

Create a Condition
In most cases, applications will be built using one of several provided conditions documented in the condition components section of this user guide. This page illustrates the advanced use case of adding a user-defined condition to control when an operator can execute.
C++ Conditions
When assembling a C++ application, two types of conditions can be used:
- Native C++ conditions: custom conditions defined in C++ without using the GXF API, by creating a subclass of
holoscan::Condition. - GXF Conditions: conditions defined in the underlying C++ library by inheriting from the holoscan::ops::GXFCondition (
holoscan::GXFCondition) class. These conditions wrap GXF scheduling term components from GXF extensions. Examples areholoscan::CountConditionfor limiting operator execution to a specified count andholoscan::PeriodicConditionfor restricting the rate of execution of an operator to a specified period. Several additional built-in conditions are documented in the condition components section.
It is possible to assign a mixture of GXF conditions and native conditions to an operator.
Native Conditions
Understanding operator scheduling
C++
Python
The holoscan::SchedulingStatusType enum defines the current status of the condition.
The overall readiness of an operator to execute will be determined by AND combination of the status of all of the individual conditions present on an operator. In other words, the operator will only be able to execute once all conditions are in a kReady state. If any condition is in kNever state, the operator will never execute again.
When multiple operators are ready to execute at the same time, the order in which they execute will depend on the specific holoscan::Scheduler being used by the application. For example, the holoscan::GreedyScheduler executes one operator at a time in a fixed, deterministic order while the holoscan::EventBasedScheduler and holoscan::MultiThreadScheduler can have multiple worker threads that allow operators to execute in parallel.
When using kWaitEvent / WAIT_EVENT, your condition must call notify_scheduler() (C++ (holoscan::Condition::notify_scheduler)/Python (holoscan.core.Condition.notify_scheduler)) when the asynchronous event completes to wake the scheduler. This is the mechanism used by CudaStreamCondition and AsynchronousCondition. See the Event Based Conditions section below for details on implementing event-based conditions.
Creating a custom condition (C++)
When creating a native Condition (C++ (holoscan::Condition)/Python (holoscan.core.Condition)), one will typically need to override the following base component class methods
initialize(C++ (holoscan::Condition::initialize)/Python (holoscan.core.Condition.initialize)) is called once during initialization after the applicationsrun(C++ (holoscan::Application::run)/Python (holoscan.core.Application.run)) method is called. This can be used to setup any initial status for the member variables defined for the condition. It is important that this method call the baseinitialize(C++ (holoscan::Condition::initialize)/Python (holoscan.core.Condition.initialize)) method prior to using any parameters defined bysetup(C++ (holoscan::Condition::setup)/Python (holoscan.core.Condition.setup)).setup(C++ (holoscan::Condition::setup)/Python (holoscan.core.Condition.setup)) This method is used to configure any parameters defined for the condition. This method will be called automatically by theApplication(C++ (holoscan::Application)/Python (holoscan.core.Application)) class when itsrun(C++ (holoscan::Application::run)/Python (holoscan.core.Application.run)) method is called.
It is also required to override the following three methods that will be used by the underlying GXF scheduler. Of these, the check method is the only one that is always required to have a non-empty implementation.
check(C++ (holoscan::Condition::check)/Python (holoscan.core.Condition.check)) is called by the underlying GXF scheduler in order to check whether the operator to which this condition is assigned is ready to execute. The operator will only execute when this check sets thetypeoutput argument toholoscan::SchedulingStatusType::kReady(C++) /holoscan.core.SchedulingStatusType.READY(Python).on_execute(C++ (holoscan::Condition::on_execute)/Python (holoscan.core.Condition.on_execute)) is called immediately after an operator’scomputemethod (C++ (holoscan::Operator::compute)/Python (holoscan.core.Operator.compute)), just before any emitted messages are actually distributed to downstream receivers.update_state(C++ (holoscan::Condition::update_state)/Python (holoscan.core.Condition.update_state)) is always called immediately beforecheck(C++ (holoscan::Condition::check)/Python (holoscan.core.Condition.check)) and is always passed the current timestamp as an input argument. This is used by operator whose status depends on the current timestamp.
To create a custom condition in C++, it is necessary to create a subclass of
Condition (C++ (holoscan::Condition)/Python (holoscan.core.Condition)). The following example demonstrates how to use native conditions (conditions that do not have an underlying, pre-compiled GXF SchedulingTerm).
C++
Python
Code Snippet: examples/conditions/native/cpp/ping_periodic_native.cpp
In this application, two operators are created: PingTxOp (C++ (holoscan::Operators::PingTxOp) / Python (holoscan.operators.PingRxOp)).
