Architecture#
System architecture for SIL testing environment.
System Diagram#
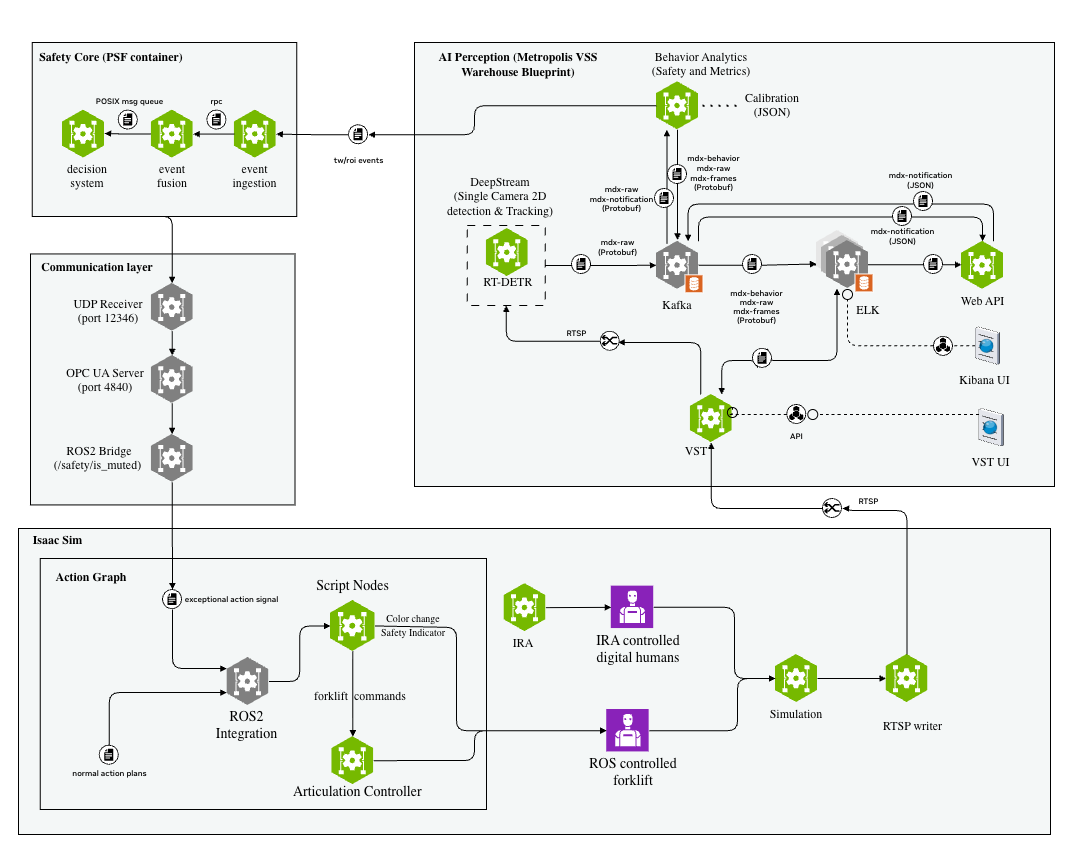
SIL Warehouse Architecture#
Components#
1. Isaac Sim#
Isaac Sim provides the simulation environment for SIL testing: 20×20m warehouse with loading dock, trailer, racking, and pallet storage. Materials and lighting match real-world conditions for camera feeds.
Forklift: Swivel-wheel kinematics — back_wheel_drive (velocity),
back_wheel_swivel (steering). Safety indicator mesh at
/World/forklift_b/body/body/safety_indicator changes color by safety state.
Physics handles steering, friction, weight distribution, and collision detection.
Digital humans: IRA (Isaac Replicator Agent) for autonomous navigation.
Path planning, obstacle avoidance, and animation blending. Agent count and
behavior configurable in default_config_ros.yaml.
Cameras: 3 cameras (overhead, side, loading dock). 1920×1080 RGB,
RTSP to MediaMTX (port 8553). With --enable-vst, cameras auto-register via
cameras.yaml.
2D mode: 30 FPS CFR (constant frame rate, frame duplication)
3D mode: ~12-14 FPS VFR (variable frame rate, unique timestamps required for Sparse4D fusion)
ROS2: Action Graph subscribes to /safety/is_muted from Communication
Layer; publishes to /clock for ROS2 time synchronization. Uses jazzy, rmw_cyclonedds_cpp, domain ID 0.
2. VSS Warehouse Blueprint#
Perception pipeline consuming camera streams and generating safety events.
2D profile: DeepStream with RT-DETR model for object detection and NvDCF for
per-camera tracking. Publishes events to Kafka mdx-events topic.
