Estimate the transform between source and target keypoints. More...
Data Structures | |
| struct | VPIConstrainedHomography2DConfig |
| Holds the configuration of a constrained 2d homography transform. More... | |
| union | VPITransformConfig |
| Transformation parameters. More... | |
| struct | VPITransformEstimatorParams |
| Parameters used to tune Transform Estimator algorithm. More... | |
Enumerations | |
| enum | VPITransformType |
| Types of transformation supported. More... | |
| enum | VPITransfomEstimationMethod |
| Transform estimation method. More... | |
Functions | |
| VPIStatus | vpiCreateTransformEstimator (uint64_t backends, int32_t maxKeypoints, VPIPayload *payload) |
| Creates payload for vpiSubmitTransformEstimator. More... | |
| VPIStatus | vpiInitTransformEstimatorParams (VPITransformType type, VPITransformEstimatorParams *params) |
| Initializes the VPITransformEstimatorParams with default values for a given transform type. More... | |
| VPIStatus | vpiSubmitTransformEstimator (VPIStream stream, uint64_t backend, VPIPayload payload, VPIArray srcKeypoints, VPIArray tgtKeypoints, VPIArray matches, VPIArray outTransform, VPIArray outInliers, const VPITransformEstimatorParams *params) |
| Submits a Transform Estimator operation to the stream. More... | |
Detailed Description
Estimate the transform between source and target keypoints.
Refer to Transform Estimator for more details and usage examples.
Data Structure Documentation
◆ VPIConstrainedHomography2DConfig
| struct VPIConstrainedHomography2DConfig |
Holds the configuration of a constrained 2d homography transform.
Definition at line 105 of file TransformEstimator.h.
 Collaboration diagram for VPIConstrainedHomography2DConfig:
Collaboration diagram for VPIConstrainedHomography2DConfig:
◆ VPITransformConfig
| union VPITransformConfig |
Transformation parameters.
Definition at line 179 of file TransformEstimator.h.
Collaboration diagram for VPITransformConfig: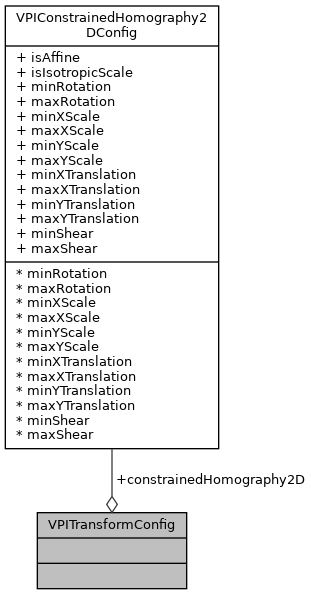
| Data Fields | ||
|---|---|---|
| VPIConstrainedHomography2DConfig | constrainedHomography2D | |
◆ VPITransformEstimatorParams
| struct VPITransformEstimatorParams |
Parameters used to tune Transform Estimator algorithm.
Definition at line 194 of file TransformEstimator.h.
Collaboration diagram for VPITransformEstimatorParams: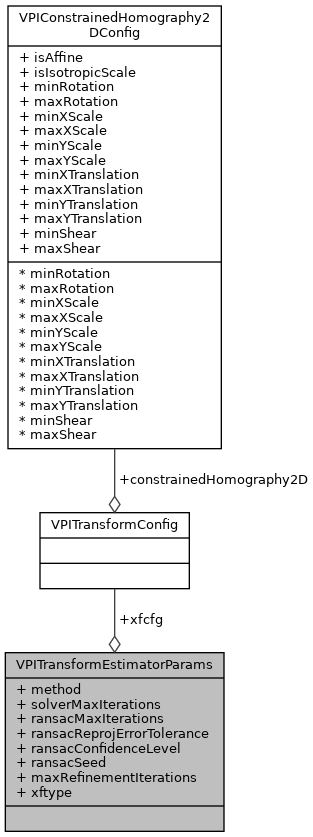
| Data Fields | ||
|---|---|---|
| VPITransfomEstimationMethod | method | Method to use for transform estimation. |
| int32_t | solverMaxIterations | Maximum number of iterations the non-linear solver should take. |
| int32_t | ransacMaxIterations | Maximum number of RANSAC iterations. |
| float | ransacReprojErrorTolerance | Maximum allowed reprojection error for a point to be treated as an inlier. |
| float | ransacConfidenceLevel | Maximum allowed reprojection error for a point to be treated as an inlier. |
| int32_t | ransacSeed | Random number seed to be used. |
| int32_t | maxRefinementIterations |
Maximum number of iterations for model refinement step. Pass 0 to skip refinement. It's usually needed when transform isn't affine. |
| VPITransformType | xftype | Type of transform to estimate. |
| VPITransformConfig | xfcfg | Transform configuration, such as trusted boundaries, etc. |
Enumeration Type Documentation
◆ VPITransformType
| enum VPITransformType |
#include <vpi/algo/TransformEstimator.h>
Types of transformation supported.