- The
txoperator is a source operator that emits an integer value each time it is evoked. - The
rxoperator is a sink operator that receives one value from thetxoperator.
One custom condition, NativePeriodicCondition is created by inheriting from the Condition (C++ (holoscan::Condition)/Python (holoscan.core.Condition)) class. This condition is a simplified version of the provided PeriodicCondition (C++ (holoscan::PeriodicCondition)/Python (holoscan.conditions.PeriodicCondition)) (it does not implement the policy argument and only accepts an integer valued recess_period). We only create this condition to have a simple case to illustrate how a custom condition can be created.
The setup method of NativePeriodicCondition defines a single parameter named “recess_period”, which represents the amount of time in nanoseconds that an operator will have to wait after executing before it can execute again.
In defining the initialize method, note that we start by calling initialize (C++ (holoscan::Condition::initialize)/Python (holoscan.core.Condition.initialize)) so that we can get the value for the built in “recess_period” parameter. This initialize method then sets the initial state of the private member variables for this operator.
The check method is implemented to set type to SchedulingStatusType::kReady (C++) / SchedulingStatusType.READY (Python) if the specified period has elapsed. Otherwise, it sets the target_timestamp and sets type to SchedulingStatusType::kWaitTime (C++) / SchedulingStatusType.WAIT_TIME (Python). In this case kWaitTime is used because we know specifically what the target timestamp is. Note that for other types of conditions, we may not know the specific time at which the condition will be satisfied. In such a case where a target timestamp isn’t known, one should instead set the status to kWait (C++) / WAIT (Python) and would not need to set target_timestamp. There is also a kWaitEvent (C++) / WAIT_EVENT (Python) state which can be used for event-based conditions where the target timestamp isn’t known in advance. Built-in conditions such as AsynchronousCondition and CudaStreamCondition use this status type. Finally, if we wanted to indicate that an operator would never execute again, we would return kNever (C++) / NEVER (Python) (a concrete example that uses never is the CountCondition (C++ (holoscan::CountCondition)/Python (holoscan.core.CountCondition)) which sets that state once the specified count has been reached).
The on_execute method sets the internal next_target_ timestamp to the timestamp passed in. Because the underlying GXF framework calls this method immediately after Operator::compute, this is setting the period waited by this condition to be from the time when the prior call to compute completed.
The update_state method was not needed for this operator. This method is always called immediately prior to check and sometimes conditions choose to call it from the on_execute method. It is intended to perform some update of the internal state of the condition based on the timestamp at the time it is called.
For the C++ API, we can construct a shared pointer to an instance of the condition using the make_condition method. That condition can then be passed to the make_operator method for the operator the condition will apply to (in this case PingTxOp). For the Python API, we instead directly pass the constructed NativePeriodicCondition as a positional argument to the tx operator.
Condition Evaluation Timing Diagram
To better understand when a condition’s check, update_state and on_execute methods would be called by the underlying GXF entity executor, please see the following diagram.
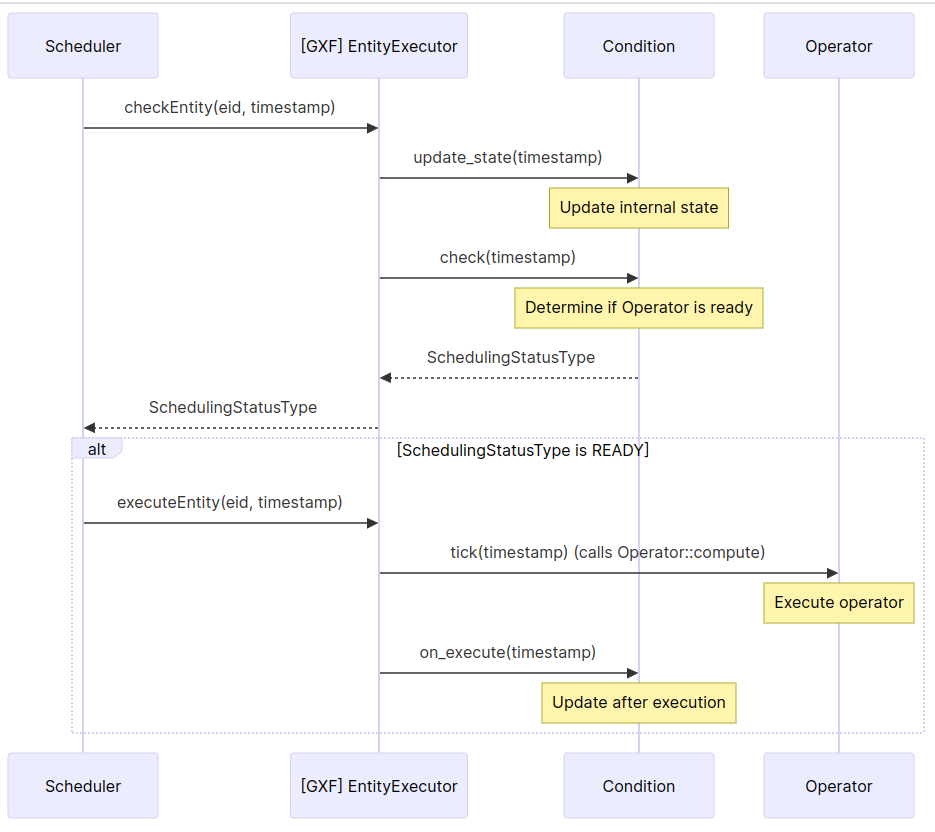
It can be seen that when checking if an operator is ready to execute the Condition::update_state method will be called immediately before Condition::check. If the check was successful (across the combination of all conditions on the operator), then the compute method would be called for that operator. The Condition::on_execute method is only called once compute completes.
