Detect AprilTags (https://april.eecs.umich.edu/software/apriltag) in an image. More...
Data Structures | |
| struct | VPIAprilTagDecodeParams |
| Decode parameters for vpiCreateAprilTagDetector. More... | |
| struct | VPIAprilTagDetection |
| Stores information about an AprilTag detection from AprilTag detector. More... | |
Enumerations | |
| enum | VPIAprilTagFamily |
| Specify the family of AprilTags to detect. More... | |
Functions | |
| VPIStatus | vpiInitAprilTagDecodeParams (VPIAprilTagDecodeParams *params) |
| Initializes VPIAprilTagDecodeParams with default values. More... | |
| VPIStatus | vpiCreateAprilTagDetector (uint64_t backends, int32_t inputWidth, int32_t inputHeight, VPIAprilTagDecodeParams const *params, VPIPayload *payload) |
| Creates a AprilTag detector payload. More... | |
| VPIStatus | vpiSubmitAprilTagDetector (VPIStream stream, uint64_t backend, VPIPayload payload, uint32_t maxDetections, VPIImage input, VPIArray outDetections) |
| Submits a AprilTag detector operation to the stream. More... | |
| VPIStatus | vpiSubmitAprilTagPoseEstimation (VPIStream stream, uint64_t backend, VPIArray inDetections, const VPICameraIntrinsic intrinsics, float tagSize, VPIArray outPoses) |
| Submits a AprilTag pose estimation operation to the stream. More... | |
Detailed Description
Detect AprilTags (https://april.eecs.umich.edu/software/apriltag) in an image.
Refer to AprilTag Detector and Pose Estimator for more details and usage examples.
Data Structure Documentation
◆ VPIAprilTagDecodeParams
| struct VPIAprilTagDecodeParams |
Decode parameters for vpiCreateAprilTagDetector.
Specifies family to decode and decode properties.
Definition at line 113 of file AprilTags.h.
 Collaboration diagram for VPIAprilTagDecodeParams:
Collaboration diagram for VPIAprilTagDecodeParams:
| Data Fields | ||
|---|---|---|
| const uint16_t * | tagIdFilter |
Optional array of tag ids from family which represent valid detections. Set to NULL to detect all tags from the family Data can be freed after call to vpiCreateAprilTagDetector. |
| int32_t | tagIdFilterSize |
Size of tagIdFilter array if not NULL.
|
| int32_t | maxBitsCorrected |
Maximum number of bits to correct during decoding.
|
| VPIAprilTagFamily | family | Which family to detect. |
◆ VPIAprilTagDetection
| struct VPIAprilTagDetection |
Stores information about an AprilTag detection from AprilTag detector.
Collaboration diagram for VPIAprilTagDetection: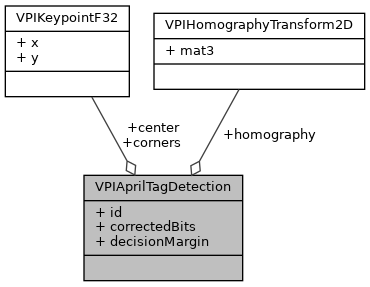
| Data Fields | ||
|---|---|---|
| uint16_t | id | The decoded ID of the tag. |
| int16_t | correctedBits | Number of bits corrected for this detection. |
| float | decisionMargin |
A measure of the quality of the binary decoding process: the average difference between the intensity of a data bit versus the decision threshold. Higher numbers roughly indicate better decodes. This is a reasonable measure of detection accuracy only for very small tags. |
| VPIHomographyTransform2D | homography | The 3x3 homography matrix describing the projection from an "ideal" tag (with corners at (-1,1), (1,1), (1,-1), and (-1, -1)) to pixels in the image. |
| VPIKeypointF32 | center | The center of the detection in image pixel coordinates. |
| VPIKeypointF32 | corners[4] | The corners of the tag in image pixel coordinates, ordered counter-clockwise. |
Enumeration Type Documentation
◆ VPIAprilTagFamily
| enum VPIAprilTagFamily |
#include <vpi/algo/AprilTags.h>
Specify the family of AprilTags to detect.
The family is defined by the layout, the number of bits in the tag and the minimum hamming distance between valid codewords.
Definition at line 83 of file AprilTags.h.
Function Documentation
◆ vpiInitAprilTagDecodeParams()
| VPIStatus vpiInitAprilTagDecodeParams | ( | VPIAprilTagDecodeParams * | params | ) |
#include <vpi/algo/AprilTags.h>
Initializes VPIAprilTagDecodeParams with default values.
Defaults:
- tagIdFilter: NULL
- tagIdFilterSize: 0
- maxBitsCorrected: 2
- family: VPI_APRILTAG_36H11
- See also
- Algorithm Details
- Parameters
-
[out] params Structure to be filled with default values.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT paramsis NULLVPI_SUCCESS Operation executed successfully.
◆ vpiCreateAprilTagDetector()
| VPIStatus vpiCreateAprilTagDetector | ( | uint64_t | backends, |
| int32_t | inputWidth, | ||
| int32_t | inputHeight, | ||
| VPIAprilTagDecodeParams const * | params, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/AprilTags.h>
Creates a AprilTag detector payload.
