AR SDK Programming Guide
AR SDK Programming Guide
The AR SDK programming guide provides information about how to use the AR SDK in your applications and provides a list of the API references.
This section provides information about the NVIDIA® AR SDK API architecture.
1.1. Using the NVIDIA AR SDK in Applications
Use the AR SDK to enable an application to use the face tracking, facial landmark tracking, 3D face mesh tracking, and 3D Body Pose tracking features of the SDK.
1.2. Creating an Instance of a Feature Type
The feature type is a predefined structure that is used to access the SDK features. Each feature requires an instantiation of the feature type.
Creating an instance of a feature type provides access to configuration parameters that are used when loading an instance of the feature type and the input and output parameters that are provided at runtime when instances of the feature type are run.
- Allocate memory for an
NvAR_FeatureHandlestructure.NvAR_FeatureHandle faceDetectHandle{};
- Call the
NvAR_Create()function. In the call to the function, pass the following information:- A value of the
NvAR_FeatureIDenumeration to identify the feature type. - A pointer to the variable that you declared to allocate memory for an
NvAR_FeatureHandlestructure.
- A value of the
- To create an instance of the face detection feature type, run the following example:
NvAR_Create(NvAR_Feature_FaceDetection, &faceDetectHandle)
This function creates a handle to the feature instance, which is required in function calls to get and set the properties of the instance and to load, run, or destroy the instance.
1.3. Getting and Setting Properties for a Feature Type
To prepare to load and run an instance of a feature type, you need to set the properties that the instance requires.
Here are some of the properties:
- The configuration properties that are required to load the feature type.
- Input and output properties are provided at runtime when instances of the feature type are run.
Refer to Key Values in the Properties of a Feature Type for a complete list of properties.
To set properties, NVIDIA AR SDK provides type-safe set accessor functions. If you need the value of a property that has been set by a set accessor function, use the corresponding get accessor function. Refer to Summary of NVIDIA AR SDK Accessor Functions for a complete list of get and set functions.
1.3.1. Setting Up the CUDA Stream
Some SDK features require a CUDA stream in which to run. Refer to the NVIDIA CUDA Toolkit Documentation for more information.
- Initialize a CUDA stream by calling one of the following functions:
- The CUDA Runtime API function
cudaStreamCreate() -
NvAR_CudaStreamCreate()
You can use the second function to avoid linking with the NVIDIA CUDA Toolkit libraries.
- The CUDA Runtime API function
- Call the
NvAR_SetCudaStream()function and provide the following information as parameters:- The created filter handle.
Refer to Creating an Instance of a Feature Type for more information.
- The key value
NVAR_Parameter_Config(CUDAStream).Refer Key Values in the Properties of a Feature Type for more information.
- The CUDA stream that you created in the previous step.
This example sets up a CUDA stream that was created by calling the
NvAR_CudaStreamCreate()function:CUstream stream; nvErr = NvAR_CudaStreamCreate (&stream); nvErr = NvAR_SetCudaStream(featureHandle, NVAR_Parameter_Config(CUDAStream), stream);
- The created filter handle.
1.3.2. Summary of NVIDIA AR SDK Accessor Functions
The following table provides the details about the SDK accessor functions.
| Property Type | Data Type | Set and Get Accessor Function |
|---|---|---|
| 32-bit unsigned integer | unsigned int | NvAR_SetU32() |
| NvAR_GetU32() | ||
| 32-bit signed integer | int | NvAR_SetS32() |
| NvAR_GetS32() | ||
| Single-precision (32-bit) floating-point number | float | NvAR_SetF32() |
| NvAR_GetF32() | ||
| Double-precision (64-bit) floating point number | double | NvAR_SetF64() |
| NvAR_GetF64() | ||
| 64-bit unsigned integer | unsigned long long | NvAR_SetU64() |
| NvAR_GetU64() | ||
| Floating-point array | float* | NvAR_SetFloatArray() |
| NvAR_GetFloatArray() | ||
| Object | void* | NvAR_SetObject() |
| NvAR_GetObject() | ||
| Character string | const char* | NvAR_SetString() |
| NvAR_GetString() | ||
| CUDA stream | CUstream | NvAR_SetCudaStream() |
| NvAR_GetCudaStream() |
1.3.3. Key Values in the Properties of a Feature Type
The key values in the properties of a feature type identify the properties that can be used with each feature type. Each key has a string equivalent and is defined by a macro that indicates the category of the property and takes a name as an input to the macro.
Here are the macros that indicate the category of a property:
NvAR_Parameter_Configindicates a configuration property.Refer to Configuration Properties for more information.
NvAR_Parameter_Inputindicates an input property.Refer to Input Properties for more information.
NvAR_Parameter_Outputindicates an output property.Refer to Output Properties for more information.
The names are fixed keywords and are listed in nvAR_defs.h. The keywords might be reused with different macros, depending on whether a property is an input, an output, or a configuration property.
The property type denotes the accessor functions to set and get the property as listed in the Summary of NVIDIA AR SDK Accessor Functions table.
1.3.3.1. Configuration Properties
Here are the configuration properties in the AR SDK:
- NvAR_Parameter_Config(FeatureDescription)
-
A description of the feature type.
String equivalent:
NvAR_Parameter_Config_FeatureDescriptionProperty type: character string (
const char*) - NvAR_Parameter_Config(CUDAStream)
-
The CUDA stream in which to run the feature.
String equivalent:
NvAR_Parameter_Config_CUDAStreamProperty type: CUDA stream (
CUstream) - NvAR_Parameter_Config(ModelDir)
-
The path to the directory that contains the TensorRT model files that will be used to run inference for face detection or landmark detection, and the .nvf file that contains the 3D Face model, excluding the model file name. For details about the format of the .nvf file, Refer to NVIDIA 3DMM File Format.
String equivalent:
NvAR_Parameter_Config_ModelDirProperty type: character string (
const char*) - NvAR_Parameter_Config(BatchSize)
-
The number of inferences to be run at one time on the GPU.
String equivalent:
NvAR_Parameter_Config_BatchSizeProperty type:
unsigned integer - NvAR_Parameter_Config(Landmarks_Size)
-
The length of the output buffer that contains the X and Y coordinates in pixels of the detected landmarks. This property applies only to the landmark detection feature.
String equivalent:
NvAR_Parameter_Config_Landmarks_SizeProperty type:
unsigned integer - NvAR_Parameter_Config(LandmarksConfidence_Size)
-
The length of the output buffer that contains the confidence values of the detected landmarks. This property applies only to the landmark detection feature.
String equivalent:
NvAR_Parameter_Config_LandmarksConfidence_SizeProperty type:
unsigned integer - NvAR_Parameter_Config(Temporal)
-
Flag to enable optimization for temporal input frames. Enable the flag when the input is a video.
String equivalent:
NvAR_Parameter_Config_TemporalProperty type:
unsigned integer - NvAR_Parameter_Config(ShapeEigenValueCount)
-
The number of eigenvalues used to describe shape. In the supplied
face_model2.nvf, there are 100 shapes (also known as identity) eigenvalues, but theShapeEigenValueCountshould be queried when you allocate an array to receive the eigenvalues.String equivalent:
NvAR_Parameter_Config_ShapeEigenValueCountProperty type:
unsigned integer - NvAR_Parameter_Config(ExpressionCount)
-
The number of coefficients used to represent expression. In the supplied
face_model2.nvf, there are 53 expression blendshape coefficients, but theExpressionCountshould be queried when allocating an array to receive the coefficients.String equivalent:
NvAR_Parameter_Config_ExpressionCountProperty type:
unsigned integer - NvAR_Parameter_Config(UseCudaGraph)
-
Flag to enable CUDA Graph optimization. The CUDA graph reduces the overhead of GPU operation submission of 3D body tracking.
String equivalent:
NvAR_Parameter_Config_UseCudaGraphProperty type:
bool - NvAR_Parameter_Config(Mode)
-
Mode to select High Performance or High Quality for 3D Body Pose or Facial Landmark Detection.
String equivalent:
NvAR_Parameter_Config_ModeProperty type:
unsigned int - NvAR_Parameter_Config(ReferencePose)
-
CPU buffer of type NvAR_Point3f to hold the Reference Pose for Joint Rotations for 3D Body Pose.
String equivalent:
NvAR_Parameter_Config_ReferencePoseProperty type: object (
void*) - NvAR_Parameter_Config(TrackPeople) (Windows only)
-
Flag to select Multi-Person Tracking for 3D Body Pose Tracking.
String equivalent:
NvAR_Parameter_Config_TrackPeopleProperty type: object (
unsigned integer) - NvAR_Parameter_Config(ShadowTrackingAge)(Windows only)
-
The age after which the multi-person tracker no longer tracks the object in shadow mode. This property is measured in the number of frames.
Flag to select Multi-Person Tracking for 3D Body Pose Tracking.
String equivalent:
NvAR_Parameter_Config_ShadowTrackingAgeProperty type: object (
unsigned integer) - NvAR_Parameter_Config(ProbationAge)(Windows only)
-
The age after which the multi-person tracker marks the object valid and assigns an ID for tracking. This property is measured in the number of frames.
String equivalent:
NvAR_Parameter_Config_ProbationAgeProperty type: object (
unsigned integer) - NvAR_Parameter_Config(MaxTargetsTracked)(Windows only)
-
The maximum number of targets to be tracked by the multi-person tracker. After the new maximum target tracked limit is met, any new targets will be discarded.
String equivalent:
NvAR_Parameter_Config_MaxTargetsTrackedProperty type: object (
unsigned integer)
1.3.3.2. Input Properties
Here are the input properties in the AR SDK:
- NvAR_Parameter_Input(Image)
-
GPU input image buffer of type
NvCVImage.String equivalent:
NvAR_Parameter_Input_ImageProperty type: object (
void*) - NvAR_Parameter_Input(Width)
-
The width of the input image buffer in pixels.
String equivalent:
NvAR_Parameter_Input_WidthProperty type:
integer - NvAR_Parameter_Input(Height)
-
The height of the input image buffer in pixels.
String equivalent:
NvAR_Parameter_Input_HeightProperty type:
integer - NvAR_Parameter_Input(Landmarks)
-
CPU input array of type
NvAR_Point2fthat contains the facial landmark points.String equivalent:
NvAR_Parameter_Input_LandmarksProperty type: object (
void*) - NvAR_Parameter_Input(BoundingBoxes)
-
Bounding boxes that determine the region of interest (ROI) of an input image that contains a face of type
NvAR_BBoxes.String equivalent:
NvAR_Parameter_InputBoundingBoxesProperty type: object (
void*) - NvAR_Parameter_Input(FocalLength)
-
The focal length of the camera used for 3D Body Pose.
String equivalent:
NvAR_Parameter_Input_FocalLengthProperty type: object (
float)
1.3.3.3. Output Properties
Here are the output properties in the AR SDK:
- NvAR_Parameter_Output(BoundingBoxes)
-
CPU output bounding boxes of type NvAR_BBoxes.
String equivalent:
NvAR_Parameter_Output_BoundingBoxesProperty type: object (
void*) - NvAR_Parameter_Output(TrackingBoundingBoxes)(Windows only)
-
CPU output tracking bounding boxes of type NvAR_TrackingBBoxes.
String equivalent:
NvAR_Parameter_Output_TrackingBBoxesProperty type: object (
object (void*)) - NvAR_Parameter_Output(BoundingBoxesConfidence)
-
Float array of confidence values for each returned bounding box.
String equivalent:
NvAR_Parameter_Output_BoundingBoxesConfidenceProperty type: floating point array
- NvAR_Parameter_Output(Landmarks)
-
CPU output buffer of type
NvAR_Point2fto hold the output detected landmark key points. Refer to Facial point annotations for more information. The order of the points in the CPU buffer follows the order in MultiPIE 68-point markups, and the 126 points cover more points along the cheeks, the eyes, and the laugh lines.String equivalent:
NvAR_Parameter_Output_LandmarksProperty type: object (
void*) - NvAR_Parameter_Output(LandmarksConfidence)
-
Float array of confidence values for each detected landmark point.
String equivalent:
NvAR_Parameter_Output_LandmarksConfidenceProperty type: floating point array
- NvAR_Parameter_Output(Pose)
-
CPU array of type
NvAR_Quaternionto hold the output-detected pose as an XYZW quaternion.String equivalent:
NvAR_Parameter_Output_PoseProperty type: object (
void*) - NvAR_Parameter_Output(FaceMesh)
-
CPU 3D face Mesh of type
NvAR_FaceMesh.String equivalent:
NvAR_Parameter_Output_FaceMeshProperty type: object (
void*) - NvAR_Parameter_Output(RenderingParams)
-
CPU output structure of type
NvAR_RenderingParamsthat contains the rendering parameters that might be used to render the 3D face mesh.String equivalent:
NvAR_Parameter_Output_RenderingParamsProperty type: object (
void*) - NvAR_Parameter_Output(ShapeEigenValues)
-
Float array of shape eigenvalues. Get
NvAR_Parameter_Config(ShapeEigenValueCount)to determine how many eigenvalues there are.String equivalent:
NvAR_Parameter_Output_ShapeEigenValuesProperty type: const floating point array
- NvAR_Parameter_Output(ExpressionCoefficients)
-
Float array of expression coefficients. Get
NvAR_Parameter_Config(ExpressionCount)to determine how many coefficients there are.String equivalent:
NvAR_Parameter_Output_ExpressionCoefficientsProperty type: const floating point array
- NvAR_Parameter_Output(KeyPoints)
-
CPU output buffer of type
NvAR_Point2fto hold the output detected 2D Keypoints for Body Pose. Refer to 3D Body Pose Keypoint Format for information about the Keypoint names and the order of Keypoint output.String equivalent:
NvAR_Parameter_Output_KeyPointsProperty type: object (
void*) - NvAR_Parameter_Output(KeyPoints3D)
-
CPU output buffer of type
NvAR_Point3fto hold the output detected 3D Keypoints for Body Pose. Refer to 3D Body Pose Keypoint Format for information about the Keypoint names and the order of Keypoint output.String equivalent:
NvAR_Parameter_Output_KeyPoints3DProperty type: object (
void*) - NvAR_Parameter_Output(JointAngles)
-
CPU output buffer of type
NvAR_Point3fto hold the joint angles in axis-angle format for the Keypoints for Body Pose.String equivalent:
NvAR_Parameter_Output_JointAnglesProperty type: object (
void*) - NvAR_Parameter_Output(KeyPointsConfidence)
-
Float array of confidence values for each detected keypoints.
String equivalent:
NvAR_Parameter_Output_KeyPointsConfidenceProperty type: floating point array
- NvAR_Parameter_Output(OutputHeadTranslation)
-
Float array of three values that represent the x, y and z values of head translation with respect to the camera for Eye Contact.
String equivalent:
NvAR_Parameter_Output_OutputHeadTranslationProperty type: floating point array
- NvAR_Parameter_Output(OutputGazeVector)
-
Float array of two values that represent the yaw and pitch angles of the estimated gaze for Eye Contact.
String equivalent:
NvAR_Parameter_Output_OutputGazeVectorProperty type: floating point array
- NvAR_Parameter_Output(HeadPose)
-
CPU array of type NvAR_Quaternion to hold the output-detected head pose as an XYZW quaternion in Eye Contact. This is an alternative to the head pose that was obtained from the facial landmarks feature. This head pose is obtained using the PnP algorithm over the landmarks.
String equivalent:
NvAR_Parameter_Output_HeadPoseProperty type:
object (void*) - NvAR_Parameter_Output(GazeDirection)
-
Float array of two values that represent the yaw and pitch angles of the estimated gaze for Eye Contact.
String equivalent:
NvAR_Parameter_Output_GazeDirectionProperty type: floating point array
1.3.4. Getting the Value of a Property of a Feature
To get the value of a property of a feature, call the get accessor function that is appropriate for the data type of the property.
In the call to the function, pass the following information:
- The feature handle to the feature instance.
- The key value that identifies the property that you are getting.
- The location in memory where you want the value of the property to be written.
This example determines the length of the NvAR_Point2f output buffer that was returned by the landmark detection feature:
unsigned int OUTPUT_SIZE_KPTS;
NvAR_GetU32(landmarkDetectHandle, NvAR_Parameter_Config(Landmarks_Size), &OUTPUT_SIZE_KPTS);
1.3.5. Setting a Property for a Feature
The following steps explain how to set a property for a feature.