| Enumerator | |
|---|---|
| VPI_XFORM_CONSTRAINED_HOMOGRAPHY_2D | Represents a constrained 2D homography transform. |
Definition at line 172 of file TransformEstimator.h.
◆ VPITransfomEstimationMethod
#include <vpi/algo/TransformEstimator.h>
Transform estimation method.
| Enumerator | |
|---|---|
| VPI_XFORM_ESTIM_METHOD_REGULAR | Use least squares minimization method. |
| VPI_XFORM_ESTIM_METHOD_RANSAC | Use robust estimation with RANSAC and least squares. |
Definition at line 185 of file TransformEstimator.h.
Function Documentation
◆ vpiCreateTransformEstimator()
| VPIStatus vpiCreateTransformEstimator | ( | uint64_t | backends, |
| int32_t | maxKeypoints, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/TransformEstimator.h>
Creates payload for vpiSubmitTransformEstimator.
- See also
- Algorithm Details
- Parameters
-
[in] backends VPI backend that will execute the algorithm. - Valid values:
- Backend must be enabled in current context.
[in] maxKeypoints Maximum number of keypoints processed. - Must be > 0.
[out] payload Pointer to the payload variable that receives the created handle.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT payloadis NULL.VPI_ERROR_INVALID_ARGUMENT maxKeypintsoutside valid range.VPI_ERROR_INVALID_ARGUMENT backendrefers to an invalid backend.VPI_ERROR_NOT_IMPLEMENTED Transform Estimator algorithm is not supported by given backend. VPI_ERROR_INVALID_CONTEXT Current context was destroyed. VPI_ERROR_INVALID_OPERATION Backend isn't enabled in current context. VPI_ERROR_OUT_OF_MEMORY Cannot allocate required resources. VPI_SUCCESS Operation executed successfully.
◆ vpiInitTransformEstimatorParams()
| VPIStatus vpiInitTransformEstimatorParams | ( | VPITransformType | type, |
| VPITransformEstimatorParams * | params | ||
| ) |
#include <vpi/algo/TransformEstimator.h>
Initializes the VPITransformEstimatorParams with default values for a given transform type.
The default values remove all parameter constraints. It sets the following parameters:
- method: VPI_XFORM_ESTIM_METHOD_RANSAC
- ransacMaxIterations: 2000
- ransacReprojErrorTolerance: 3
- ransacConfidenceLevel: 0.95
- ransacSeed: 0
- solverMaxIterations: 50
- solverReprojErrorTolerance: 1e-6
- solverParameterTolerance: 1e-8
- maxRefinementIterations: 10
- xftype: (type passed) If xftype == VPI_XFORM_CONSTRAINED_HOMOGRAPHY_2D:
- xfcfg.constrainedHomography2D.minRotation: -FLT_MAX
- xfcfg.constrainedHomography2D.maxRotation: +FLT_MAX
- xfcfg.constrainedHomography2D.minXScale: 0
- xfcfg.constrainedHomography2D.maxXScale: 0
- xfcfg.constrainedHomography2D.minYScale: 0
- xfcfg.constrainedHomography2D.maxYScale: 0
- xfcfg.constrainedHomography2D.minXTranslation: -FLT_MAX
- xfcfg.constrainedHomography2D.maxXTranslation: FLT_MAX
- xfcfg.constrainedHomography2D.minYTranslation: -FLT_MAX
- xfcfg.constrainedHomography2D.maxYTranslation: FLT_MAX
- xfcfg.constrainedHomography2D.isAffine: 0
- xfcfg.constrainedHomography2D.isIsotropicScale: 0
- See also
- Algorithm Details
- Parameters
-
[in] type Type of transform to initialize the structure to. - Accepted types:
[in,out] params Pointer to structure to be initialized. - Must not be NULL.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT paramsis NULL.VPI_ERROR_INVALID_ARGUMENT Transform type not accepted. VPI_SUCCESS Operation executed successfully.