3D profile: DeepStream with Sparse4D model for 3D multi-view BEV detection
and MTMC (Multi-Target Multi-Camera) tracking. Publishes to Kafka mdx-bev
topic. See 3D Vision AI Profile
and Sparse4D documentation
for details.
The pipeline monitors ROI and Tripwire zones, publishing events to Kafka.
Event format:
{
"event": {
"type": "EXIT",
"id": "roi-id-1",
"info": {
"class": "roi"
}
},
"object": {
"type": "Forklift",
"id": "125",
"confidence": 0.826,
"speed": 15.409
},
"sensor": {
"id": "Camera_01"
},
"timestamp": "2026-01-26T20:27:20.366Z"
}
Event types:
Event type |
Class |
Meaning |
|---|---|---|
|
roi |
Object enters ROI |
|
roi |
Object exits ROI |
|
tripwire |
Object crosses tripwire (entering) |
|
tripwire |
Object crosses tripwire (exiting) |
3. Safety Core (PSF)#
Safety event processing:
Safety Event Integrator (SEI):
Consumes Kafka events (
mdx-eventstopic for 2D,mdx-bevfor 3D)Multi-camera fusion with
timeWindowSize=900ms(tuned for SIL)Event validation
Forwards validated events to Decision Maker
Safety Decision Maker (SDM):
ATL (Automated Trailer Loading) decision logic
Tracks forklift and human presence in ROI
Generates commands: MUTE (0x02) or UNMUTE (0x07)
Sends UDP packets (64 bytes) to Communication Layer on port 12346
4. Communication Layer#
Protocol bridge between Safety Core and Isaac Sim:
UDP Receiver (port 12346): Receives Safety Core commands
OPC UA Server (port 4840): Industrial protocol interface
ROS2 Bridge: Publishes to
/safety/is_muted(Bool)
ROS2 configuration:
ROS_DISTRO: jazzyRMW_IMPLEMENTATION: rmw_cyclonedds_cppROS_DOMAIN_ID: 0
Logs commands to: ${MDX_DATA_DIR}/comm-layer/opc_server.log
Data Flow#
2D mode:
Isaac Sim Cameras (3 cams, 30 FPS CFR)
↓ RTSP streams
AI Perception (VSS Warehouse Blueprint)
├─ RT-DETR detection
├─ NvDCF tracking
└─ ROI/Tripwire analytics
↓ Kafka events (mdx-events topic)
Safety Core (PSF)
├─ SEI: Multi-camera fusion + event validation
└─ SDM: ATL decision logic (MUTE/UNMUTE)
↓ UDP packet (64 bytes, port 12346)
Communication Layer
├─ OPC UA update
└─ ROS2 publish (/safety/is_muted)
↓ ROS2 topic
Isaac Sim Action Graph
└─ Update safety indicator (GREEN/ORANGE)
3D mode:
Isaac Sim Cameras (3 cams, ~12-14 FPS VFR)
↓ RTSP streams (unique timestamps)
AI Perception (VSS Warehouse Blueprint)
├─ Sparse4D 3D multi-view BEV detection + tracking
└─ BEV ROI/Tripwire analytics
↓ Kafka events (mdx-bev topic)
Safety Core (PSF)
├─ SEI: Event validation + passthrough (fusion done at perception)
└─ SDM: ATL decision logic (MUTE/UNMUTE)
↓ UDP packet (64 bytes, port 12346)
Communication Layer
├─ OPC UA update
└─ ROS2 publish (/safety/is_muted)
↓ ROS2 topic
Isaac Sim Action Graph
└─ Update safety indicator (GREEN/ORANGE)
Differences from Production#
SIL runs on x86 with Docker Compose. Key differences from production (IGX Thor):
Component |
SIL (x86) |
Production (IGX Thor) |
|---|---|---|
Platform |
x86 workstation |
IGX Thor (ARM) |
Cameras |
Isaac Sim (simulated) |
Real IP cameras |
Environment |
Virtual warehouse |
Physical facility |
Decision Maker OS |
Linux (Docker) |
FreeRTOS (FSI) |
Event Integrator |
Docker on Linux |
Docker on CCPLEX |
Communication Layer |
Simple UDP + OPC UA (non-safe) |
ESL/FSoE/Profisafe (safety-certified) |
Deployment |
Docker Compose |
Flash binary + Docker Compose |
Shared between SIL and production: AI Perception (VSS Warehouse Blueprint) pipeline, Safety Core fusion algorithms, ATL decision logic, and event formats — ensuring SIL validation reflects production behavior.
Next Steps#
Isaac Sim Configuration - Isaac Sim configuration details
Forklift ROS2 Action Graph - Forklift ROS2 Action Graph
Quick Start Guide - Deploy SIL system (2D)
Quick Start Guide — 3D Perception - Deploy SIL system (3D)