- Allocate memory for all inputs and outputs that are required by the feature and any other properties that might be required.
- Call the set accessor function that is appropriate for the data type of the property. In the call to the function, pass the following information:
- The feature handle to the feature instance.
- The key value that identifies the property that you are setting.
- A pointer to the value to which you want to set the property.
This example sets the file path to the file that contains the output 3D face model:
const char *modelPath = "file/path/to/model"; NvAR_SetString(landmarkDetectHandle, NvAR_Parameter_Config(ModelDir), modelPath);
This example sets up the input image buffer in GPU memory, which is required by the face detection feature:Note:It sets up an 8-bit chunky/interleaved BGR array.
NvCVImage InputImageBuffer; NvCVImage_Alloc(&inputImageBuffer, input_image_width, input_image_height, NVCV_BGR, NVCV_U8, NVCV_CHUNKY, NVCV_GPU, 1) ; NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Input(Image), &InputImageBuffer, sizeof(NvCVImage));
Refer to List of Properties for AR Features for more information about the properties and input and output requirements for each feature.
Note:The listed property name is the input to the macro that defines the key value for the property.
1.3.6. Loading a Feature Instance
You can load the feature after setting the configuration properties that are required to load an instance of a feature type.
To load a feature instance, call the NvAR_Load() function and specify the handle that was created for the feature instance when the instance was created. Refer to Creating an Instance of a Feature Type for more information.
This example loads an instance of the face detection feature type:
NvAR_Load(faceDetectHandle);
1.3.7. Running a Feature Instance
Before you can run the feature instance, load an instance of a feature type and set the user-allocated input and output memory buffers that are required when the feature instance is run.
To run a feature instance, call the NvAR_Run() function and specify the handle that was created for the feature instance when the instance was created. Refer to Creating an Instance of a Feature Type for more information.
This example shows how to run a face detection feature instance:
NvAR_Run(faceDetectHandle);
1.3.8. Destroying a Feature Instance
When a feature instance is no longer required, you need to destroy it to free the resources and memory that the feature instance allocated internally.
Memory buffers are provided as input and to hold the output of a feature and must be separately deallocated.
To destroy a feature instance, call the NvAR_Destroy() function and specify the handle that was created for the feature instance when the instance was created. Refer to Creating an Instance of a Feature Type for more information.
NvAR_Destroy(faceDetectHandle);
1.4. Working with Image Frames on GPU or CPU Buffers
Effect filters accept image buffers as NvCVImage objects. The image buffers can be CPU or GPU buffers, but for performance reasons, the effect filters require GPU buffers. The AR SDK provides functions for converting an image representation to NvCVImage and transferring images between CPU and GPU buffers.
For more information about NvCVImage, refer to NvCVImage API Guide. This section provides a synopsis of the most frequently used functions with the AR SDK.
1.4.1. Converting Image Representations to NvCVImage Objects
The AR SDK provides functions for converting OpenCV images and other image representations to NvCVImage objects. Each function places a wrapper around an existing buffer. The wrapper prevents the buffer from being freed when the destructor of the wrapper is called.
1.4.1.1. Converting OpenCV Images to NvCVImage Objects
You can use the wrapper functions that the AR SDK provides specifically for RGB OpenCV images.
The AR SDK provides wrapper functions only for RGB images. No wrapper functions are provided for YUV images.
- To create an
NvCVImageobject wrapper for an OpenCV image, use theNVWrapperForCVMat()function.//Allocate source and destination OpenCV images cv::Mat srcCVImg( ); cv::Mat dstCVImg(...); // Declare source and destination NvCVImage objects NvCVImage srcCPUImg; NvCVImage dstCPUImg; NVWrapperForCVMat(&srcCVImg, &srcCPUImg); NVWrapperForCVMat(&dstCVImg, &dstCPUImg);
- To create an OpenCV image wrapper for an
NvCVImageobject, use theCVWrapperForNvCVImage()function.// Allocate source and destination NvCVImage objects NvCVImage srcCPUImg(...); NvCVImage dstCPUImg(...); //Declare source and destination OpenCV images cv::Mat srcCVImg; cv::Mat dstCVImg; CVWrapperForNvCVImage (&srcCPUImg, &srcCVImg); CVWrapperForNvCVImage (&dstCPUImg, &dstCVImg);
1.4.1.2. Converting Other Image Representations to NvCVImage Objects
To convert other image representations, call the NvCVImage_Init() function to place a wrapper around an existing buffer (srcPixelBuffer).
NvCVImage src_gpu;
vfxErr = NvCVImage_Init(&src_gpu, 640, 480, 1920, srcPixelBuffer, NVCV_BGR, NVCV_U8, NVCV_INTERLEAVED, NVCV_GPU);
NvCVImage src_cpu;
vfxErr = NvCVImage_Init(&src_cpu, 640, 480, 1920, srcPixelBuffer, NVCV_BGR, NVCV_U8, NVCV_INTERLEAVED, NVCV_CPU);
1.4.1.3. Converting Decoded Frames from the NvDecoder to NvCVImage Objects
To convert decoded frames from the NVDecoder to NvCVImage objects, call the NvCVImage_Transfer() function to convert the decoded frame that is provided by the NvDecoder from the decoded pixel format to the format that is required by a feature of the AR SDK.
The following sample shows a decoded frame that was converted from the NV12 to the BGRA pixel format.
NvCVImage decoded_frame, BGRA_frame, stagingBuffer;
NvDecoder dec;
//Initialize decoder...
//Assuming dec.GetOutputFormat() == cudaVideoSurfaceFormat_NV12
//Initialize memory for decoded frame
NvCVImage_Init(&decoded_frame, dec.GetWidth(), dec.GetHeight(), dec.GetDeviceFramePitch(), NULL, NVCV_YUV420, NVCV_U8, NVCV_NV12, NVCV_GPU, 1);
decoded_frame.colorSpace = NVCV_709 | NVCV_VIDEO_RANGE | NVCV_CHROMA_COSITED;
//Allocate memory for BGRA frame, and set alpha opaque
NvCVImage_Alloc(&BGRA_frame, dec.GetWidth(), dec.GetHeight(), NVCV_BGRA, NVCV_U8, NVCV_CHUNKY, NVCV_GPU, 1);
cudaMemset(BGRA_frame.pixels, -1, BGRA_frame.pitch * BGRA_frame.height);
decoded_frame.pixels = (void*)dec.GetFrame();
//Convert from decoded frame format(NV12) to desired format(BGRA)
NvCVImage_Transfer(&decoded_frame, &BGRA_frame, 1.f, stream, & stagingBuffer);
The sample above assumes the typical colorspace specification for HD content. SD typically uses NVCV_601. There are eight possible combinations, and you should use the one that matches your video as described in the video header or proceed by trial and error.
Here is some additional information:
- If the colors are incorrect, swap 709<->601.
- If they are washed out or blown out, swap VIDEO<->FULL.
- If the colors are shifted horizontally, swap INTSTITIAL<->COSITED.
1.4.1.4. Converting an NvCVImage Object to a Buffer that can be Encoded by NvEncoder
To convert the NvCVImage to the pixel format that is used during encoding via NvEncoder, if necessary, call the NvCVImage_Transfer() function.
The following sample shows a frame that is encoded in the BGRA pixel format.
convert-nvcvimage-obj-buffer-encoded-nvencoderThe following sample shows a frame that is encoded in the BGRA pixel format.
//BGRA frame is 4-channel, u8 buffer residing on the GPU
NvCVImage BGRA_frame;
NvCVImage_Alloc(&BGRA_frame, dec.GetWidth(), dec.GetHeight(), NVCV_BGRA, NVCV_U8, NVCV_CHUNKY, NVCV_GPU, 1);
//Initialize encoder with a BGRA output pixel format
using NvEncCudaPtr = std::unique_ptr<NvEncoderCuda, std::function<void(NvEncoderCuda*)>>;
NvEncCudaPtr pEnc(new NvEncoderCuda(cuContext, dec.GetWidth(), dec.GetHeight(), NV_ENC_BUFFER_FORMAT_ARGB));
pEnc->CreateEncoder(&initializeParams);
//...
std::vector<std::vector<uint8_t>> vPacket;
//Get the address of the next input frame from the encoder
const NvEncInputFrame* encoderInputFrame = pEnc->GetNextInputFrame();
//Copy the pixel data from BGRA_frame into the input frame address obtained above
NvEncoderCuda::CopyToDeviceFrame(cuContext,
BGRA_frame.pixels,
BGRA_frame.pitch,
(CUdeviceptr)encoderInputFrame->inputPtr,
encoderInputFrame->pitch,
pEnc->GetEncodeWidth(),
pEnc->GetEncodeHeight(),
CU_MEMORYTYPE_DEVICE,
encoderInputFrame->bufferFormat,
encoderInputFrame->chromaOffsets,
encoderInputFrame->numChromaPlanes);
pEnc->EncodeFrame(vPacket);
1.4.2. Allocating an NvCVImage Object Buffer
You can allocate the buffer for an NvCVImage object by using theNvCVImage allocation constructor or image functions. In both options, the buffer is automatically freed by the destructor when the images go out of scope.
1.4.2.1. Using the NvCVImage Allocation Constructor to Allocate a Buffer
The NvCVImage allocation constructor creates an object to which memory has been allocated and that has been initialized. Refer to Allocation Constructor for more information.
The final three optional parameters of the allocation constructor determine the properties of the resulting NvCVImage object:
- The pixel organization determines whether blue, green, and red are in separate planes or interleaved.
- The memory type determines whether the buffer resides on the GPU or the CPU.
- The byte alignment determines the gap between consecutive scanlines.
The following examples show how to use the final three optional parameters of the allocation constructor to determine the properties of the NvCVImage object.
- This example creates an object without setting the final three optional parameters of the allocation constructor. In this object, the blue, green, and red components interleaved in each pixel, the buffer resides on the CPU, and the byte alignment is the default alignment.
NvCVImage cpuSrc( srcWidth, srcHeight, NVCV_BGR, NVCV_U8 );
- This example creates an object with identical pixel organization, memory type, and byte alignment to the previous example by setting the final three optional parameters explicitly. As in the previous example, the blue, green, and red components are interleaved in each pixel, the buffer resides on the CPU, and the byte alignment is the default, that is, optimized for maximum performance.
NvCVImage src( srcWidth, srcHeight, NVCV_BGR, NVCV_U8, NVCV_INTERLEAVED, NVCV_CPU, 0 );
- This example creates an object in which the blue, green, and red components are in separate planes, the buffer resides on the GPU, and the byte alignment ensures that no gap exists between one scanline and the next scanline.
NvCVImage gpuSrc( srcWidth, srcHeight, NVCV_BGR, NVCV_U8, NVCV_PLANAR, NVCV_GPU, 1 );
1.4.2.2. Using Image Functions to Allocate a Buffer
By declaring an empty image, you can defer buffer allocation.
- Declare an empty
NvCVImageobject.NvCVImage xfr;
- Allocate or reallocate the buffer for the image.
- To allocate the buffer, call the
NvCVImage_Alloc()function.Allocate a buffer this way when the image is part of a state structure, where you will not know the size of the image until later.
- To reallocate a buffer, call
NvCVImage_Realloc().This function checks for an allocated buffer and reshapes the buffer if it is big enough before freeing the buffer and calling
NvCVImage_Alloc().
- To allocate the buffer, call the
1.4.3. Transferring Images Between CPU and GPU Buffers
If the memory types of the input and output image buffers are different, an application can transfer images between CPU and GPU buffers.
1.4.3.1. Transferring Input Images from a CPU Buffer to a GPU Buffer
Here are the steps to transfer input images from a CPU buffer to a GPU buffer.
- Create an
NvCVImageobject to use as a staging GPU buffer that has the same dimensions and format as the source CPU buffer.NvCVImage srcGpuPlanar(inWidth, inHeight, NVCV_BGR, NVCV_F32, NVCV_PLANAR, NVCV_GPU,1)
- Create a staging buffer in one of the following ways:
- To avoid allocating memory in a video pipeline, create a GPU buffer that has the same dimensions and format as required for input to the video effect filter.
NvCVImage srcGpuStaging(inWidth, inHeight, srcCPUImg.pixelFormat, srcCPUImg.componentType, srcCPUImg.planar, NVCV_GPU)
- To simplify your application program code, declare an empty staging buffer.
NvCVImage srcGpuStaging;
An appropriate buffer will be allocated or reallocated as needed.
- To avoid allocating memory in a video pipeline, create a GPU buffer that has the same dimensions and format as required for input to the video effect filter.
- Call the
NvCVImage_Transfer()function to copy the source CPU buffer contents into the final GPU buffer via the staging GPU buffer.//Read the image into srcCPUImg NvCVImage_Transfer(&srcCPUImg, &srcGPUPlanar, 1.0f, stream, &srcGPUStaging)
1.4.3.2. Transferring Output Images from a GPU Buffer to a CPU Buffer
Here are the steps to transfer output images from a CPU buffer to a GPU buffer.
- Create an
NvCVImageobject to use as a staging GPU buffer that has the same dimensions and format as the destination CPU buffer.NvCVImage dstGpuPlanar(outWidth, outHeight, NVCV_BGR, NVCV_F32, NVCV_PLANAR, NVCV_GPU, 1)
For more information about
NvCVImage, refer to the NvCVImage API Guide. - Create a staging buffer in one of the following ways:
- To avoid allocating memory in a video pipeline, create a GPU buffer that has the same dimensions and format as the output of the video effect filter.
NvCVImage dstGpuStaging(outWidth, outHeight, dstCPUImg.pixelFormat, dstCPUImg.componentType, dstCPUImg.planar, NVCV_GPU)
- To simplify your application program code, declare an empty staging buffer:
NvCVImage dstGpuStaging;
An appropriately sized buffer will be allocated as needed.
- To avoid allocating memory in a video pipeline, create a GPU buffer that has the same dimensions and format as the output of the video effect filter.
- Call the
NvCVImage_Transfer()function to copy the GPU buffer contents into the destination CPU buffer via the staging GPU buffer.//Retrieve the image from the GPU to CPU, perhaps with conversion. NvCVImage_Transfer(&dstGpuPlanar, &dstCPUImg, 1.0f, stream, &dstGpuStaging);
1.5. List of Properties for the AR SDK Features
This section provides the properties and their values for the features in the AR SDK.
1.5.1. Face Detection and Tracking Property Values
The following tables list the values for the configuration, input, and output properties for Face Detection and Tracking.
| Property Name | Value |
|---|---|
FeatureDescription |
String is free-form text that describes the feature. The string is set by the SDK and cannot be modified by the user. |
CUDAStream |
The CUDA stream, which is set by the user. |
ModelDir |
String that contains the path to the folder that contains the TensorRT package files. Set by the user. |
Temporal |
Unsigned integer, 1/0 to enable/disable the temporal optimization of face detection. If enabled, only one face is returned. Refer to Face Detection and Tracking for more information. Set by the user. |
| Property Name | Value |
|---|---|
BoundingBoxes |
To be allocated by the user. |
BoundingBoxesConfidence |
An array of single-precision (32-bit) floating-point numbers that contain the confidence values for each detected face box. To be allocated by the user. |
1.5.2. Landmark Tracking Property Values
The following tables list the values for the configuration, input, and output properties for landmark tracking.
| Property Name | Value |
|---|---|
FeatureDescription |
String that describes the feature. |
CUDAStream |
The CUDA stream. Set by the user. |
ModelDir |
String that contains the path to the folder that contains the TensorRT package files. Set by the user. |
BatchSize |
The number of inferences to be run at one time on the GPU. The maximum value is 8. Temporal optimization of landmark detection is only supported for |
Landmarks_Size |
Unsigned integer, 68 or 126. Specifies the number of landmark points (X and Y values) to be returned. Set by the user. |
LandmarksConfidence_Size |
Unsigned integer, 68 or 126. Specifies the number of landmark confidence values for the detected keypoints to be returned. Set by the user. |
Temporal |
Unsigned integer, 1/0 to enable/disable the temporal optimization of landmark detection. If enabled, only one input bounding box is supported as the input. Refer to Landmark Detection and Tracking for more information. Set by the user. |
Mode |
(Optional) Unsigned integer. Set 0 to enable Performance mode (default) or 1 to enable Quality mode for Landmark detection. Set by the user. |
| Property Name | Value |