This function allocates all temporary memory needed by the algorithm.
- See also
- Algorithm Details
- Parameters
-
[in] backends VPI backends that are eligible to execute the algorithm. - Valid values:
- Backend must be enabled in current context.
- If VPI_BACKEND_PVA is used, the VPIStream and input/output buffers must support both VPI_BACKEND_PVA and VPI_BACKEND_CPU.
[in] inputWidth,inputHeight Dimensions of the input image that will be used with this payload. - Must be > 0.
[in] params Decode parameters for the detector. Pass NULL to use the defaults given by vpiInitAprilTagDecodeParams. [out] payload Pointer to the payload variable that receives the created handle.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT payloadis NULL.VPI_ERROR_INVALID_ARGUMENT backendsrefers to an invalid backend.VPI_ERROR_INVALID_ARGUMENT inputWidthorinputHeightoutside valid range.VPI_ERROR_INVALID_ARGUMENT paramsis NULL or contains invalid configuration.VPI_ERROR_INVALID_OPERATION Backend hardware not available, or backend not available in current context. VPI_ERROR_NOT_IMPLEMENTED Algorithm does not support the given backend. VPI_ERROR_INVALID_CONTEXT Current context is destroyed. VPI_ERROR_OUT_OF_MEMORY Cannot allocate required resources. VPI_SUCCESS Operation executed successfully.
◆ vpiSubmitAprilTagDetector()
| VPIStatus vpiSubmitAprilTagDetector | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| uint32_t | maxDetections, | ||
| VPIImage | input, | ||
| VPIArray | outDetections | ||
| ) |
#include <vpi/algo/AprilTags.h>
Submits a AprilTag detector operation to the stream.
- See also
- Algorithm Details
- Parameters
-
[in] stream The stream where the operation will be queued in. - Must not be NULL.
- Stream must have enabled the backends that will execute the algorithm.
[in] backend Backend that will execute the algorithm. - Must be the backend specified during payload creation or 0 as a shorthand to use this backend.
[in] payload Payload to be submitted along the other parameters. [in] maxDetections Maximum number of detections to be returned in outDetections. [in] input Input image used for detection - Must not be NULL.
- Must match dimensions used in vpiCreateAprilTagDetector.
- Image must have enabled the backends that will execute the algorithm.
- Must have format VPI_IMAGE_FORMAT_U8
[out] outDetections Array that will receive the detections. Array size is updated with the number of tags found. - Must not be NULL.
- It must have type VPI_ARRAY_TYPE_APRILTAG_DETECTION.
- Array must have enabled the backends that will execute the algorithm.
- If more tags are detected than the array capacity, extra tag detections are discarded.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT streamis NULL.VPI_ERROR_INVALID_ARGUMENT inputis NULL.VPI_ERROR_INVALID_ARGUMENT inputimage dimensions do not match dimensions passed to vpiCreateAprilTagDetector.VPI_ERROR_INVALID_ARGUMENT backenddoes not match the backend used to create the payload.VPI_ERROR_INVALID_IMAGE_FORMAT inputimage format not supported.VPI_ERROR_INVALID_PAYLOAD_TYPE payloadis invalid or NULL.VPI_ERROR_NOT_IMPLEMENTED Algorithm does not support the given backend. VPI_ERROR_INVALID_OPERATION Backend hardware not available. VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in stream,inputoroutDetections.VPI_SUCCESS Operation executed successfully.
◆ vpiSubmitAprilTagPoseEstimation()
| VPIStatus vpiSubmitAprilTagPoseEstimation | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIArray | inDetections, | ||
| const VPICameraIntrinsic | intrinsics, | ||
| float | tagSize, | ||
| VPIArray | outPoses | ||
| ) |
#include <vpi/algo/AprilTags.h>
Submits a AprilTag pose estimation operation to the stream.
- See also
- Algorithm Details
- Parameters
-
[in] stream The stream where the operation will be queued in. - Must not be NULL.
- Stream must have enabled the backends that will execute the algorithm.
[in] backend Backend that will execute the algorithm. - Valid values:
- Backend must be enabled in current context.
[in] inDetections Array of AprilTag detections. - Must not be NULL.
- It must have type VPI_ARRAY_TYPE_APRILTAG_DETECTION.
- Array must have enabled the backends that will execute the algorithm.
[in] intrinsics Camera intrinsics [in] tagSize Tag edge length - Must be > 0
[out] outPoses Array that will receive the pose estimations. Array size will be set to same as inDetections. - Must not be NULL.
- It must have type VPI_ARRAY_TYPE_POSE.
- Array must have enabled the backends that will execute the algorithm.
- Capacity must be equal or greater than size of inDetections.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT streamis NULL.VPI_ERROR_INVALID_ARGUMENT inDetectionsoroutPosesis NULL.VPI_ERROR_NOT_IMPLEMENTED Algorithm does not support the given backend. VPI_ERROR_INVALID_OPERATION Backend hardware not available. VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in stream,inDetectionsoroutPoses.VPI_SUCCESS Operation executed successfully.