Overview
AprilTags are fiducial markers designed for visual detection and localization. VPI supports detection and pose estimation of a number of common tag families, and may be used as a drop-in replacement for the reference detection algorithm.
For more information, refer to the landing page for AprilTags at April Robotics.
| Input | Detection output |
|---|---|
 | 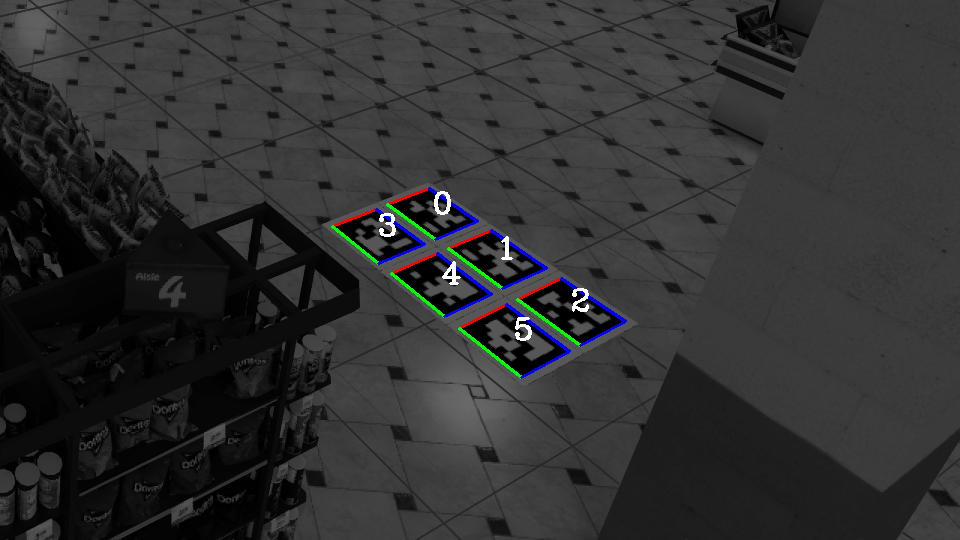 |
Implementation
Detector
Implementation of the detector is divided into the following stages:
| Stage | Description | Backends |
|---|---|---|
| Decimation | Input is decimated by a factor of 2 | PVA/CPU |
| Adaptive thresholding | Decide whether pixels are black or white in the decimated image | PVA/CPU |
| Connected component labeling | Assign unique IDs to contiguous regions of black/white pixels | PVA/CPU |
| Gradient cluster generation | Cluster all the coordinates which lie on the edge between a given black/white region pair | PVA/CPU |
| Quad fitting | Attempt to fit quadrilaterals to each gradient cluster | CPU |
| Decoding | Attempt to decode each quadrilateral as an AprilTag | CPU |
When choosing VPI_BACKEND_PVA, VPI will use PVA for the stages which support this backend and fall back to CPU for the remainder. The VPIStream and input/output buffers should be created with support for both PVA and CPU.
Pose estimator
In general, there are eight mathematical solutions to 3D pose estimation from homography decomposition [1]. Of these eight, only two of these are valid subject to the constraints that (1) the camera is in front of the tag and (2) the camera is facing the tag.
The pose estimator attempts to estimate both of these pose candidates via SVD followed by a fixed number of iterations which minimize corner reprojection error. If both pose candidates are valid, the estimator returns the pose which results in the least corner reprojection error.
See Also
C API functions
For list of limitations, constraints and backends that implements the algorithm, consult reference documentation of the following functions:
| Function | Description |
|---|---|
| vpiInitAprilTagDecodeParams | Initializes VPIAprilTagDecodeParams with default values. |
| vpiCreateAprilTagDetector | Creates a AprilTag detector payload. |
| vpiSubmitAprilTagDetector | Submits a AprilTag detector operation to the stream. |
| vpiSubmitAprilTagPoseEstimation | Submits a AprilTag pose estimation operation to the stream. |
Usage
Language:- Initialization phase:
- Include the header that defines AprilTags functions: #include <vpi/algo/AprilTags.h>Declares functions that implement AprilTag detection and pose estimation.
- Define the required input image: VPIImage input = /*...*/;
- Define the payload to process input image with provided width and height: int32_t w, h;vpiImageGetSize(input, &w, &h);VPIPayload payload;const int maxHamming = 1;VPIAprilTagDecodeParams params = {NULL, 0, maxHamming, family};vpiCreateAprilTagDetector(VPI_BACKEND_CPU, w, h, ¶ms, &payload);VPIStatus vpiCreateAprilTagDetector(uint64_t backends, int32_t inputWidth, int32_t inputHeight, VPIAprilTagDecodeParams const *params, VPIPayload *payload)Creates a AprilTag detector payload.VPIStatus vpiImageGetSize(VPIImage img, int32_t *width, int32_t *height)Get the image dimensions in pixels.
- Define the output arrays: const int maxDetections = 64;VPIArray detections;VPIArray poses;VPIStatus vpiArrayCreate(int32_t capacity, VPIArrayType type, uint64_t flags, VPIArray *array)Create an empty array instance.
- Create the stream to which the algorithm is to be submitted for execution: VPIStream stream;vpiStreamCreate(0, &stream);VPIStatus vpiStreamCreate(uint64_t flags, VPIStream *stream)Create a stream instance.
- Include the header that defines AprilTags functions:
- Processing phase:
- Submit the detector: vpiSubmitAprilTagDetector(stream, VPI_BACKEND_CPU, payload, maxDetections, input, detections);VPIStatus vpiSubmitAprilTagDetector(VPIStream stream, uint64_t backend, VPIPayload payload, uint32_t maxDetections, VPIImage input, VPIArray outDetections)Submits a AprilTag detector operation to the stream.
- Submit the pose estimator: const VPICameraIntrinsic intrinsics = {{w / 3.5f, 0.0f, w / 2.f}, {0.0f, h / 3.6f, h / 2.f}};const float tagSize = 0.2f;vpiSubmitAprilTagPoseEstimation(stream, VPI_BACKEND_CPU, detections, intrinsics, tagSize, poses);VPIStatus vpiSubmitAprilTagPoseEstimation(VPIStream stream, uint64_t backend, VPIArray inDetections, const VPICameraIntrinsic intrinsics, float tagSize, VPIArray outPoses)Submits a AprilTag pose estimation operation to the stream.
- Wait until the processing is done: vpiStreamSync(stream);VPIStatus vpiStreamSync(VPIStream stream)Blocks the calling thread until all submitted commands in this stream queue are done (queue is empty)...
- Submit the detector:
- Cleanup phase:
- Free resources held by the stream, the payload, the input image and the output arrays: vpiStreamDestroy(stream);vpiImageDestroy(input);vpiArrayDestroy(detections);vpiArrayDestroy(poses);vpiPayloadDestroy(payload);void vpiPayloadDestroy(VPIPayload payload)Deallocates the payload object and all associated resources.void vpiStreamDestroy(VPIStream stream)Destroy a stream instance and deallocate all HW resources.
- Free resources held by the stream, the payload, the input image and the output arrays:
Performance
For information on how to use the performance tables below, see Algorithm Performance Tables.
Before comparing measurements, consult Comparing Algorithm Elapsed Times.
For further information on how performance was benchmarked, see Performance Benchmark.