|---|---|
Image |
Interleaved (or chunky) 8-bit BGR input image in a CUDA buffer of type To be allocated and set by the user. |
BoundingBoxes |
If not specified as an input property, face detection is automatically run on the input image. Refer to Landmark Detection and Tracking for more information. To be allocated by the user. |
| Property Name | Value |
|---|---|
Landmarks |
To be allocated by the user. |
Pose |
The coordinate convention is followed as per OpenGL standards. For example, when seen from the camera, X is right, Y is up , and Z is back/towards the camera. To be allocated by the user. |
LandmarksConfidence |
An array of single-precision (32-bit) floating-point numbers, which must be large enough to hold the number of confidence values given by the product of the following:
To be allocated by the user. |
BoundingBoxes |
To be allocated by the user. |
1.5.3. Face 3D Mesh Tracking Property Values
The following tables list the values for the configuration, input, and output properties for Face 3D Mesh tracking.
| Property Name | Value |
|---|---|
FeatureDescription |
String that describes the feature. This property is read-only. |
ModelDir |
String that contains the path to the face model, and the TensorRT package files. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. Set by the user. |
CUDAStream |
(Optional) The CUDA stream. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. Set by the user. |
Temporal |
(Optional) Unsigned integer, 1/0 to enable/disable the temporal optimization of face and landmark detection. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. Set by the user. |
Mode |
(Optional) Unsigned integer. Set 0 to enable Performance mode (default) or 1 to enable Quality mode for Landmark detection. Set by the user. |
Landmarks_Size |
Unsigned integer, 68 or 126. If landmark detection is run internally, the confidence values for the detected key points are returned. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. |
ShapeEigenValueCount |
The number of eigenvalues that describe the identity shape. Query this to determine how big the eigenvalue array should be, if that is a desired output. This property is read-only. |
ExpressionCount |
The number of expressions available in the chosen model. Query this to determine how big the expression coefficient array should be, if that is the desired output. This property is read-only. |
VertexCount |
The number of vertices in the chosen model. Query this property to determine how big the vertex array should be, where This property is read-only. |
TriangleCount |
The number of triangles in the chosen model. Query this property to determine how big the triangle array should be, where This property is read-only. |
GazeMode |
Flag to toggle gaze mode. The default value is 0. If the value is 1, gaze estimation will be explicit. |
| Property Name | Value |
|---|---|
Width |
The width of the input image buffer that contains the face to which the face model will be fitted. Set by the user. |
Height |
The height of the input image buffer that contains the face to which the face model will be fitted. Set by the user. |
Landmarks |
An NvAR_Point2f array that contains the landmark points of size If landmarks are not provided to this feature, an input image must be provided. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. To be allocated by the user. |
Image |
An interleaved (or chunky) 8-bit BGR input image in a CUDA buffer of type If an input image is not provided as input, the landmark points must be provided to this feature as input. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. To be allocated by the user. |
| Property Name | Value |
|---|---|
FaceMesh |
To be allocated by the user. Query |
RenderingParams |
To be allocated by the user. |
Landmarks |
An Refer to Alternative Usage of the Face 3D Mesh Feature for more information. To be allocated by the user. |
Pose |
The coordinate convention is followed as per OpenGL standards. For example, when seen from the camera, X is right, Y is up , and Z is back/towards the camera. To be allocated by the user. |
LandmarksConfidence |
An array of single-precision (32-bit) floating-point numbers, which must be large enough to hold the number of confidence values of size To be allocated by the user. |
BoundingBoxes |
To be allocated by the user. |
BoundingBoxesConfidence |
An array of single-precision (32-bit) floating-point numbers that contain the confidence values for each detected face box. Refer to Alternative Usage of the Face 3D Mesh Feature for more information. To be allocated by the user. |
ShapeEigenValues |
Optional: The array into which the shape eigenvalues will be placed, if desired. Query To be allocated by the user. |
ExpressionCoefficients |
Optional: The array into which the expression coefficients will be placed, if desired. Query To be allocated by the user. The corresponding expression shapes for face_model2.nvf are in the following order:
|
1.5.4. Eye Contact Property Values
The following tables list the values for gaze redirection.
| Property Name | Value |
|---|---|
FeatureDescription |
String that describes the feature. |
CUDAStream |
The CUDA stream. Set by the user. |
ModelDir |
String that contains the path to the folder that contains the TensorRT package files. Set by the user. |
BatchSize |
The number of inferences to be run at one time on the GPU. The maximum value is 1. |
Landmarks_Size |
Unsigned integer, 68 or 126. Specifies the number of landmark points (X and Y values) to be returned. Set by the user. |
LandmarksConfidence_Size |
Unsigned integer, 68 or 126. Specifies the number of landmark confidence values for the detected keypoints to be returned. Set by the user. |
GazeRedirect |
Flag to enable or disable gaze redirection. When enabled, the gaze is estimated, and the redirected image is set as the output. When disabled, the gaze is estimated, but redirection does not occur. |
Temporal |
Unsigned integer and 1/0 to enable/disable the temporal optimization of landmark detection. Set by the user. |
DetectClosure |
Flag to toggle detection of eye closure and occlusion on/off. Default - ON |
EyeSizeSensitivity |
Unsigned integer in the range of 2-5 to increase the sensitivity of the algorithm to the redirected eye size. 2 uses a smaller eye region and 5 uses a larger eye size. |
UseCudaGraph |
Bool, True or False. Default is False Flag to use CUDA Graphs for optimization. Set by the user. |
| Property Name | Value |
|---|---|
Image |
Interleaved (or chunky) 8-bit BGR input image in a CUDA buffer of type To be allocated and set by the user. |
Width |
The width of the input image buffer that contains the face to which the face model will be fitted. Set by the user. |
Height |
The height of the input image buffer that contains the face to which the face model will be fitted. Set by the user. |
Landmarks |
Optional: An NvAR_Point2f array that contains the landmark points of size If landmarks are not provided to this feature, an input image must be provided. See Alternative Usage of the Face 3D Mesh Feature for more information. To be allocated by the user. |
| Property Name | Value |
|---|---|
Landmarks |
NvAR_Point2f array, which must be large enough to hold the number of points given by the product of the following:
To be allocated by the user. |
HeadPose |
(Optional) NvAR_Quaternion array, which must be large enough to hold the number of quaternions equal to NvAR_Parameter_Config(BatchSize). The OpenGL standards coordinate convention is used, which is when you look up from a camera, the coordinates are camera X - right, Y - up , and Z - back/towards the camera. To be allocated by the user. |
LandmarksConfidence |
Optional: An array of single-precision (32-bit) floating-point numbers, which must be large enough to hold the number of confidence values given by the product of the following:
To be allocated by the user. |
BoundingBoxes |
Optional: NvAR_BBoxes structure that contains the detected face through face detection performed by the landmark detection feature. Refer to Landmark Detection and Tracking for more information. To be allocated by the user. |
OutputGazeVector |
Float array, which must be large enough to hold two values (pitch and yaw) for the gaze angle in radians per image. For batch sizes larger than 1, it should hold To be allocated by the user. |
OutputHeadTranslation |
Optional: Float array, which must be large enough to hold the (x,y,z) head translations per image. For batch sizes larger than 1 it should hold To be allocated by the user. |
GazeDirection |
Each element contains two To be allocated by the user. |
1.5.5. Body Detection Property Values
The following tables list the values for the configuration, input, and output properties for Body Detection racking.
| Property Name | Name |
|---|---|
FeatureDescription |
String is free-form text that describes the feature. The string is set by the SDK and cannot be modified by the user. |
CUDAStream |
The CUDA stream, which is set by the user. |
ModelDir |
String that contains the path to the folder that contains the TensorRT package files. Set by the user. |
Temporal |
Unsigned integer, 1/0 to enable/disable the temporal optimization of Body Pose Tracking. Set by the user. |
| Property Name | Value |
|---|---|
BoundingBoxes |
To be allocated by the user. |
BoundingBoxesConfidence |
An array of single-precision (32-bit) floating-point numbers that contain the confidence values for each detected body box. To be allocated by the user. |
1.5.6. 3D Body Pose Keypoint Tracking Property Values
The following tables list the values for the configuration, input, and output properties for 3D Body Pose Keypoint Tracking racking.
| Property Name | Value |
|---|---|
FeatureDescription |
String that describes the feature. |
CUDAStream |
The CUDA stream. Set by the user. |
ModelDir |
String that contains the path to the folder that contains the TensorRT package files. Set by the user. |
BatchSize |
The number of inferences to be run at one time on the GPU. The maximum value is 1. |
Mode |
Unsigned integer, 0 or 1. Default is 1. Selects the High Performance (1) mode or High Quality (0) mode Set by the user. |
UseCudaGraph |
Bool, True or False. Default is True Flag to use CUDA Graphs for optimization. Set by the user. |
Temporal |
Unsigned integer and 1/0 to enable/disable the temporal optimization of Body Pose tracking. Set by the user. |
NumKeyPoints |
Unsigned integer. Specifies the number of keypoints available, which is currently 34. |
ReferencePose |
Specifies the Reference Pose used to compute the joint angles. |
TrackPeople |
Unsigned integer and 1/0 to enable/disable multi-person tracking in Body Pose. Set by the user. Available only on Windows. |
ShadowTrackingAge |
Unsigned integer. Specifies the period after which the multi-person tracker stops tracking the object in shadow mode. This value is measured in the number of frames. Set by the user, and the default value is 90. Available only on Windows. |
ProbationAge |
Unsigned integer. Specifies the period after which the multi-person tracker marks the object valid and assigns an ID for tracking. This value is measured in the number of frames. Set by the user, and the default value is 10. Available only on Windows. |
MaxTargetsTracked |
Unsigned integer. Specifies the maximum number of targets to be tracked by the multi-person tracker. After the tracking is complete, the new targets are discarded. Set by the user, and the default value is 30. Available only on Windows. |
| Property Name | Value |
|---|---|
Image |
Interleaved (or chunky) 8-bit BGR input image in a CUDA buffer of type To be allocated and set by the user. |
FocalLength |
Float. Default is 800.79041 Specifies the focal length of the camera to be used for 3D Body Pose. Set by the user. |
BoundingBoxes |
If not specified as an input property, body detection is automatically run on the input image. To be allocated by the user. |
1.5.7. Facial Expression Estimation Property Values
The following tables list the values for the configuration, input, and output properties for Facial Expression Estimation.
| Property Name | Value |
|---|---|
FeatureDescription |
String that describes the feature. This property is read-only. |
ModelDir |
String that contains the path to the folder that contains the TensorRT package files. Set by the user. |
CUDAStream |
(Optional) The CUDA stream. Set by the user. |
Temporal |
(Optional) Bitfield to control temporal filtering.
Set by the user. |
Landmarks_Size |
Unsigned integer, 68 or 126. Required array size of detected facial landmark points. To accommodate the {x,y} location of each of the detected points, the length of the array must be 126. |
ExpresionCount |
Unsigned integer. The number of expressions in the face model. |
PoseMode |
Determines how to compute pose. 0=3DOF implicit (default), 1=6DOF explicit. 6DOF (6 degrees of freedom) is required for 3D translation output. |
Mode |
Flag to toggle landmark mode. Set 0 to enable Performance model for landmark detection. Set 1 to enable Quality model for landmark detection for higher accuracy. Default - 1. |
EnableCheekPuff |
(Experimental) Enables cheek puff blendshapes |
| Property Name | Value |
|---|---|
Landmarks |
(Optional) An If landmarks are not provided to this feature, an input image must be provided. To be allocated by the user. |
Image |
(Optional) An interleaved (or chunky) 8-bit BGR input image in a CUDA buffer of type NvCVImage. If an input image is not provided as input, the landmark points must be provided to this feature as input. To be allocated by the user. |
CameraIntrinsicParams |
Optional: Camera intrinsic parameters. Three element float array with elements corresponding to focal length, cx, cy intrinsics respectively, of an ideal perspective camera. Any barrel or fisheye distortion should be removed or considered negligible. Only used if PoseMode = 1. |
| Property Name | Value |
|---|---|
Landmarks |
(Optional) An NvAR_Point2f array, which must be large enough to hold the number of points of size NvAR_Parameter_Config(Landmarks_Size). |
Pose |
(Optional) To be allocated by the user. |
PoseTranslation |
Optional: To be allocated by the user. |
LandmarksConfidence |
(Optional) An array of single-precision (32-bit) floating-point numbers, which must be large enough to hold the number of confidence values of size To be allocated by the user. |
BoundingBoxes |
(Optional) To be allocated by the user. |
BoundingBoxesConfidence |
(Optional) An array of single-precision (32-bit) floating-point numbers that contain the confidence values for each detected face box. To be allocated by the user. |
ExpressionCoefficients |
The array into which the expression coefficients will be placed, if desired. Query To be allocated by the user. The corresponding expression shapes are in the following order:
|
1.6. Using the AR Features
This section provides information about how to use the AR features.
1.6.1. Face Detection and Tracking
This section provides information about how to use the Face Detection and Tracking feature.
1.6.1.1. Face Detection for Static Frames (Images)
To obtain detected bounding boxes, you can explicitly instantiate and run the face detection feature as below, with the feature taking an image buffer as input.
This example runs the Face Detection AR feature with an input image buffer and output memory to hold bounding boxes:
//Set input image buffer
NvAR_SetObject(faceDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Set output memory for bounding boxes
NvAR_BBoxes = output_boxes{};
output_bboxes.boxes = new NvAR_Rect[25];
output_bboxes.max_boxes = 25;
NvAR_SetObject(faceDetectHandle, NvAR_Parameter_Output(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes));
//OPTIONAL – Set memory for bounding box confidence values if desired
NvAR_Run(faceDetectHandle);
1.6.1.2. Face Tracking for Temporal Frames (Videos)
If Temporal is enabled, for example when you process a video frame instead of an image, only one face is returned. The largest face appears for the first frame, and this face is subsequently tracked over the following frames.
However, explicitly calling the face detection feature is not the only way to obtain a bounding box that denotes detected faces. Refer to Landmark Detection and Tracking and Face 3D Mesh and Tracking for more information about how to use the Landmark Detection or Face3D Reconstruction AR features and return a face bounding box.
1.6.2. Landmark Detection and Tracking