Creating a custom condition involving transmitter or receiver queues
Some condition types depend on the state of the receiver or transmitter queues corresponding to an input or output port of an operator. This type of condition can also be created as a native condition. An illustration of this for an equivalent of MessageAvailableCondition is given in a second example. See C++: examples/conditions/native/cpp/message_available_native.cpp, Python: examples/conditions/native/python/message_available_native.py.
The primary additional consideration in designing such a message-based condition is how to retrieve the Receiver (C++ (holoscan::Receiver)/Python (holoscan.resources.Receiver)) or Transmitter (C++ (holoscan::Transmitter)/Python (holoscan.resources.Transmitter)) object for use in the native Condition’s methods.
C++
Python
In the case of a native C++ condition, a parameter of type Parameter<std::shared_ptr<holoscan::Receiver>> receiver_ should be defined as shown on lines 85-86 and 37-43. Methods to query the queue size can then be used as demonstrated for the check_min_size method on lines 80-83.
Alternatively, you can use the receiver() method inherited from Condition to retrieve a Receiver by port name in initialize(), similar to the Python example below.
Code Snippet: examples/conditions/native/cpp/message_available_native.cpp
Creating event-based conditions (kWaitEvent)
For conditions that wait on asynchronous events (such as CUDA stream completion or external callbacks), use the kWaitEvent / WAIT_EVENT status. This tells the scheduler that the condition will be satisfied at some unknown future time when an external event occurs.
Key requirements for event-based conditions:
- Return
kWaitEventfromcheck(): When waiting for an async event to complete - Call
notify_scheduler(): When the event completes, to wake the scheduler - Use atomic state variables: For thread-safe updates from async callbacks
- Reset state in
on_execute(): Prepare for the next scheduling cycle
The typical state machine pattern is:
For a complete, production-quality example of an event-based condition, see the CudaStreamCondition implementation in the SDK source code:
- Header:
include/holoscan/core/conditions/gxf/cuda_stream.hpp - Implementation:
src/core/conditions/gxf/cuda_stream.cpp
This condition demonstrates:
- Using
cudaLaunchHostFunc()to register callbacks on CUDA streams - Atomic state management with
std::atomic<State> - Proper use of
notify_scheduler()from the callback - Handling multiple streams and messages
For Python, the same pattern applies using threading.Lock for thread safety instead of atomics. See the C++ implementation as a reference for the overall structure.
The built-in holoscan::CudaStreamCondition uses this pattern with cudaLaunchHostFunc() to register a CUDA host callback that fires when GPU work on a stream completes. See the CUDA stream handling documentation for more details.
Override behavior for default Operator port conditions
The section on customizing input and output ports, explains that when a user adds a port without specifying any condition in Operator::setup, a default one is added. This default is a MessageAvailableCondition for input ports or a DownstreamMessageAffordableCondition for output ports).
If the user has supplied their own Condition to make_operator (C++) or as a positional argument to the operator constructor (Python) and that condition has a “receiver” or “transmitter” argument corresponding to an Operator port name, then a default condition should not be added to that port. This is done to avoid having multiple, potentially conflicting conditions on the same port. However, if the Operator::setup method explicitly specifies a condition via a call to IOSpec::condition, then that explicit condition would still be added to the port in addition to any other user-supplied one.
Creating Python bindings for a custom C++ condition
To expose a custom C++ condition to Python, it can be wrapped using pybind11 just like any other Condition class. For several examples, see the bindings for built-in conditions. The only difference for binding a custom condition vs. the examples in that folder is that custom conditions should use holoscan::Condition instead of holoscan::gxf::GXFCondition in the list of classes passed to the py::class_ call.