◆ vpiSubmitTransformEstimator()
| VPIStatus vpiSubmitTransformEstimator | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| VPIArray | srcKeypoints, | ||
| VPIArray | tgtKeypoints, | ||
| VPIArray | matches, | ||
| VPIArray | outTransform, | ||
| VPIArray | outInliers, | ||
| const VPITransformEstimatorParams * | params | ||
| ) |
#include <vpi/algo/TransformEstimator.h>
Submits a Transform Estimator operation to the stream.
- See also
- Algorithm Details
- Parameters
-
[in] stream The stream where the operation will be queued in. - Must not be NULL.
- Stream must have enabled the backends that will execute the algorithm.
[in] backend Backend that will execute the algorithm. - Must be the backend specified during payload creation or 0 as a shorthand to use this backend.
[in] payload Payload created with vpiCreateTransformEstimator. - Must not be NULL.
[in] srcKeypoints Source keypoints. It defines a set of keypoints to which the estimated transform is to be applied to. - Must not be NULL.
- Valid array types:
- If
matchesis not NULL,srcKeypointsandmatchesmust have the same size.
[in] tgtKeypoints Target keypoints. It defines a set of keypoints that are to be the result of applying the transform to the source keypoints. - Must not be NULL.
- Valid array types:
- If
matchesis NULL,srcKeypointsandtgtKeypointsmust have the same size. - If
matchesis not NULL, it must be guaranteed that the first element of VPIMatches::refIndex exists intgtKeypoints.
[in] matches Correspondence between source and target keypoints. If not NULL, for each i-th element in matches, the correspondence is given by: - src = srcKeypoints[i]
- tgt = tgtKeypoints[matches[i].refIndex[0]] If it's NULL, for each i-th element in srcKeypoints, the correspondence is given by:
- src = srcKeypoints[i]
- tgt = tgtKeypoints[i]
- If not NULL, it must have type VPI_ARRAY_TYPE_MATCHES.
[out] outTransform Where the estimated transformation will be written to. Array's type specify what transform is to be estimated. - Must not be NULL.
- Capacity must be >= 1.
- Array type must be VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D.
[out] outInliers Indices of the inlier matches. Optional, if not needed pass NULL. - Capacity must be >= number of keypoints in srcKeypoints.
- The array type must be VPI_ARRAY_TYPE_U32
[in] params Parameters specifying the parameters of the transform to be estimated. If NULL, will perform an unconstrained estimation for the transform given by the output transform array type. If not NULL, the following restrictions apply: - Transform type must be consistent with output transform array type:
Transform Type Output transform array type VPI_XFORM_CONSTRAINED_HOMOGRAPHY_2D VPI_ARRAY_TYPE_HOMOGRAPHY_TRANSFORM_2D
- Return values
-
VPI_ERROR_INVALID_ARGUMENT streamis NULL.VPI_ERROR_INVALID_ARGUMENT payloadis NULL.VPI_ERROR_INVALID_ARGUMENT srcKeypointsortgtKeypointsare NULL.VPI_ERROR_INVALID_ARGUMENT outTransformis NULL.VPI_ERROR_INVALID_ARGUMENT backendis invalid or unknown.VPI_ERROR_INVALID_ARGUMENT srcKeypoints,tgtKeypointsaren't consistent.VPI_ERROR_INVALID_ARGUMENT Transform type not consistent with output transform array type. VPI_ERROR_INVALID_ARRAY_TYPE Array type of srcKeypoints,tgtKeypoints,matchesoroutInliersis not correct.VPI_ERROR_NOT_IMPLEMENTED Transform Estimator algorithm is not supported by given backend. VPI_ERROR_INVALID_OPERATION Backend hardware not available. VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in stream,srcKeypoints,tgtKeypointsormatches.VPI_SUCCESS Operation executed successfully.