This section provides information about how to use the Landmark Detection and Tracking feature.
1.6.2.1. Landmark Detection for Static Frames (Images)
Typically, the input to the landmark detection feature is an input image and a batch (up to 8) of bounding boxes. Currently, the maximum value is 1. These boxes denote the regions of the image that contain the faces on which you want to run landmark detection.
This example runs the Landmark Detection AR feature after obtaining bounding boxes from Face Detection:
//Set input image buffer
NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Pass output bounding boxes from face detection as an input on which //landmark detection is to be run
NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Input(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes));
//Set landmark detection mode: Performance[0] (Default) or Quality[1]
unsigned int mode = 0; // Choose performance mode
NvAR_SetU32(landmarkDetectHandle, NvAR_Parameter_Config(Mode), mode);
//Set output buffer to hold detected facial keypoints
std::vector<NvAR_Point2f> facial_landmarks;
facial_landmarks.assign(OUTPUT_SIZE_KPTS, {0.f, 0.f});
NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Output(Landmarks), facial_landmarks.data(),sizeof(NvAR_Point2f));
NvAR_Run(landmarkDetectHandle);
1.6.2.2. Alternative Usage of Landmark Detection
As described in the Configuration Properties for Landmark Tracking table in Landmark Tracking Property Values, the Landmark Detection AR feature supports some optional parameters that determine how the feature can be run.
If bounding boxes are not provided to the Landmark Detection AR feature as inputs, face detection is automatically run on the input image, and the largest face bounding box is selected on which to run landmark detection.
If BoundingBoxes is set as an output property, the property is populated with the selected bounding box that contains the face on which the landmark detection was run. Landmarks is not an optional property and, to explicitly run this feature, this property must be set with a provided output buffer.
1.6.2.3. Landmark Tracking for Temporal Frames (Videos)
Additionally, if Temporal is enabled for example when you process a video stream and face detection is run explicitly, only one bounding box is supported as an input for landmark detection.
When face detection is not explicitly run, by providing an input image instead of a bounding box, the largest detected face is automatically selected. The detected face and landmarks are then tracked as an optimization across temporally related frames.
The internally determined bounding box can be queried from this feature but is not required for the feature to run.
This example uses the Landmark Detection AR feature to obtain landmarks directly from the image, without first explicitly running Face Detection:
//Set input image buffer
NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Set output memory for landmarks
std::vector<NvAR_Point2f> facial_landmarks;
facial_landmarks.assign(batchSize * OUTPUT_SIZE_KPTS, {0.f, 0.f});
NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Output(Landmarks), facial_landmarks.data(),sizeof(NvAR_Point2f));
//Set landmark detection mode: Performance[0] (Default) or Quality[1]
unsigned int mode = 0; // Choose performance mode
NvAR_SetU32(landmarkDetectHandle, NvAR_Parameter_Config(Mode), mode);
//OPTIONAL – Set output memory for bounding box if desired
NvAr_BBoxes = output_boxes{};
output_bboxes.boxes = new NvAR_Rect[25];
output_bboxes.max_boxes = 25;
NvAR_SetObject(landmarkDetectHandle, NvAR_Parameter_Output(BoundingBoxes), &output_bboxes, sizeof(NvAr_BBoxes));
//OPTIONAL – Set output memory for pose, landmark confidence, or even bounding box confidence if desired
NvAR_Run(landmarkDetectHandle);
1.6.3. Face 3D Mesh and Tracking
This section provides information about how to use the Face 3D Mesh and Tracking feature.
1.6.3.1. Face 3D Mesh for Static Frames (Images)
Typically, the input to Face 3D Mesh feature is an input image and a set of detected landmark points corresponding to the face on which we want to run 3D reconstruction.
Here is the typical usage of this feature, where the detected facial keypoints from the Landmark Detection feature are passed as input to this feature:
//Set facial keypoints from Landmark Detection as an input
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Input(Landmarks), facial_landmarks.data(),sizeof(NvAR_Point2f));
//Set output memory for face mesh
NvAR_FaceMesh face_mesh = new NvAR_FaceMesh();
face_mesh->vertices = new NvAR_Vector3f[FACE_MODEL_NUM_VERTICES];
face_mesh->tvi = new NvAR_Vector3u16[FACE_MODEL_NUM_INDICES];
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Output(FaceMesh), face_mesh, sizeof(NvAR_FaceMesh));
//Set output memory for rendering parameters
NvAR_RenderingParams rendering_params = new NvAR_RenderingParams();
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Output(RenderingParams), rendering_params, sizeof(NvAR_RenderingParams));
NvAR_Run(faceFitHandle);
1.6.3.2. Alternative Usage of the Face 3D Mesh Feature
Similar to the alternative usage of the Landmark detection feature, the Face 3D Mesh AR feature can be used to determine the detected face bounding box, the facial keypoints, and a 3D face mesh and its rendering parameters.
Instead of the facial keypoints of a face, if an input image is provided, the face and the facial keypoints are automatically detected and used to run the face mesh fitting. When run this way, if BoundingBoxes and/or Landmarks are set as optional output properties for this feature, these properties will be populated with the bounding box that contains the face and the detected facial keypoints respectively.
FaceMesh and RenderingParams are not optional properties for this feature, and to run the feature, these properties must be set with user-provided output buffers.
Additionally, if this feature is run without providing facial keypoints as an input, the path pointed to by theModelDir config parameter must also contain the face and landmark detection TRT package files. Optionally, the CUDAStream and the Temporal flag can be set for those features.
1.6.3.3. Face 3D Mesh Tracking for Temporal Frames (Videos)
If the Temporal flag is set and face and landmark detection are run internally, these features will be optimized for temporally related frames
This means that face and facial keypoints will be tracked across frames, and only one bounding box will be returned, if requested, as an output. The Temporal flag is not supported by the Face 3D Mesh feature if Landmark Detection and/or Face Detection features are called explicitly. In that case, you will have to provide the flag directly to those features.
The facial keypoints and/or the face bounding box that were determined internally can be queried from this feature but are not required for the feature to run.
This example uses the Mesh Tracking AR feature to obtain the face mesh directly from the image, without explicitly running Landmark Detection or Face Detection:
//Set input image buffer instead of providing facial keypoints
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Set output memory for face mesh
NvAR_FaceMesh face_mesh = new NvAR_FaceMesh();
unsigned int n;
err = NvAR_GetU32(faceFitHandle, NvAR_Parameter_Config(VertexCount), &n);
face_mesh->num_vertices = n;
err = NvAR_GetU32(faceFitHandle, NvAR_Parameter_Config(TriangleCount), &n);
face_mesh->num_triangles = n;
face_mesh->vertices = new NvAR_Vector3f[face_mesh->num_vertices];
face_mesh->tvi = new NvAR_Vector3u16[face_mesh->num_triangles];
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Output(FaceMesh), face_mesh, sizeof(NvAR_FaceMesh));
//Set output memory for rendering parameters
NvAR_RenderingParams rendering_params = new NvAR_RenderingParams();
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Output(RenderingParams), rendering_params, sizeof(NvAR_RenderingParams));
//OPTIONAL - Set facial keypoints as an output
NvAR_SetObject(faceFitHandle, NvAR_Parameter_Output(Landmarks), facial_landmarks.data(),sizeof(NvAR_Point2f));
//OPTIONAL – Set output memory for bounding boxes, or other parameters, such as pose, bounding box/landmarks confidence, etc.
NvAR_Run(faceFitHandle);
1.6.4. Eye Contact
This feature estimates the gaze of a person from an eye patch that was extracted using landmarks and redirects the eyes to make the person look at the camera in a permissible range of eye and head angles.
The feature also supports a mode where the estimation can be obtained without redirection. The eye contact feature can be invoked by using the GazeRedirection feature ID. Eye contact feature has the following options:
- Gaze Estimation
- Gaze Redirection
In this release, gaze estimation and redirection of only one face in the frame is supported.
1.6.4.1. Gaze Estimation
The estimation of gaze requires face detection and landmarks as input. The inputs to the gaze estimator are an input image buffer and buffers to hold facial landmarks and confidence scores. The output of gaze estimation is the gaze vector (pitch, yaw) values in radians. A float array needs to be set as the output buffer to hold estimated gaze. The GazeRedirect parameter must be set to false.
This example runs the Gaze Estimation with an input image buffer and output memory to hold the estimated gaze vector:
bool bGazeRedirect=false
NvAR_SetU32(gazeRedirectHandle, NvAR_Parameter_Config(GazeRedirect), bGazeRedirect);
//Set input image buffer
NvAR_SetObject(gazeRedirectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Set output memory for gaze vector
float gaze_angles_vector[2];
NvvAR_SetF32Array(gazeRedirectHandle, NvAR_Parameter_Output(OutputGazeVector), gaze_angles_vector, batchSize * 2);
//OPTIONAL – Set output memory for landmarks, head pose, head translation and gaze direction if desired
std::vector<NvAR_Point2f> facial_landmarks;
facial_landmarks.assign(batchSize * OUTPUT_SIZE_KPTS, {0.f, 0.f});
NvAR_SetObject(gazeRedirectHandle, NvAR_Parameter_Output(Landmarks), facial_landmarks.data(),sizeof(NvAR_Point2f));
NvAR_Quaternion head_pose;
NvAR_SetObject(gazeRedirectHandle, NvAR_Parameter_Output(HeadPose), &head_pose, sizeof(NvAR_Quaternion));
float head_translation[3] = {0.f};
NvAR_SetF32Array(gazeRedirectHandle, NvAR_Parameter_Output(OutputHeadTranslation), head_translation,
batchSize * 3);
NvAR_Run(gazeRedirectHandle);
1.6.4.2. Gaze Redirection
Gaze redirection takes identical inputs as the gaze estimation. In addition to the outputs of gaze estimation, to store the gaze redirected image, an output image buffer of the same size as the input image buffer needs to be set.
The gaze will be redirected to look at the camera within a certain range of gaze angles and head poses. Outside this range, the feature disengages. Head pose, head translation, and gaze direction can be optionally set as outputs. The GazeRedirect parameter must be set to true.
bool bGazeRedirect=true;
NvAR_SetU32(gazeRedirectHandle, NvAR_Parameter_Config(GazeRedirect), bGazeRedirect);
//Set input image buffer
NvAR_SetObject(gazeRedirectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Set output memory for gaze vector
float gaze_angles_vector[2];
NvvAR_SetF32Array(gazeRedirectHandle, NvAR_Parameter_Output(OutputGazeVector), gaze_angles_vector, batchSize * 2);
//Set output image buffer
NvAR_SetObject(gazeRedirectHandle, NvAR_Parameter_Output(Image), &outputImageBuffer, sizeof(NvCVImage));
NvAR_Run(gazeRedirectHandle);
1.6.5. 3D Body Pose Tracking
This feature relies on temporal information to track the person in the scene, where the keypoints information from the previous frame is used to estimate the keypoints of the next frame.
3D Body Pose Tracking consists of the following parts:
- Body Detection
- 3D Keypoint Detection
In this release, we support only one person in the frame, and when the full body (head to toe) is visible. The feature will still work if a part of the body, such as an arm or a foot, is occluded/truncated.
1.6.5.1. 3D Body Pose Tracking for Static Frames (Images)
You can obtain the bounding boxes that encapsulate the people in the scene. To obtain detected bounding boxes, you can explicitly instantiate and run body detection as shown in the example below and pass the image buffer as input.
- This example runs the Body Detection with an input image buffer and output memory to hold bounding boxes:
//Set input image buffer NvAR_SetObject(bodyDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage)); //Set output memory for bounding boxes NvAR_BBoxes = output_boxes{}; output_bboxes.boxes = new NvAR_Rect[25]; output_bboxes.max_boxes = 25; NvAR_SetObject(bodyDetectHandle, NvAR_Parameter_Output(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes)); //OPTIONAL – Set memory for bounding box confidence values if desired NvAR_Run(bodyDetectHandle);
- The input to 3D Body Keypoint Detection is an input image. It outputs the 2D Keypoints, 3D Keypoints, Keypoints confidence scores, and bounding box encapsulating the person.
This example runs the 3D Body Pose Detection AR feature:
//Set input image buffer NvAR_SetObject(keypointDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage)); //Pass output bounding boxes from body detection as an input on which //landmark detection is to be run NvAR_SetObject(keypointDetectHandle, NvAR_Parameter_Input(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes)); //Set output buffer to hold detected keypoints std::vector<NvAR_Point2f> keypoints; std::vector<NvAR_Point3f> keypoints3D; std::vector<NvAR_Point3f> jointAngles; std::vector<float> keypoints_confidence; // Get the number of keypoints unsigned int numKeyPoints; NvAR_GetU32(keyPointDetectHandle, NvAR_Parameter_Config(NumKeyPoints), &numKeyPoints); keypoints.assign(batchSize * numKeyPoints , {0.f, 0.f}); keypoints3D.assign(batchSize * numKeyPoints , {0.f, 0.f, 0.f}); jointAngles.assign(batchSize * numKeyPoints , {0.f, 0.f, 0.f}); NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(KeyPoints), keypoints.data(), sizeof(NvAR_Point2f)); NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(KeyPoints3D), keypoints3D.data(), sizeof(NvAR_Point3f)); NvAR_SetF32Array(keyPointDetectHandle, NvAR_Parameter_Output(KeyPointsConfidence), keypoints_confidence.data(), batchSize * numKeyPoints); NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(JointAngles), jointAngles.data(), sizeof(NvAR_Point3f)); //Set output memory for bounding boxes NvAR_BBoxes = output_boxes{}; output_bboxes.boxes = new NvAR_Rect[25]; output_bboxes.max_boxes = 25; NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes)); NvAR_Run(keyPointDetectHandle);
1.6.5.2. 3D Body Pose Tracking for Temporal Frames (Videos)
The feature relies on temporal information to track the person in the scene. The keypoints information from the previous frame is used to estimate the keypoints of the next frame.
This example uses the 3D Body Pose Tracking AR feature to obtain 3D Body Pose Keypoints directly from the image:
//Set input image buffer
NvAR_SetObject(keypointDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Pass output bounding boxes from body detection as an input on which //landmark detection is to be run
NvAR_SetObject(keypointDetectHandle, NvAR_Parameter_Input(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes));
//Set output buffer to hold detected keypoints
std::vector<NvAR_Point2f> keypoints;
std::vector<NvAR_Point3f> keypoints3D;
std::vector<NvAR_Point3f> jointAngles;
std::vector<float> keypoints_confidence;
// Get the number of keypoints
unsigned int numKeyPoints;
NvAR_GetU32(keyPointDetectHandle, NvAR_Parameter_Config(NumKeyPoints), &numKeyPoints);
keypoints.assign(batchSize * numKeyPoints , {0.f, 0.f});
keypoints3D.assign(batchSize * numKeyPoints , {0.f, 0.f, 0.f});
jointAngles.assign(batchSize * numKeyPoints , {0.f, 0.f, 0.f});
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(KeyPoints), keypoints.data(), sizeof(NvAR_Point2f));
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(KeyPoints3D), keypoints3D.data(), sizeof(NvAR_Point3f));
NvAR_SetF32Array(keyPointDetectHandle, NvAR_Parameter_Output(KeyPointsConfidence), keypoints_confidence.data(), batchSize * numKeyPoints);
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(JointAngles), jointAngles.data(), sizeof(NvAR_Point3f));
//Set output memory for bounding boxes
NvAR_BBoxes = output_boxes{};
output_bboxes.boxes = new NvAR_Rect[25];
output_bboxes.max_boxes = 25;
