPTOR_BIT_WIDTH (VPI_BRIEF_DESCRIPTOR_ARRAY_LENGTH * 8) |
| Length of Brief Descriptor in bits. | |
| #define | VPI_MAX_MATCHES_PER_DESCRIPTOR (3) |
| Maximum number of matches per descriptor. | |
| #define | VPI_TERMINATION_CRITERIA_ITERATIONS (1u << 0) |
| Defines the termination criteria macros. More... | |
| #define | VPI_TERMINATION_CRITERIA_EPSILON (1u << 1) |
| Termination based on maximum error (epsilon). | |
| #define | VPI_STAT_PIXEL_COUNT (1U << 0) |
| Defines which statistics to be calculated. More... | |
| #define | VPI_STAT_SUM (1U << 1) |
| Calculate per-channel sum. | |
| #define | VPI_STAT_MEAN ((1U << 2) | VPI_STAT_SUM | VPI_STAT_PIXEL_COUNT) |
| Calculate per-channel mean. | |
| #define | VPI_STAT_VARIANCE ((1U << 3) | VPI_STAT_MEAN) |
| Calculate covariance matrix with variance of each channel. | |
| #define | VPI_STAT_COVARIANCE ((1U << 4) | VPI_STAT_VARIANCE) |
| Calculate full covariance matrix. | |
Common object flags. | |
| #define | VPI_EXCLUSIVE_STREAM_ACCESS (1ULL << 16) |
| Specifies that the memory will be accessed by only one stream at a time. More... | |
| #define | VPI_RESTRICT_MEM_USAGE (1ULL << 17) |
| Flag to restrict memory resources usage. More... | |
| #define | VPI_REQUIRE_BACKENDS (1ULL << 18) |
| Require creation of requested backends. More... | |
Typedefs | |
| typedef void(* | VPIParallelTask) (int taskId, int threadId, void *vpiData) |
| Parallel task function pointer type. | |
| typedef void(* | VPIParallelForCallback) (VPIParallelTask task, int taskCount, void *vpiData, void *userData) |
| Parallel for callback function pointer type. More... | |
| typedef void * | VPINativeThreadHandle |
| A handle to OS-specific thread handle. | |
| typedef struct VPIArrayImpl * | VPIArray |
| A handle to an array. | |
| typedef struct VPIContextImpl * | VPIContext |
| A handle to a context. | |
| typedef struct VPIEventImpl * | VPIEvent |
| A handle to an event. | |
| typedef struct VPIStreamImpl * | VPIStream |
| A handle to a stream. | |
| typedef struct VPIImageImpl * | VPIImage |
| A handle to an image. | |
| typedef struct VPIPyramidImpl * | VPIPyramid |
| A handle to an image pyramid. | |
| typedef struct VPIPayloadImpl * | VPIPayload |
| A handle to an algorithm payload. | |
| typedef unsigned char | VPIByte |
| Definition of a byte type. More... | |
| typedef float | VPICameraIntrinsic[2][3] |
| Camera intrinsic matrix. More... | |
| typedef float | VPICameraExtrinsic[3][4] |
| Camera extrinsic matrix. More... | |
| typedef float | VPIPerspectiveTransform[3][3] |
| Represents a 2D perspective transform. More... | |
Enumerations | |
| enum | VPIBorderExtension |
| Image border extension specify how pixel values outside of the image domain should be constructed. More... | |
| enum | VPIConversionPolicy |
| Policy used when converting between image types. More... | |
| enum | VPICornerScore |
| Defines different types of corner scores. More... | |
| enum | VPITrackingState |
| Object tracking state. More... | |
| enum | VPIOpticalFlowQuality |
| Defines the quality of the optical flow algorithm. More... | |
| enum | VPILockMode |
| Defines the lock modes used by memory lock functions. More... | |
| enum | VPIEventState |
| Defines the states of the event. More... | |
| enum | VPIFlipMode |
| Defines image flip directions. More... | |
| enum | VPINormType |
| Defines the magnitude of vectors. More... | |
| enum | VPIGradientMethod |
| Different method to generate gradients. More... | |
Memory creation flags. | |
These flags can be used when creating images, pyramids or arrays. | |
| #define | VPI_BACKEND_TEGRA (VPI_BACKEND_VIC | VPI_BACKEND_OFA) |
| Tegra-only backends. | |
| #define | VPI_BACKEND_MASK ((VPI_BACKEND_INVALID << 1) - 1) |
| Tegra-only backends. | |
| #define | VPI_BACKEND_ALL (VPI_BACKEND_CPU | VPI_BACKEND_CUDA | VPI_BACKEND_PVA | VPI_BACKEND_VIC | VPI_BACKEND_OFA) |
| All backends. | |
| enum | VPIBackend |
| VPI Backend types. More... | |
Detailed Description
Defines all types needed for programming with VPI.