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(BoundingBoxes), &output_bboxes, sizeof(NvAR_BBoxes));
NvAR_Run(keyPointDetectHandle);
1.6.5.3. Multi-Person Tracking for 3D Body Pose Tracking (Windows Only)
The feature relies on temporal information to track the person in the scene. The keypoints information from the previous frame is used to estimate the keypoints of the next frame.
The feature provides the ability to track multiple people in the following ways:
- In the scene across different frames.
- When they leave the scene and enter the scene again.
- When they are completely occluded by an object or another person and reappear (controlled using Shadow Tracking Age).
- Shadow Tracking Age
This option represents the period of time where a target is still being tracked in the background even when the target is not associated with a detector object. When a target is not associated with a detector object for a time frame, shadowTrackingAge, an internal variable of the target, is incremented. After the target is associated with a detector object, shadowTrackingAge will be reset to zero. When the target age reaches the shadow tracking age, the target is discarded and is no longer tracked. This is measured by the number of frames, and the default is 90.
- Probation Age
This option is the length of probationary period. After an object reaches this age, it is considered to be valid and is appointed an ID. This will help with false positives, where false objects are detected only for a few frames. This is measured by the number of frames, and the default is 10.
- Maximum Targets Tracked
This option is the maximum number of targets to be tracked, which can be composed of the targets that are active in the frame and ones in shadow tracking mode. When you select this value, keep the active and inactive targets in mind. The minimum is 1 and the default is 30.
Currently, we only actively track eight people in the scene. There can be more than eight people throughout the video but only a maximum of eight people in a given frame. Temporal mode is not supported for Multi-Person Tracking. The batch size should be 8 when Multi-Person Tracking is enabled. This feature is currently Windows only.
This example uses the 3D Body Pose Tracking AR feature to enable multi-person tracking and object the tracking ID for each person:
//Set input image buffer
NvAR_SetObject(keypointDetectHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
// Enable Multi-Person Tracking
NvAR_SetU32(keyPointDetectHandle, NvAR_Parameter_Config(TrackPeople), bEnablePeopleTracking);
// Set Shadow Tracking Age
NvAR_SetU32(keyPointDetectHandle, NvAR_Parameter_Config(ShadowTrackingAge), shadowTrackingAge);
// Set Probation Age
NvAR_SetU32(keyPointDetectHandle, NvAR_Parameter_Config(ProbationAge), probationAge);
// Set Maximum Targets to be tracked
NvAR_SetU32(keyPointDetectHandle, NvAR_Parameter_Config(MaxTargetsTracked), maxTargetsTracked);
//Set output buffer to hold detected keypoints
std::vector<NvAR_Point2f> keypoints;
std::vector<NvAR_Point3f> keypoints3D;
std::vector<NvAR_Point3f> jointAngles;
std::vector<float> keypoints_confidence;
// Get the number of keypoints
unsigned int numKeyPoints;
NvAR_GetU32(keyPointDetectHandle, NvAR_Parameter_Config(NumKeyPoints), &numKeyPoints);
keypoints.assign(batchSize * numKeyPoints , {0.f, 0.f});
keypoints3D.assign(batchSize * numKeyPoints , {0.f, 0.f, 0.f});
jointAngles.assign(batchSize * numKeyPoints , {0.f, 0.f, 0.f});
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(KeyPoints), keypoints.data(), sizeof(NvAR_Point2f));
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(KeyPoints3D), keypoints3D.data(), sizeof(NvAR_Point3f));
NvAR_SetF32Array(keyPointDetectHandle, NvAR_Parameter_Output(KeyPointsConfidence), keypoints_confidence.data(), batchSize * numKeyPoints);
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(JointAngles), jointAngles.data(), sizeof(NvAR_Point3f));
//Set output memory for tracking bounding boxes
NvAR_TrackingBBoxes output_tracking_bboxes{};
std::vector<NvAR_TrackingBBox> output_tracking_bbox_data;
output_tracking_bbox_data.assign(maxTargetsTracked, { 0.f, 0.f, 0.f, 0.f, 0 });
output_tracking_bboxes.boxes = output_tracking_bbox_data.data();
output_tracking_bboxes.max_boxes = (uint8_t)output_tracking_bbox_size;
NvAR_SetObject(keyPointDetectHandle, NvAR_Parameter_Output(TrackingBoundingBoxes), &output_tracking_bboxes, sizeof(NvAR_TrackingBBoxes));
NvAR_Run(keyPointDetectHandle);
1.6.6. Facial Expression Estimation
This section provides information about how to use the Facial Expression Estimation feature.
1.6.6.1. Facial Expression Estimation for Static Frames (Images)
Typically, the input to the Facial Expression Estimation feature is an input image and a set of detected landmark points corresponding to the face on which we want to estimate face expression coefficients.
Here is the typical usage of this feature, where the detected facial keypoints from the Landmark Detection feature are passed as input to this feature:
//Set facial keypoints from Landmark Detection as an input
err = NvAR_SetObject(faceExpressionHandle, NvAR_Parameter_Input(Landmarks), facial_landmarks.data(), sizeof(NvAR_Point2f));
//Set output memory for expression coefficients
unsigned int expressionCount;
err = NvAR_GetU32(faceExpressionHandle, NvAR_Parameter_Config(ExpressionCount), &expressionCount);
float expressionCoeffs = new float[expressionCount];
err = NvAR_SetF32Array(faceExpressionHandle, NvAR_Parameter_Output(ExpressionCoefficients), expressionCoeffs, expressionCount);
//Set output memory for pose rotation quaternion
NvAR_Quaternion pose = new NvAR_Quaternion();
err = NvAR_SetObject(faceExpressionHandle, NvAR_Parameter_Output(Pose), pose, sizeof(NvAR_Quaternion));
//OPTIONAL – Set output memory for bounding boxes, and their confidences if desired
err = NvAR_Run(faceExpressionHandle);
1.6.6.2. Alternative Usage of the Facial Expression Estimation Feature
Similar to the alternative usage of the Landmark detection feature and the Face 3D Mesh Feature, the Facial Expression Estimation feature can be used to determine the detected face bounding box, the facial keypoints, and a 3D face mesh and its rendering parameters.
Instead of the facial keypoints of a face, if an input image is provided, the face and the facial keypoints are automatically detected and used to run the expression estimation. When run this way, if BoundingBoxes and/or Landmarks are set as optional output properties for this feature, these properties will be populated with the bounding box that contains the face and the detected facial keypoints, respectively.
ExpressionCoefficients and Pose are not optional properties for this feature, and to run the feature, these properties must be set with user-provided output buffers.
Additionally, if this feature is run without providing facial keypoints as an input, the path pointed to by the ModelDir config parameter must also contain the face and landmark detection TRT package files. Optionally, the CUDAStream and the Temporal flag can be set for those features.
The expression coefficients can be used to drive the expressions of an avatar.
The facial keypoints and/or the face bounding box that were determined internally can be queried from this feature but are not required for the feature to run.
This example uses the Facial Expression Estimation feature to obtain the face expression coefficients directly from the image, without explicitly running Landmark Detection or Face Detection:
//Set input image buffer instead of providing facial keypoints
NvAR_SetObject(faceExpressionHandle, NvAR_Parameter_Input(Image), &inputImageBuffer, sizeof(NvCVImage));
//Set output memory for expression coefficients
unsigned int expressionCount;
err = NvAR_GetU32(faceExpressionHandle, NvAR_Parameter_Config(ExpressionCount), &expressionCount);
float expressionCoeffs = new float[expressionCount];
err = NvAR_SetF32Array(faceExpressionHandle, NvAR_Parameter_Output(ExpressionCoefficients), expressionCoeffs, expressionCount);
//Set output memory for pose rotation quaternion
NvAR_Quaternion pose = new NvAR_Quaternion();
err = NvAR_SetObject(faceExpressionHandle, NvAR_Parameter_Output(Pose), pose, sizeof(NvAR_Quaternion));
//OPTIONAL - Set facial keypoints as an output
NvAR_SetObject(faceExpressionHandle, NvAR_Parameter_Output(Landmarks), facial_landmarks.data(),sizeof(NvAR_Point2f));
//OPTIONAL – Set output memory for bounding boxes, or other parameters, such as pose, bounding box/landmarks confidence, etc.
NvAR_Run(faceExpressionHandle);
1.6.6.3. Facial Expression Estimation Tracking for Temporal Frames (Videos)
If the Temporal flag is set and face and landmark detection are run internally, these features will be optimized for temporally related frames.
This means that face and facial keypoints will be tracked across frames, and only one bounding box will be returned, if requested, as an output. If the Face Detection, and Landmark Detection features are used explicitly, they need their own Temporal flags to be set, however, the temporal flag also affects the Facial Expression Estimation feature through the NVAR_TEMPORAL_FILTER_FACIAL_EXPRESSIONS, NVAR_TEMPORAL_FILTER_FACIAL_GAZE, and NVAR_TEMPORAL_FILTER_ENHANCE_EXPRESSIONS bits.
1.7. Using Multiple GPUs
Applications that are developed with the AR SDK can be used with multiple GPUs. By default, the SDK determines which GPU to use based on the capability of the currently selected GPU. If the currently selected GPU supports the AR SDK, the SDK uses it. Otherwise, the SDK selects the best GPU.
You can control which GPU is used in a multi-GPU environment by using the cudaSetDevice(int whichGPU) and cudaGetDevice(int *whichGPU) NVIDIA CUDA® Toolkit functions and the NvAR_SetS32(NULL, NvAR_Parameter_Config(GPU), whichGPU) AR SDK Set function. The Set() call is called only once for the AR SDK before any effects are created. Since it is impossible to transparently pass images that are allocated on one GPU to another GPU, you must ensure that the same GPU is used for all AR features.
NvCV_Status err;
int chosenGPU = 0; // or whatever GPU you want to use
err = NvAR_SetS32(NULL, NvAR_Parameter_Config(GPU), chosenGPU);
if (NVCV_SUCCESS != err) {
printf(“Error choosing GPU %d: %s\n”, chosenGPU,
NvCV_GetErrorStringFromCode(err));
}
cudaSetDevice(chosenGPU);
NvCVImage dst = new NvCVImage(…);
NvAR_Handle eff;
err = NvAR_API NvAR_CreateEffect(code, &eff);
…
err = NvAR_API NvAR_Load(eff);
err = NvAR_API NvAR_Run(eff, true);
// switch GPU for other task, then switch back for next frame
Buffers need to be allocated on the selected GPU, so before you allocate images on the GPU, call cudaSetDevice(). Neural networks need to be loaded on the selected GPU, so before NvAR_Load() is called, set this GPU as the current device.
To use the buffers and models, before you call NvAR_Run() and set the GPU device as the current device. A previous call to NvAR_SetS32(NULL, NvAR_Parameter_Config(GPU), whichGPU)helps enforce this requirement.
For performance concerns, switching to the appropriate GPU is the responsibility of the application.
1.7.1. Default Behavior in Multi-GPU Environments
The NvAR_Load() function internally calls cudaGetDevice() to identify the currently selected GPU.
The function checks the compute capability of the currently selected GPU (default 0) to determine whether the GPU architecture supports the AR SDK and completes one of the following tasks:
- If the SDK is supported,
NvAR_Load()uses the GPU. - If the SDK is not supported,
NvAR_Load()searches for the most powerful GPU that supports the AR SDK and callscudaSetDevice()to set that GPU as the current GPU.
If you do not require your application to use a specific GPU in a multi-GPU environment, the default behavior should suffice.
1.7.2. Selecting the GPU for AR SDK Processing in a Multi-GPU Environment
Your application might be designed to only perform the task of applying an AR filter by using a specific GPU in a multi-GPU environment. In this situation, ensure that the AR SDK does not override your choice of GPU for applying the video effect filter.
// Initialization
cudaGetDevice(&beforeGPU);
err = NvAR_Load(eff);
if (NVCV_SUCCESS != err) { printf("Cannot load ARSDK: %s\n",
NvCV_GetErrorStringFromCode(err)); exit(-1); }
cudaGetDevice(&arsdkGPU);
if (beforeGPU != arsdkGPU) {
printf("GPU #%d cannot run AR SDK, so GPU #%d was chosen instead\n",
beforeGPU, arsdkGPU);
}
1.7.3. Selecting Different GPUs for Different Tasks
Your application might be designed to perform multiple tasks in a multi-GPU environment such as, for example, rendering a game and applying an AR filter. In this situation, select the best GPU for each task before calling NvAR_Load().
- Call
cudaGetDeviceCount()to determine the number of GPUs in your environment.// Get the number of GPUs cuErr = cudaGetDeviceCount(&deviceCount);
- Get the properties of each GPU and determine whether it is the best GPU for each task by performing the following operations for each GPU in a loop:
- Call
cudaSetDevice()to set the current GPU. - Call
cudaGetDeviceProperties()to get the properties of the current GPU. - To determine whether the GPU is the best GPU for each specific task, use a custom code in your application to analyze the properties that were retrieved by
cudaGetDeviceProperties().This example uses the compute capability to determine whether a GPU’s properties should be analyzed and determine whether the current GPU is the best GPU on which to apply a video effect filter. A GPU’s properties are analyzed only when the compute capability is is 7.5, 8.6, or 8.9, which denotes a GPU that is based on Turing, the Ampere architecture, or the Ada architecture respectively.
// Loop through the GPUs to get the properties of each GPU and //determine if it is the best GPU for each task based on the //properties obtained. for (int dev = 0; dev < deviceCount; ++dev) { cudaSetDevice(dev); cudaGetDeviceProperties(&deviceProp, dev); if (DeviceIsBestForARSDK(&deviceProp)) gpuARSDK = dev; if (DeviceIsBestForGame(&deviceProp)) gpuGame = dev; ... } cudaSetDevice(gpuARSDK); err = NvAR_Set...; // set parameters err = NvAR_Load(eff);
- Call
- In the loop to complete the application’s tasks, select the best GPU for each task before performing the task.
- Call
cudaSetDevice()to select the GPU for the task. - Make all the function calls required to perform the task.
In this way, you select the best GPU for each task only once without setting the GPU for every function call.
This example selects the best GPU for rendering a game and uses custom code to render the game. It then selects the best GPU for applying a video effect filter before calling the
NvCVImage_Transfer()andNvAR_Run()functions to apply the filter, avoiding the need to save and restore the GPU for every AR SDK API call.// Select the best GPU for each task and perform the task. while (!done) { ... cudaSetDevice(gpuGame); RenderGame(); cudaSetDevice(gpuARSDK); err = NvAR_Run(eff, 1); ... }
- Call
1.7.4. Using Multi-Instance GPU (Linux Only)
Applications that are developed with the AR SDK can be deployed on Multi-Instance GPU (MIG) on supported devices, such as NVIDIA DGX™ A100.
MIG allows you to partition a device into up to seven multiple GPU instances, each with separate streaming multiprocessors, separate slices of the GPU memory, and separate pathways to the memory. This process ensures that heavy resource usage by an application on one partition does not impact the performance of the applications running on other partitions.
To run an application on a MIG partition, you do not have to call any additional SDK API in your application. You can specify which MIG instance to use for execution during invocation of your application. You can select the MIG instance using one of the following options:
- The bare-metal method of using
CUDA_VISIBLE_DEVICESenvironment variable. - The container method by using the NVIDIA Container Toolkit.
MIG is supported only on Linux.
Refer to the NVIDIA Multi-Instance GPU User Guide for more information about the MIG and its usage.
This section provides detailed information about the APIs in the AR SDK.
2.1. Structures
The structures in the AR SDK are defined in the following header files:
nvAR.hnvAR_defs.h
The structures defined in the nvAR_defs.h header file are mostly data types.
2.1.1. NvAR_BBoxes
Here is detailed information about the NvAR_BBoxes structure.
struct NvAR_BBoxes {
NvAR_Rect *boxes;
uint8_t num_boxes;
uint8_t max_boxes;
};
Members
- boxes
-
Type:
NvAR_Rect *Pointer to an array of bounding boxes that are allocated by the user.
- num_boxes
-
Type:
uint8_tThe number of bounding boxes in the array.
- max_boxes
-
Type:
uint8_tThe maximum number of bounding boxes that can be stored in the array as defined by the user.
Remarks
This structure is returned as the output of the face detection feature.
Defined in: nvAR_defs.h
2.1.2. NvAR_TrackingBBox
Here is detailed information about the NvAR_TrackingBBox structure.
struct NvAR_TrackingBBox {
NvAR_Rect bbox;
uint16_t tracking_id;
};
Members
- bbox
-
Type:
NvAR_RectBounding box that is allocated by the user.
- tracking_id
-
Type:
uint16_tThe Tracking ID assigned to the bounding box by Multi-Person Tracking.
Remarks
This structure is returned as the output of the body pose feature when multi-person tracking is enabled.
Defined in: nvAR_defs.h
2.1.3. NvAR_TrackingBBoxes
Here is detailed information about the NvAR_TrackingBBoxes structure.
struct NvAR_TrackingBBoxes {
NvAR_TrackingBBox *boxes;
uint8_t num_boxes;
uint8_t max_boxes;
};
Members
- boxes
-
Type:
NvAR_TrackingBBox *Pointer to an array of tracking bounding boxes that are allocated by the user.
- num_boxes
-
Type:
uint8_tThe number of bounding boxes in the array.
- max_boxes
-
Type:
uint8_tThe maximum number of bounding boxes that can be stored in the array as defined by the user.
Remarks
This structure is returned as the output of the body pose feature when multi-person tracking is enabled.
Defined in: nvAR_defs.h
2.1.4. NvAR_FaceMesh
Here is detailed information about the NvAR_FaceMesh structure.
struct NvAR_FaceMesh {
NvAR_Vec3<float> *vertices;
size_t num_vertices;
NvAR_Vec3<unsigned short> *tvi;
size_t num_tri_idx;
};
Members
- vertices
-
Type:
NvAR_Vec3<float>*Pointer to an array of vectors that represent the mesh 3D vertex positions.
- num_triangles
-
Type:
size_tThe number of mesh triangles.
- tvi
-
Type:
NvAR_Vec3<unsigned short> *Pointer to an array of vectors that represent the mesh triangle's vertex indices.
- num_tri_idx
-
Type:
size_tThe number of mesh triangle vertex indices.
Remarks
This structure is returned as an output of the Mesh Tracking feature.
Defined in: nvAR_defs.h
2.1.5. NvAR_Frustum
Here is detailed information about the NvAR_Frustum structure.
struct NvAR_Frustum {
float left = -1.0f;
float right = 1.0f;
float bottom = -1.0f;
float top = 1.0f;
};
Members
- left
-
Type:
floatThe X coordinate of the top-left corner of the viewing frustum.
- right
-
Type:
floatThe X coordinate of the bottom-right corner of the viewing frustum.
- bottom
-
Type:
floatThe Y coordinate of the bottom-right corner of the viewing frustum.
- top
-
Type:
floatThe Y coordinate of the top-left corner of the viewing frustum.
Remarks
This structure represents a camera viewing frustum for an orthographic camera. As a result, it contains only the left, the right, the top, and the bottom coordinates in pixels. It does not contain a near or a far clipping plane.
Defined in: nvAR_defs.h
2.1.6. NvAR_FeatureHandle
Here is detailed information about the NvAR_FeatureHandle structure.
typedef struct nvAR_Feature *NvAR_FeatureHandle;
Remarks
This type defines the handle of a feature that is defined by the SDK. It is used to reference the feature at runtime when the feature is executed and must be destroyed when it is no longer required.
Defined in: nvAR_defs.h
2.1.7. NvAR_Point2f
Here is detailed information about the NvAR_Point2f structure.
typedef struct NvAR_Point2f {
float x, y;
} NvAR_Point2f;
Members
- x
-
Type:
floatThe X coordinate of the point in pixels.
- y
-
Type:
floatThe Y coordinate of the point in pixels.
Remarks
This structure represents the X and Y coordinates of one point in 2D space.
Defined in: nvAR_defs.h
2.1.8. NvAR_Point3f
Here is detailed information about the NvAR_Point3f structure.
typedef struct NvAR_Point3f {
float x, y, z;
} NvAR_Point3f;
Members
- x
-
Type:
floatThe X coordinate of the point in pixels.
- y
-
Type:
floatThe Y coordinate of the point in pixels.
- z
-
Type:
floatThe Z coordinate of the point in pixels.
Remarks
This structure represents the X, Y, Z coordinates of one point in 3D space.
Defined in: nvAR_defs.h
2.1.9. NvAR_Quaternion
Here is detailed information about the NvAR_Quaternion structure.
struct NvAR_Quaternion {
float x, y, z, w;
};
Members
- x
-
Type:
floatThe first coefficient of the complex part of the quaternion.
- y
-
Type:
floatThe second coefficient of the complex part of the quaternion.
- z
-
Type:
floatThe third coefficient of the complex part of the quaternion.
- w
-
Type:
floatThe scalar coefficient of the quaternion.
Remarks
This structure represents the coefficients in the quaternion that are expressed in the following equation:
Defined in: nvAR_defs.h
2.1.10. NvAR_Rect
Here is detailed information about the NvAR_Rect structure.
typedef struct NvAR_Rect {
float x, y, width, height;
} NvAR_Rect;
Members
- x
-
Type:
floatThe X coordinate of the top left corner of the bounding box in pixels.
- y
-
Type:
floatThe Y coordinate of the top left corner of the bounding box in pixels.
- width
-
Type:
floatThe width of the bounding box in pixels.
- height
-
Type:
floatThe height of the bounding box in pixels.
Remarks
This structure represents the position and size of a rectangular 2D bounding box.
Defined in: nvAR_defs.h
2.1.11. NvAR_RenderingParams
Here is detailed information about the NvAR_RenderingParams structure.
struct NvAR_RenderingParams {
NvAR_Frustum frustum;
NvAR_Quaternion rotation;
NvAR_Vec3<float> translation;
};
Members
- frustum
-
Type:
NvAR_FrustumThe camera viewing frustum for an orthographic camera.
- rotation
-
Type:
NvAR_QuaternionThe rotation of the camera relative to the mesh.
- translation
-
Type:
NvAR_Vec3<float>The translation of the camera relative to the mesh.
Remarks
This structure defines the parameters that are used to draw a 3D face mesh in a window on the computer screen so that the face mesh is aligned with the corresponding video frame. The projection matrix is constructed from the frustum parameter, and the model view matrix is constructed from the rotation and translation parameters.
Defined in: nvAR_defs.h
2.1.12. NvAR_Vector2f
Here is detailed information about the NvAR_Vector2f structure.
typedef struct NvAR_Vector2f {
float x, y;
} NvAR_Vector2f;
Members
- x
-
Type:
floatThe X component of the 2D vector.
- y
-
Type:
floatThe Y component of the 2D vector.
Remarks
This structure represents a 2D vector.
Defined in: nvAR_defs.h
2.1.13. NvAR_Vector3f
Here is detailed information about the NvAR_Vector3f structure.
typedef struct NvAR_Vector3f {
float vec[3];
} NvAR_Vector3f;
Members
- vec
-
Type: float array of size 3
A vector of size 3.
Remarks
This structure represents a 3D vector.
Defined in: nvAR_defs.h
2.1.14. NvAR_Vector3u16
Here is detailed information about the NvAR_Vector3u16 structure.
typedef struct NvAR_Vector3u16 {
unsigned short vec[3];
} NvAR_Vector3u16;
Members
- vec
-
Type: unsigned short array of size 3
A vector of size 3.
Remarks
This structure represents a 3D vector.
Defined in: nvAR_defs.h
2.2. Functions
This section provides information about the functions in the AR SDK.
2.2.1. NvAR_Create
Here is detailed information about the NvAR_Create structure.
NvAR_Result NvAR_Create(
NvAR_FeatureID featureID,
NvAR_FeatureHandle *handle
);
Parameters
- featureID [in]
-
Type:
NvAR_FeatureIDThe type of feature to be created.
- handle[out]
-
Type:
NvAR_FeatureHandle *A handle to the newly created feature instance.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_FEATURENOTFOUNDNVCV_ERR_INITIALIZATION
Remarks
This function creates an instance of the specified feature type and writes a handle to the feature instance to the handle out parameter.
2.2.2. NvAR_Destroy
Here is detailed information about the NvAR_Destroy structure.
NvAR_Result NvAR_Destroy(
NvAR_FeatureHandle handle
);
Parameters
- handle [in]
-
Type:
NvAR_FeatureHandleThe handle to the feature instance to be released.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_FEATURENOTFOUND
Remarks
This function releases the feature instance with the specified handle. Because handles are not reference counted, the handle is invalid after this function is called.
2.2.3. NvAR_Load
Here is detailed information about the NvAR_Load structure.
NvAR_Result NvAR_Load(
NvAR_FeatureHandle handle,
);
Parameters
- handle [in]
-
Type:
NvAR_FeatureHandleThe handle to the feature instance to load.
Return Value
Returns one of the following values:
NVCV_SUCCESS on successNVCV_ERR_MISSINGINPUTNVCV_ERR_FEATURENOTFOUNDNVCV_ERR_INITIALIZATIONNVCV_ERR_UNIMPLEMENTED
Remarks
This function loads the specified feature instance and validates any configuration properties that were set for the feature instance.
2.2.4. NvAR_Run
Here is detailed information about the NvAR_Run structure.
NvAR_Result NvAR_Run(
NvAR_FeatureHandle handle,
);
Parameters
- handle[in]
-
Type: const
NvAR_FeatureHandleThe handle to the feature instance to be run.
Return Value
Returns one of the following values:
NVCV_SUCCESS on successNVCV_ERR_GENERALNVCV_ERR_FEATURENOTFOUNDNVCV_ERR_MEMORYNVCV_ERR_MISSINGINPUTNVCV_ERR_PARAMETER
Remarks
This function validates the input/output properties that are set by the user, runs the specified feature instance with the input properties that were set for the instance, and writes the results to the output properties set for the instance. The input and output properties are set by the accessor functions. Refer to Summary of NVIDIA AR SDK Accessor Functions for more information.
2.2.5. NvAR_GetCudaStream
Here is detailed information about the NvAR_GetCudaStream structure.
NvAR_GetCudaStream(
NvAR_FeatureHandle handle,
const char *name,
const CUStream *stream
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you want to get the CUDA stream.
- name
-
Type:
const char *The
NvAR_Parameter_Config(CUDAStream)key value. Any other key value returns an error. - stream
-
Type:
const CUStream *Pointer to the CUDA stream where the CUDA stream retrieved is to be written.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_MISSINGINPUTNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the CUDA stream in which the specified feature instance will run and writes the CUDA stream to be retrieved to the location that is specified by the stream parameter.
2.2.6. NvAR_CudaStreamCreate
Here is detailed information about the NvAR_CudaStreamCreate structure.
NvCV_Status NvAR_CudaStreamCreate(
CUstream *stream
);
Parameters
- stream [out]
-
Type:
CUstream *The location in which to store the newly allocated CUDA stream.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_CUDA_VALUEif a CUDA parameter is not within its acceptable range.
Remarks
This function creates a CUDA stream. It is a wrapper for the CUDA Runtime API function cudaStreamCreate() that you can use to avoid linking with the NVIDIA CUDA Toolkit libraries. This function and cudaStreamCreate() are equivalent and interchangeable.
2.2.7. NvAR_CudaStreamDestroy
Here is detailed information about the NvAR_CudaStreamDestroy structure.
void NvAR_CudaStreamDestroy(
CUstream stream
);
Parameters
- stream [in]
-
Type: CUstream
The CUDA stream to destroy.
Return Value
Remarks
This function destroys a CUDA stream. It is a wrapper for the CUDA Runtime API function cudaStreamDestroy() that you can use to avoid linking with the NVIDIA CUDA Toolkit libraries. This function and cudaStreamDestroy() are equivalent and interchangeable.
2.2.8. NvAR_GetF32
Here is detailed information about the NvAR_GetF32 structure.
NvAR_GetF32(
NvAR_FeatureHandle handle,
const char *name,
float *val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you want to get the specified 32-bit floating-point parameter.
- name
-
Type:
const char *The key value that is used to access the 32-bit float parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
float*Pointer to the 32-bit floating-point number where the value retrieved is to be written.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the value of the specified single-precision (32-bit) floating-point parameter for the specified feature instance and writes the value to be retrieved to the location that is specified by the val parameter.
2.2.9. NvAR_GetF64
Here is detailed information about the NvAR_GetF64 structure.
NvAR_GetF64(
NvAR_FeatureHandle handle,
const char *name,
double *val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you want to get the specified 64-bit floating-point parameter.
- name
-
Type:
const char *The key value used to access the 64-bit double parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
double*Pointer to the 64-bit double-precision floating-point number where the retrieved value will be written.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the value of the specified double-precision (64-bit) floating-point parameter for the specified feature instance and writes the retrieved value to the location that is specified by the val parameter.
2.2.10. NvAR_GetF32Array
Here is detailed information about the NvAR_GetF32Array structure.
NvAR_GetFloatArray (
NvAR_FeatureHandle handle,
const char *name,
const float** vals,
int *count
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you want to get the specified float array.
- name
-
Type:
const char *Refer to Key Values in the Properties of a Feature Type for a complete list of key values.
- vals
-
Type:
const float**Pointer to an array of floating-point numbers where the retrieved values will be written.
- count
-
Type:
int *Currently unused. The number of elements in the array that is specified by the vals parameter.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_MISSINGINPUTNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the values in the specified floating-point array for the specified feature instance and writes the retrieved values to an array at the location that is specified by the vals parameter.
2.2.11. NvAR_GetObject
Here is detailed information about the NvAR_GetObject structure.
NvAR_GetObject(
NvAR_FeatureHandle handle,
const char *name,
const void **ptr,
unsigned long typeSize
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you can get the specified object.
- name
-
Type:
const char *Refer to Key Values in the Properties of a Feature Type for a complete list of key values.
- ptr
-
Type:
const void**A pointer to the memory that is allocated for the objects defined in Structures.
- typeSize
-
Type: unsigned long
The size of the item to which the pointer points. If the size does not match, an
NVCV_ERR_MISMATCHis returned.
Return Value
Returns one of the following values:
NVCV_SUCCESS on successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_MISSINGINPUTNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the specified object for the specified feature instance and stores the object in the memory location that is specified by the ptr parameter.
2.2.12. NvAR_GetS32
Here is detailed information about the NvAR_GetS32 structure.
NvAR_GetS32(
NvAR_FeatureHandle handle,
const char *name,
int *val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you get the specified 32-bit signed integer parameter.
- name
-
Type:
const char *The key value that is used to access the signed integer parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
int*Pointer to the 32-bit signed integer where the retrieved value will be written.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the value of the specified 32-bit signed integer parameter for the specified feature instance and writes the retrieved value to the location that is specified by the val parameter.
2.2.13. NvAR_GetString
Here is detailed information about the NvAR_GetString structure.
NvAR_GetString(
NvAR_FeatureHandle handle,
const char *name,
const char** str
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you get the specified character string parameter.
- name
-
Type:
const char *Refer to Key Values in the Properties of a Feature Type for a complete list of key values.
- str
-
Type:
const char**The address where the requested character string pointer is stored.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_MISSINGINPUTNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the value of the specified character string parameter for the specified feature instance and writes the retrieved string to the location that is specified by the str parameter.
2.2.14. NvAR_GetU32
Here is detailed information about the NvAR_GetU32 structure.
NvAR_GetU32(
NvAR_FeatureHandle handle,
const char *name,