Definition in file Types.h.
Data Structure Documentation
◆ VPIBriefDescriptor
| struct VPIBriefDescriptor |
Collaboration diagram for VPIBriefDescriptor:
| Data Fields | ||
|---|---|---|
| uint8_t | data[VPI_BRIEF_DESCRIPTOR_ARRAY_LENGTH] | Description vector of a BRIEF descriptor. |
Macro Definition Documentation
◆ VPI_EXCLUSIVE_STREAM_ACCESS
| #define VPI_EXCLUSIVE_STREAM_ACCESS (1ULL << 16) |
Specifies that the memory will be accessed by only one stream at a time.
By default memories are created up so that at multiple streams can access it for reading simultaneously. Doing so might incur in increased system resources utilization. By specifying this flag when creating a VPIImage, VPIArray or VPIPyramid, when it's known that they won't be used concurrently by different streams, better resource allocation is achieved.
◆ VPI_RESTRICT_MEM_USAGE
| #define VPI_RESTRICT_MEM_USAGE (1ULL << 17) |
Flag to restrict memory resources usage.
When passed as flags to certain VPI functions, it will instruct them to use less memory resources, in exchange of limiting their functionality. Please refer to documentation of these functions for further explanation on the trade-offs involved.
◆ VPI_REQUIRE_BACKENDS
| #define VPI_REQUIRE_BACKENDS (1ULL << 18) |
Require creation of requested backends.
With this flag set, the creation functions will require that the given backends are created. If any fail, the creation function will return an error. If not set, it'll try to enable the given backends, but disable the ones that are incompatible with the object parameters or not enabled in current context.
- Note
- When applied to a context, this flag isn't propagated to objects created when this context is active.
◆ VPI_STAT_PIXEL_COUNT
| #define VPI_STAT_PIXEL_COUNT (1U << 0) |
Typedef Documentation
◆ VPIByte
| typedef unsigned char VPIByte |
Enumeration Type Documentation
◆ VPICornerScore
| enum VPICornerScore |
◆ VPITrackingState
| enum VPITrackingState |
Object tracking state.
| Enumerator | |
|---|---|
| VPI_TRACKING_STATE_LOST | Object isn't being tracked anymore. This state is either set by the user when this object doesn't need to be tracked anymore, or by the tracking function given some tracking confidence criteria. Existing objects with state VPI_TRACKING_STATE_LOST can be reused for new objects. The valid transitions from this state are: |
| VPI_TRACKING_STATE_NEW | New object to be tracked. This state is defined by the user for new objects to be tracked. The valid transitions from this state are: |
| VPI_TRACKING_STATE_TRACKED | Object is being tracked with high confidence. The object is being localized in the input frames and because there's a high confidence (established externally) that the bounding box is accurate, its internal model can be updated with the currently estimated position. The valid transitions from this state are: |
| VPI_TRACKING_STATE_SHADOW_TRACKED | Object is being tracked with low confidence. The object localized in the frame, but its model is not being updated because there's a low confidence on its bounding box location/size. The valid transitions from this state are: |
◆ VPIFlipMode
| enum VPIFlipMode |
Defines image flip directions.
This is used by algorithms such as Image Flip
| Enumerator | |
|---|---|
| VPI_FLIP_HORIZ | Flip horizontally. |
| VPI_FLIP_VERT | Flip vertically. |
| VPI_FLIP_BOTH | Flip horizontally and vertically. This effectively rotates the image 180 degrees. |
◆ VPINormType
| enum VPINormType |
Defines the magnitude of vectors.
This is used by algorithms such as Canny edge detector
| Enumerator | |
|---|---|
| VPI_NORM_L1 | L1 norm. |
| VPI_NORM_L2 | L2 norm. |
| VPI_NORM_HAMMING | Hamming norm. |
◆ VPIGradientMethod
| enum VPIGradientMethod |