unsigned int* val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance from which you want to get the specified 32-bit unsigned integer parameter.
- name
-
Type:
const char *The key value that is used to access the unsigned integer parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
unsigned int*Pointer to the 32-bit unsigned integer where the retrieved value will be written.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the value of the specified 32-bit unsigned integer parameter for the specified feature instance and writes the retrieved value to the location that is specified by the val parameter.
2.2.15. NvAR_GetU64
Here is detailed information about the NvAR_GetU64 structure.
NvAR_GetU64(
NvAR_FeatureHandle handle,
const char *name,
unsigned long long *val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the returned feature instance from which you get the specified 64-bit unsigned integer parameter.
- name
-
Type:
const char *The key value used to access the unsigned 64-bit integer parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
unsigned long long*Pointer to the 64-bit unsigned integer where the retrieved value will be written.
Return Values
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function gets the value of the specified 64-bit unsigned integer parameter for the specified feature instance and writes the retrieved value to the location specified by the va1 parameter.
2.2.16. NvAR_SetCudaStream
Here is detailed information about the NvAR_SetCudaStream structure.
NvAR_SetCudaStream(
NvAR_FeatureHandle handle,
const char *name,
CUStream stream
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance that is returned for which you want to set the CUDA stream.
- name
-
Type:
const char *The
NvAR_Parameter_Config(CUDAStream)key value. Any other key value returns an error. - stream
-
Type:
CUStreamThe CUDA stream in which to run the feature instance on the GPU.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the CUDA stream, in which the specified feature instance will run, to the parameter stream.
Defined in: nvAR.h
2.2.17. NvAR_SetF32
Here is detailed information about the NvAR_SetF32 structure.
NvAR_SetF32(
NvAR_FeatureHandle handle,
const char *name,
float val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified 32-bit floating-point parameter.
- name
-
Type:
const char *The key value used to access the 32-bit float parameters as defined in nvAR_defs.h and in Key Values in the Properties of a Feature Type.
- val
-
Type:
floatThe 32-bit floating-point number to which the parameter is to be set.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the specified single-precision (32-bit) floating-point parameter for the specified feature instance to the val parameter.
2.2.18. NvAR_SetF64
Here is detailed information about the NvAR_SetF64 structure.
NvAR_SetF64(
NvAR_FeatureHandle handle,
const char *name,
double val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified 64-bit floating-point parameter.
- name
-
Type:
const char *The key value used to access the 64-bit float parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
doubleThe 64-bit double-precision floating-point number to which the parameter will be set.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the specified double-precision (64-bit) floating-point parameter for the specified feature instance to the val parameter.
2.2.19. NvAR_SetF32Array
Here is detailed information about the NvAR_SetF32Array structure.
NvAR_SetFloatArray(
NvAR_FeatureHandle handle,
const char *name,
float* vals,
int count
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified float array.
- name
-
Type:
const char *Refer to Key Values in the Properties of a Feature Type for a complete list of key values.
- vals
-
Type:
float*An array of floating-point numbers to which the parameter will be set.
- count
-
Type:
intCurrently unused. The number of elements in the array that is specified by the
valsparameter.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function assigns the array of floating-point numbers that are defined by the vals parameter to the specified floating-point-array parameter for the specified feature instance.
2.2.20. NvAR_SetObject
Here is detailed information about the NvAR_SetObject structure.
NvAR_SetObject(
NvAR_FeatureHandle handle,
const char *name,
void *ptr,
unsigned long typeSize
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified object.
- name
-
Type:
const char *Refer to Key Values in the Properties of a Feature Type for a complete list of key values.
- ptr
-
Type:
void*A pointer to memory that was allocated to the objects that were defined in Structures.
- typeSize
-
Type:
unsigned longThe size of the item to which the pointer points. If the size does not match, an
NVCV_ERR_MISMATCHis returned.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function assigns the memory of the object that was specified by the ptr parameter to the specified object parameter for the specified feature instance.
2.2.21. NvAR_SetS32
Here is detailed information about the NvAR_SetS32 structure.
NvAR_SetS32(
NvAR_FeatureHandle handle,
const char *name,
int val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified 32-bit signed integer parameter.
- name
-
Type:
const char *The key value used to access the signed 32-bit integer parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
intThe 32-bit signed integer to which the parameter will be set.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the specified 32-bit signed integer parameter for the specified feature instance to the val parameter.
2.2.22. NvAR_SetString
Here is detailed information about the NvAR_SetString structure.
NvAR_SetString(
NvAR_FeatureHandle handle,
const char *name,
const char* str
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified character string parameter.
- name
-
Type:
const char *Refer to Key Values in the Properties of a Feature Type for a complete list of key values.
- str
-
Type:
const char*Pointer to the character string to which you want to set the parameter.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the value of the specified character string parameter for the specified feature instance to the str parameter.
2.2.23. NvAR_SetU32
Here is detailed information about the NvAR_SetU32 structure.
NvAR_SetU32(
NvAR_FeatureHandle handle,
const char *name,
unsigned int val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified 32-bit unsigned integer parameter.
- name
-
Type:
const char *The key value used to access the unsigned 32-bit integer parameters as defined in
nvAR_defs.hand in Summary of NVIDIA AR SDK Accessor Functions. - val
-
Type:
unsigned intThe 32-bit unsigned integer to which you want to set the parameter.
Return Values
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the value of the specified 32-bit unsigned integer parameter for the specified feature instance to the val parameter.
2.2.24. NvAR_SetU64
Here is detailed information about the NvAR_SetU64 structure.
NvAR_SetU64(
NvAR_FeatureHandle handle,
const char *name,
unsigned long long val
);
Parameters
- handle
-
Type:
NvAR_FeatureHandleThe handle to the feature instance for which you want to set the specified 64-bit unsigned integer parameter.
- name
-
Type:
const char *The key value used to access the unsigned 64-bit integer parameters as defined in
nvAR_defs.hand in Key Values in the Properties of a Feature Type. - val
-
Type:
unsigned long longThe 64-bit unsigned integer to which you want to set the parameter.
Return Value
Returns one of the following values:
NVCV_SUCCESSon successNVCV_ERR_PARAMETERNVCV_ERR_SELECTORNVCV_ERR_GENERALNVCV_ERR_MISMATCH
Remarks
This function sets the value of the specified 64-bit unsigned integer parameter for the specified feature instance to the val parameter.
2.3. Return Codes
The NvCV_Status enumeration defines the following values that the AR SDK functions might return to indicate error or success.
- NVCV_SUCCESS = 0
- Successful execution.
- NVCV_ERR_GENERAL
- Generic error code, which indicates that the function failed to execute for an unspecified reason.
- NVCV_ERR_UNIMPLEMENTED
- The requested feature is not implemented.
- NVCV_ERR_MEMORY
- The requested operation requires more memory than is available.
- NVCV_ERR_EFFECT
- An invalid effect handle has been supplied.
- NVCV_ERR_SELECTOR
- The specified selector is not valid for this effect filter.
- NVCV_ERR_BUFFER
- No image buffer has been specified.
- NVCV_ERR_PARAMETER
- An invalid parameter value has been supplied for this combination of effect and selector string.
- NVCV_ERR_MISMATCH
- Some parameters, for example, image formats or image dimensions, are not correctly matched.
- NVCV_ERR_PIXELFORMAT
- The specified pixel format is not supported.
- NVCV_ERR_MODEL
- An error occurred while the TRT model was being loaded.
- NVCV_ERR_LIBRARY
- An error while the dynamic library was being loaded.
- NVCV_ERR_INITIALIZATION
- The effect has not been properly initialized.
- NVCV_ERR_FILE
- The specified file could not be found.
- NVCV_ERR_FEATURENOTFOUND
- The requested feature was not found.
- NVCV_ERR_MISSINGINPUT
- A required parameter was not set.
- NVCV_ERR_RESOLUTION
- The specified image resolution is not supported.
- NVCV_ERR_UNSUPPORTEDGPU
- The GPU is not supported.
- NVCV_ERR_WRONGGPU
- The current GPU is not the one selected.
- NVCV_ERR_UNSUPPORTEDDRIVER
- The currently installed graphics driver is not supported.
- NVCV_ERR_MODELDEPENDENCIES
- There is no model with dependencies that match this system.
- NVCV_ERR_PARSE
- There has been a parsing or syntax error while reading a file.
- NVCV_ERR_MODELSUBSTITUTION
- The specified model does not exist and has been substituted.
- NVCV_ERR_READ
- An error occurred while reading a file.
- NVCV_ERR_WRITE
- An error occurred while writing a file.
- NVCV_ERR_PARAMREADONLY
- The selected parameter is read-only.
- NVCV_ERR_TRT_ENQUEUE
- TensorRT enqueue failed.
- NVCV_ERR_TRT_BINDINGS
- Unexpected TensorRT bindings.
- NVCV_ERR_TRT_CONTEXT
- An error occurred while creating a TensorRT context.
- NVCV_ERR_TRT_INFER
- There was a problem creating the inference engine.
- NVCV_ERR_TRT_ENGINE
- There was a problem deserializing the inference runtime engine.
- NVCV_ERR_NPP
- An error has occurred in the NPP library.
- NVCV_ERR_CONFIG
- No suitable model exists for the specified parameter configuration.
- NVCV_ERR_TOOSMALL
- The supplied parameter or buffer is not large enough.
- NVCV_ERR_TOOBIG
- The supplied parameter is too big.
- NVCV_ERR_WRONGSIZE
- The supplied parameter is not the expected size.
- NVCV_ERR_OBJECTNOTFOUND
- The specified object was not found.
- NVCV_ERR_SINGULAR
- A mathematical singularity has been encountered.
- NVCV_ERR_NOTHINGRENDERED
- Nothing was rendered in the specified region.
- NVCV_ERR_OPENGL
- An OpenGL error has occurred.
- NVCV_ERR_DIRECT3D
- A Direct3D error has occurred.
- NVCV_ERR_CUDA_MEMORY
- The requested operation requires more CUDA memory than is available.
- NVCV_ERR_CUDA_VALUE
- A CUDA parameter is not within its acceptable range.
- NVCV_ERR_CUDA_PITCH
- A CUDA pitch is not within its acceptable range.
- NVCV_ERR_CUDA_INIT
- The CUDA driver and runtime could not be initialized.
- NVCV_ERR_CUDA_LAUNCH
- The CUDA kernel failed to launch.
- NVCV_ERR_CUDA_KERNEL
- No suitable kernel image is available for the device.
- NVCV_ERR_CUDA_DRIVER
- The installed NVIDIA CUDA driver is older than the CUDA runtime library.
- NVCV_ERR_CUDA_UNSUPPORTED
- The CUDA operation is not supported on the current system or device.
- NVCV_ERR_CUDA_ILLEGAL_ADDRESS
- CUDA attempted to load or store an invalid memory address.
- NVCV_ERR_CUDA
- An unspecified CUDA error has occurred.
There are many other CUDA-related errors that are not listed here. However, the function NvCV_GetErrorStringFromCode() will turn the error code into a string to help you debug.
The NVIDIA 3DMM file format is based on encapsulated objects that are scoped by a FOURCC tag and a 32-bit size. The header must appear first in the file. The objects and their subobjects can appear in any order. In this guide, they are listed in the default order.
A.1. Header
The header contains the following information:
- The name
NFAC. size=8endian=0xe4(little endian)sizeBits=32indexBits=16- The offset of the table of contents .
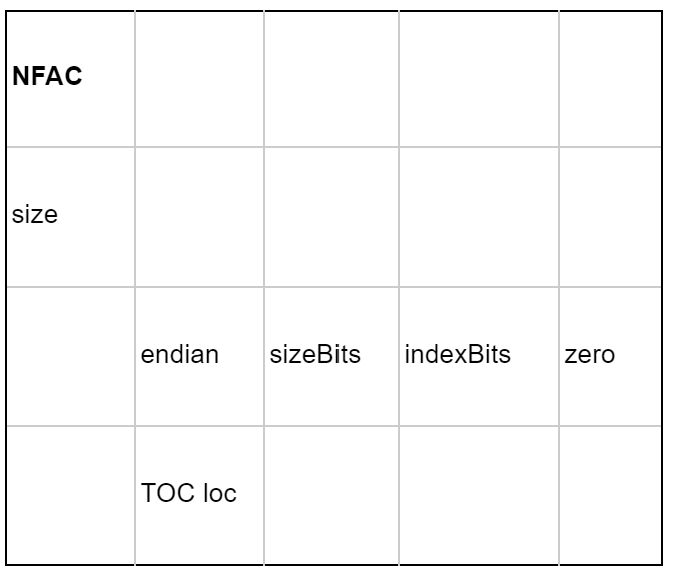
A.2. Model Object
The model object contains a shape component and an optional color component.
Both objects contain the following information:
- A mean shape.
- A set of shape modes.
- The eigenvalues for the modes.
- A triangle list.
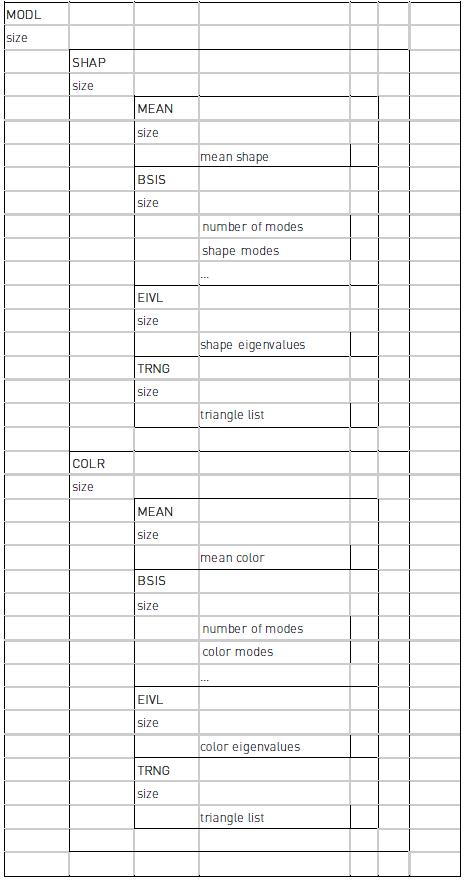
A.3. IBUG Mappings Object
Here is some information about the IBUG mappings object.
The IBUG mappings object contains the following information:
- Landmarks
- Right contour
- Left contour
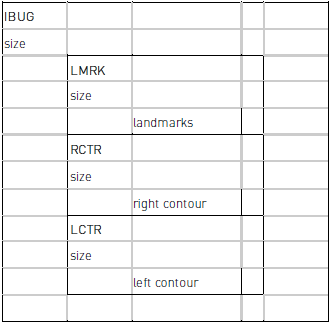
A.4. Blend Shapes Object
The blend shapes object contains a set of blend shapes, and each blend shape has a name.
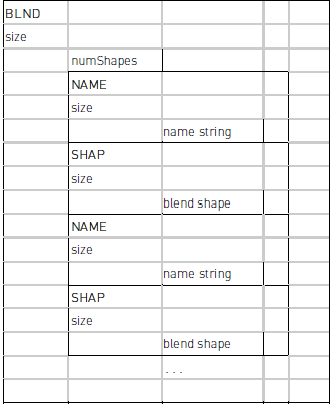
A.5. Model Contours Object
The model contours object contains a right contour and a left contour.
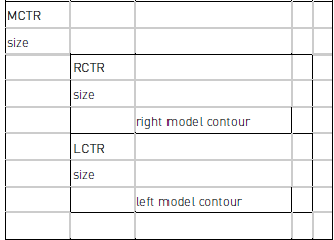
A.6. Topology Object
The topology contains a list of pairs of the adjacent faces and vertices.
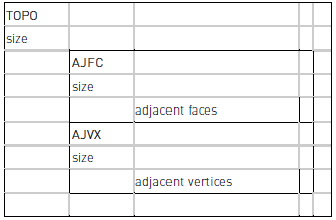
A.7. NVIDIA Landmarks Object
NVIDIA expands the number of landmarks from 68 to 126, including more detailed contours on the left and right.
A.8. Partition Object
This partitions the mesh into coherent submeshes of the same material, used for rendering.
A.9. Table of Contents Object
The optional table of contents object contains a list of tagged objects and their offsets. This object can be used to randomly access objects. The file is usually read in sequential order.
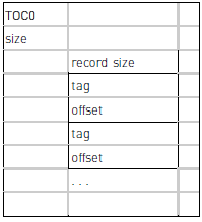
The 3D Body Pose consists of 34 Keypoints for Body Pose Tracking.
B.1. 34 Keypoints of Body Pose Tracking
Here is a list of the 34 keypoints.
The 34 Keypoints of Body Pose tracking are pelvis, left hip, right hip, torso, left knee, right knee, neck, left ankle, right ankle, left big toe, right big toe, left small toe, right small toe, left heel, right heel, nose, left eye, right eye, left ear, right ear, left shoulder, right shoulder, left elbow, right elbow, left wrist, right wrist, left pinky knuckle, right pinky knuckle, left middle tip, right middle tip, left index knuckle, right index knuckle, left thumb tip, right thumb tip.
Here is a list of the skeletal structures:
| Keypoint | Parent |
|---|---|
| Pelvis | None, as this is root. |
| Left hip | Pelvis |
| Right hip | Pelvis |
| Torso | Pelvis |
| Left knee | Left hip |
| Right knee | Right hip |
| Neck | Torso |
| Left ankle | Left knee |
| Right ankle | Right knee |
| Left big toe | Left ankle |
| Right big toe | Right ankle |
| Left small toe | Left ankle |
| Right small toe | Right ankle |
| Left heel | Left ankle |
| Right heel | Right ankle |
| Nose | Neck |
| Left eye | Nose |
| Right eye | Nose |
| Left ear | Nose |
| Right ear | Nose |
| Left shoulder | Neck |
| Right shoulder | Neck |
| Left elbow | Left shoulder |
| Right elbow | Right shoulder |
| Left wrist | Left elbow |
| Right wrist | Right elbow |
| Left pinky knuckle | Left wrist |
| Right pinky knuckle | Right wrist |
| Left middle tip | Left wrist |
| Right middle tip | Right wrist |
| Left index knuckle | Left wrist |
| Right index knuckle | Right wrist |
| Left thumb tip | Left wrist |
| Right thumb tip | Right wrist |
B.2. NvAR_Parameter_Output(KeyPoints) Order
Here is some information about the order of the keypoints.
The Keypoints order of the output from NvAR_Parameter_Output(KeyPoints) are the same as mentioned in 34 Keypoints of Body Pose Tracking.
With the SDK comes a default face model used by the face fitting feature. This model is a modification of the ICT Face Model https://github.com/ICT-VGL/ICT-FaceKit. The modified version of the face model is optimized for real time face fitting applications and is therefore of lower resolution. This model is the version face_model2.nvf. In addition to the blendshapes provided by the ICT Model, it uses linear blendshapes for eye gaze expressions, which enables it to be used in implicit gaze tracking.
In the following graphic, on the left is the original ICT face model topology, and on the right is the modified face_model2.nvf face model topology.
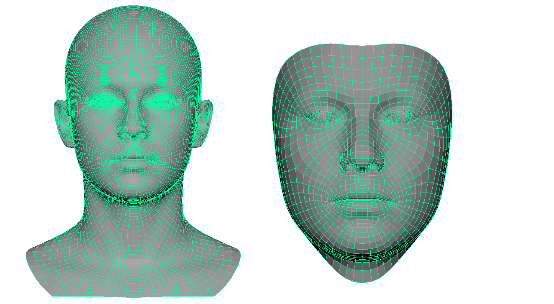
C.1. Face Expression List
Here is a graphic visualization of all expression blendshapes used in the face expression estimation feature.
|
|

|
|---|---|---|
|
|
|

|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

|

|
|
|

|

|

|

|

|

|

|

|
|

|

|

|

|

|

|

|
|

|

|

|

|

|
|
|
|
Here is the face blendshape expression list that is used in the Face 3D Mesh feature and the Facial Expression Estimation feature:
- 0: BrowDown_L
- 1: BrowDown_R
- 2: BrowInnerUp_L
- 3: BrowInnerUp_R
- 4: BrowOuterUp_L
- 5: BrowOuterUp_R
- 6: cheekPuff_L
- 7: cheekPuff_R
- 8: cheekSquint_L
- 9: cheekSquint_R
- 10: eyeBlink_L
- 11: eyeBlink_R
- 12: eyeLookDown_L
- 13: eyeLookDown_R
- 14: eyeLookIn_L
- 15: eyeLookIn_R
- 16: eyeLookOut_L
- 17: eyeLookOut_R
- 18: eyeLookUp_L
- 19: eyeLookUp_R
- 20: eyeSquint_L
- 21: eyeSquint_R
- 22: eyeWide_L
- 23: eyeWide_R
- 24: jawForward
- 25: jawLeft
- 26: jawOpen
- 27: jawRight
- 28: mouthClose
- 29: mouthDimple_L
- 30: mouthDimple_R
- 31: mouthFrown_L
- 32: mouthFrown_R
- 33: mouthFunnel
- 34: mouthLeft
- 35: mouthLowerDown_L
- 36: mouthLowerDown_R
- 37: mouthPress_L
- 38: mouthPress_R
- 39: mouthPucker
- 40: mouthRight
- 41: mouthRollLower
- 42: mouthRollUpper
- 43: mouthShrugLower
- 44: mouthShrugUpper
- 45: mouthSmile_L
- 46: mouthSmile_R
- 47: mouthStretch_L
- 48: mouthStretch_R
- 49: mouthUpperUp_L
- 50: mouthUpperUp_R
- 51: noseSneer_L
- 52: noseSneer_R
The items in the list above can be mapped to the ARKit blendshapes using the following options:
- A01_Brow_Inner_Up = 0.5 * (browInnerUp_L + browInnerUp_R)
- A02_Brow_Down_Left = browDown_L
- A03_Brow_Down_Right = browDown_R
- A04_Brow_Outer_Up_Left = browOuterUp_L
- A05_Brow_Outer_Up_Right = browOuterUp_R
- A06_Eye_Look_Up_Left = eyeLookUp_L
- A07_Eye_Look_Up_Right = eyeLookUp_R
- A08_Eye_Look_Down_Left = eyeLookDown_L
- A09_Eye_Look_Down_Right = eyeLookDown_R
- A10_Eye_Look_Out_Left = eyeLookOut_L
- A11_Eye_Look_In_Left = eyeLookIn_L
- A12_Eye_Look_In_Right = eyeLookIn_R
- A13_Eye_Look_Out_Right = eyeLookOut_R
- A14_Eye_Blink_Left = eyeBlink_L
- A15_Eye_Blink_Right = eyeBlink_R
- A16_Eye_Squint_Left = eyeSquint_L
- A17_Eye_Squint_Right = eyeSquint_R
- A18_Eye_Wide_Left = eyeWide_L
- A19_Eye_Wide_Right = eyeWide_R
- A20_Cheek_Puff = 0.5 * (cheekPuff_L + cheekPuff_R)
- A21_Cheek_Squint_Left = cheekSquint_L
- A22_Cheek_Squint_Right = cheekSquint_R
- A23_Nose_Sneer_Left = noseSneer_L
- A24_Nose_Sneer_Right = noseSneer_R
- A25_Jaw_Open = jawOpen
- A26_Jaw_Forward = jawForward
- A27_Jaw_Left = jawLeft
- A28_Jaw_Right = jawRight
- A29_Mouth_Funnel = mouthFunnel
- A30_Mouth_Pucker = mouthPucker
- A31_Mouth_Left = mouthLeft
- A32_Mouth_Right = mouthRight
- A33_Mouth_Roll_Upper = mouthRollUpper
- A34_Mouth_Roll_Lower = mouthRollLower
- A35_Mouth_Shrug_Upper = mouthShrugUpper
- A36_Mouth_Shrug_Lower = mouthShrugLower
- A37_Mouth_Close = mouthClose
- A38_Mouth_Smile_Left = mouthSmile_L
- A39_Mouth_Smile_Right = mouthSmile_R
- A40_Mouth_Frown_Left = mouthFrown_L
- A41_Mouth_Frown_Right = mouthFrown_R
- A42_Mouth_Dimple_Left = mouthDimple_L
- A43_Mouth_Dimple_Right = mouthDimple_R
- A44_Mouth_Upper_Up_Left = mouthUpperUp_L
- A45_Mouth_Upper_Up_Right = mouthUpperUp_R
- A46_Mouth_Lower_Down_Left = mouthLowerDown_L
- A47_Mouth_Lower_Down_Right = mouthLowerDown_R
- A48_Mouth_Press_Left = mouthPress_L
- A49_Mouth_Press_Right = mouthPress_R
- A50_Mouth_Stretch_Left = mouthStretch_L
- A51_Mouth_Stretch_Right = mouthStretch_R
- A52_Tongue_Out = 0
The documentation may refer to different coordinate systems where virtual 3D objects are defined. This appendix defines the different coordinate spaces that can be interfaced with through the SDK.
D.1. NvAR World 3D Space
Here is the face blendshape expression list that is used in the Face 3D Mesh feature and the Facial Expression Estimation feature:
NvAR World 3D space, or simply world space defines the main reference frame used in 3D applications. The reference frame is right handed, and the coordinate units are centimeters. The camera is usually, but not always, placed so that it is looking down the negative z-axis, with the x-axis pointing right, and the y-axis pointing up. The face model is usually, but not always placed so that the positive z-axis points out from the nose of the model, the x-axis points out from the left ear, and the y-axis points up from the head. This is so that no rotation of a face model or a camera model would correspond to the model being in view.
Figure 1. NvAR World 3D Space
D.2. NvAR Model 3D Space
In the NvAR Model 3D Space, or simply the model space, a face model has its origin in the center of the skull where the first neck joint would be placed. The reference frame is right handed, and the coordinate units are centimeters. The positive z-axis points out from the nose of the model, the x-axis points out from the left ear, and the y-axis points up from the head.
Figure 2. NvAR Model 3D Space
D.3. NvAR Camera 3D Space
In NvAR Camera 3D Space or simply the camera space, objects are placed in relation to a specific camera. The camera space can in many cases be the same as the world space unless explicit camera extrinsics are used. The reference frame is right handed, and the coordinate units are centimeters. The positive x-axis points to the right, the y-axis points up and the z-axis points back.
Figure 3. NvAR Camera 3D Space
D.4. NvAR Image 2D Space
The NvAR Image 2D Space, or screen space is the main 2D space for screen coordinates. The origin of an image is the location of the uppermost, leftmost pixel; the x-axis points to the right and the y-axis points down. The unit of this coordinate system is pixels.
Figure 4. NvAR Image 2D Space
There are two different flavors of this coordinate system, either on-pixel or inter-pixel.
In the on-pixel system, the origin point is located on the center of the pixel. In the inter-pixel system, the origin is offset from the center of the pixel by a distance of -0.5 pixels along the x-axis and the y-axis. The on-pixel should be used for integer based coordinates, while the inter-pixel should be used for real valued coordinates (usually defined as floating point coordinates).
|
|
|---|---|
| On-pixel integer coordinates | Inter-pixel real-valued coordinates |
Notice
This document is provided for information purposes only and shall not be regarded as a warranty of a certain functionality, condition, or quality of a product. NVIDIA Corporation (“NVIDIA”) makes no representations or warranties, expressed or implied, as to the accuracy or completeness of the information contained in this document and assumes no responsibility for any errors contained herein. NVIDIA shall have no liability for the consequences or use of such information or for any infringement of patents or other rights of third parties that may result from its use. This document is not a commitment to develop, release, or deliver any Material (defined below), code, or functionality.
NVIDIA reserves the right to make corrections, modifications, enhancements, improvements, and any other changes to this document, at any time without notice.
Customer should obtain the latest relevant information before placing orders and should verify that such information is current and complete.
NVIDIA products are sold subject to the NVIDIA standard terms and conditions of sale supplied at the time of order acknowledgement, unless otherwise agreed in an individual sales agreement signed by authorized representatives of NVIDIA and customer (“Terms of Sale”). NVIDIA hereby expressly objects to applying any customer general terms and conditions with regards to the purchase of the NVIDIA product referenced in this document. No contractual obligations are formed either directly or indirectly by this document.
NVIDIA products are not designed, authorized, or warranted to be suitable for use in medical, military, aircraft, space, or life support equipment, nor in applications where failure or malfunction of the NVIDIA product can reasonably be expected to result in personal injury, death, or property or environmental damage. NVIDIA accepts no liability for inclusion and/or use of NVIDIA products in such equipment or applications and therefore such inclusion and/or use is at customer’s own risk.
NVIDIA makes no representation or warranty that products based on this document will be suitable for any specified use. Testing of all parameters of each product is not necessarily performed by NVIDIA. It is customer’s sole responsibility to evaluate and determine the applicability of any information contained in this document, ensure the product is suitable and fit for the application planned by customer, and perform the necessary testing for the application in order to avoid a default of the application or the product. Weaknesses in customer’s product designs may affect the quality and reliability of the NVIDIA product and may result in additional or different conditions and/or requirements beyond those contained in this document. NVIDIA accepts no liability related to any default, damage, costs, or problem which may be based on or attributable to: (i) the use of the NVIDIA product in any manner that is contrary to this document or (ii) customer product designs.
No license, either expressed or implied, is granted under any NVIDIA patent right, copyright, or other NVIDIA intellectual property right under this document. Information published by NVIDIA regarding third-party products or services does not constitute a license from NVIDIA to use such products or services or a warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual property rights of the third party, or a license from NVIDIA under the patents or other intellectual property rights of NVIDIA.
Reproduction of information in this document is permissible only if approved in advance by NVIDIA in writing, reproduced without alteration and in full compliance with all applicable export laws and regulations, and accompanied by all associated conditions, limitations, and notices.
THIS DOCUMENT AND ALL NVIDIA DESIGN SPECIFICATIONS, REFERENCE BOARDS, FILES, DRAWINGS, DIAGNOSTICS, LISTS, AND OTHER DOCUMENTS (TOGETHER AND SEPARATELY, “MATERIALS”) ARE BEING PROVIDED “AS IS.” NVIDIA MAKES NO WARRANTIES, EXPRESSED, IMPLIED, STATUTORY, OR OTHERWISE WITH RESPECT TO THE MATERIALS, AND EXPRESSLY DISCLAIMS ALL IMPLIED WARRANTIES OF NONINFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE. TO THE EXTENT NOT PROHIBITED BY LAW, IN NO EVENT WILL NVIDIA BE LIABLE FOR ANY DAMAGES, INCLUDING WITHOUT LIMITATION ANY DIRECT, INDIRECT, SPECIAL, INCIDENTAL, PUNITIVE, OR CONSEQUENTIAL DAMAGES, HOWEVER CAUSED AND REGARDLESS OF THE THEORY OF LIABILITY, ARISING OUT OF ANY USE OF THIS DOCUMENT, EVEN IF NVIDIA HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Notwithstanding any damages that customer might incur for any reason whatsoever, NVIDIA’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms of Sale for the product.
VESA DisplayPort
DisplayPort and DisplayPort Compliance Logo, DisplayPort Compliance Logo for Dual-mode Sources, and DisplayPort Compliance Logo for Active Cables are trademarks owned by the Video Electronics Standards Association in the United States and other countries.
HDMI
HDMI, the HDMI logo, and High-Definition Multimedia Interface are trademarks or registered trademarks of HDMI Licensing LLC.
OpenCL
OpenCL is a trademark of Apple Inc. used under license to the Khronos Group Inc.
Trademarks
NVIDIA, the NVIDIA logo, and cuBLAS, CUDA, CUDA Toolkit, cuDNN, DALI, DIGITS, DGX, DGX-1, DGX-2, DGX Station, DLProf, GPU, JetPack, Jetson, Kepler, Maxwell, NCCL, Nsight Compute, Nsight Systems, NVCaffe, NVIDIA Ampere GPU architecture, NVIDIA Deep Learning SDK, NVIDIA Developer Program, NVIDIA GPU Cloud, NVLink, NVSHMEM, PerfWorks, Pascal, SDK Manager, T4, Tegra, TensorRT, TensorRT Inference Server, Tesla, TF-TRT, Triton Inference Server, Turing, and Volta are trademarks and/or registered trademarks of NVIDIA Corporation in the United States and other countries. Other company and product names may be trademarks of the respective companies with which they are associated.