Runs the ORB algorithm over the input image to detect features and extract descriptors. More...
Data Structures | |
| struct | VPIORBParams |
| Structure that defines the parameters for vpiSubmitORBFeatureDetector. More... | |
Macros | |
| #define | VPI_DISABLE_RBRIEF (0x01) |
| Use non-rotationally-invariant BRIEF in ORB. | |
Functions | |
| VPIStatus | vpiInitORBParams (VPIORBParams *params) |
| Initializes VPIORBParams with default values. More... | |
| VPIStatus | vpiCreateORBFeatureDetector (uint64_t backends, int32_t capacity, VPIPayload *payload) |
| Creates an ORB feature detector payload. More... | |
| VPIStatus | vpiSubmitORBFeatureDetector (VPIStream stream, uint64_t backend, VPIPayload payload, VPIPyramid input, VPIArray outCorners, VPIArray outDescriptors, const VPIORBParams *params, VPIBorderExtension border) |
| Submits an ORB feature detector operation to the stream. More... | |
| VPIStatus | vpiCreateORBDescriptorExtractor (uint64_t backends, VPIPayload *payload) |
| Creates an ORB descriptor extractor payload. More... | |
| VPIStatus | vpiSubmitORBDescriptorExtractor (VPIStream stream, uint64_t backend, VPIPayload payload, VPIPyramid input, VPIArray inCorners, VPIArray outDescriptors, uint32_t flags) |
| Submits an ORB descriptor extractor operation to the stream. More... | |
Detailed Description
Runs the ORB algorithm over the input image to detect features and extract descriptors.
Refer to ORB feature detector for more details and usage examples.
Data Structure Documentation
◆ VPIORBParams
| struct VPIORBParams |
Structure that defines the parameters for vpiSubmitORBFeatureDetector.
 Collaboration diagram for VPIORBParams:
Collaboration diagram for VPIORBParams: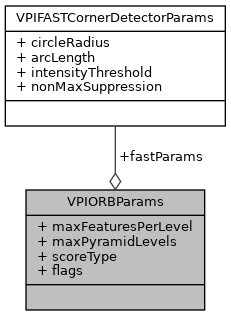
| Data Fields | ||
|---|---|---|
| VPIFASTCornerDetectorParams | fastParams |
Parameters for the FAST corner detector, see FAST Corners Detector for more details. The FAST algorithm is used by ORB to detect corners or features per level of the input pyramid. |
| int32_t | maxFeaturesPerLevel |
The maximum number N of features per level of the input pyramid to be used by ORB. The FAST algorithm may find a large number C of corners per level prior to filtering the N top corners. The number C is the capacity input argument for the create ORB payload function: vpiCreateORBFeatureDetector. The maximum number of features for all levels is defined by the capacity of the output arrays passed as arguments to the submit ORB function: vpiSubmitORBFeatureDetector. The filtering is done depending on the VPIORBParams::scoreType parameter.
|
| int32_t | maxPyramidLevels | Maximum number of levels in the input pyramid to utilize. |
| VPICornerScore | scoreType |
The score type allows to define how scores are assigned to corners. The cornerness score is used to sort all corners detected by FAST from highest to lowest score value. After score assignment, ORB filters the top N corners, where N is determined by the parameter: VPIORBParams::maxFeaturesPerLevel. Use VPI_CORNER_SCORE_HARRIS to assign cornerness scores based on Harris response score. Use VPI_CORNER_SCORE_FAST to skip cornerness score assignment and sorting. By using FAST score type the performance of ORB is improved but the quality of output features is reduced. |
| uint32_t | flags |
Control flags.
|
Function Documentation
◆ vpiInitORBParams()
| VPIStatus vpiInitORBParams | ( | VPIORBParams * | params | ) |
#include <vpi/algo/ORB.h>
Initializes VPIORBParams with default values.
Default values are:
- params.fastParams See vpiInitFASTCornerDetectorParams
- params.maxFeaturesPerLevel: 100
- params.maxPyramidLevels: 4
- params.scoreType: VPI_CORNER_SCORE_HARRIS;
- params.flags: 0
- See also
- Algorithm Details
- Return values
-
VPI_ERROR_INVALID_ARGUMENT paramsis NULL.VPI_SUCCESS Operation executed successfully.
◆ vpiCreateORBFeatureDetector()
| VPIStatus vpiCreateORBFeatureDetector | ( | uint64_t | backends, |
| int32_t | capacity, | ||
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/ORB.h>
Creates an ORB feature detector payload.
This function allocates all temporary memory needed by the algorithm.
- See also
- Algorithm Details
- Parameters
-
[in] backends VPI backends that are eligible to execute the algorithm. - Valid values:
- Backend must be enabled in current context.
[in] capacity Capacity of internal buffers used to store FAST corners and scores per input pyramid level. It determines the maximum number of features per level detected by FAST prior to ORB filtering. The ORB algorithm assigns scores to these features, cf. VPIORBParams::scoreType, and sort them to filter the top N best features in accordance to these scores, where N is the VPIORBParams::maxFeaturesPerLevel parameter. [out] payload Pointer to the payload variable that receives the created handle.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT payloadis NULL.VPI_ERROR_INVALID_ARGUMENT backendsrefers to an invalid backend.VPI_ERROR_INVALID_OPERATION Backend hardware not available. VPI_ERROR_NOT_IMPLEMENTED ORB algorithm is not supported by given backend. VPI_ERROR_INVALID_CONTEXT Current context is destroyed. VPI_ERROR_OUT_OF_MEMORY Cannot allocate required resources. VPI_ERROR_INVALID_OPERATION Backend isn't enabled in current context. VPI_SUCCESS Operation executed successfully.
◆ vpiSubmitORBFeatureDetector()
| VPIStatus vpiSubmitORBFeatureDetector | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| VPIPyramid | input, | ||
| VPIArray | outCorners, | ||
| VPIArray | outDescriptors, | ||
| const VPIORBParams * | params, | ||
| VPIBorderExtension | border | ||
| ) |
#include <vpi/algo/ORB.h>
Submits an ORB feature detector operation to the stream.
- Note
- This operation detects features and extracts descriptors at the same time. In case only the feature detection is necessary, use this operation passing NULL to the descriptor output array for it to be ignored.
- See also
- Algorithm Details
- Parameters
-
[in] stream The stream where the operation will be queued in. - Must not be NULL.
- Stream must have enabled the backends that will execute the algorithm.
[in] backend Backend that will execute the algorithm. - Valid values:
[in] payload Payload to be submitted along the other parameters. [in] input Input pyramid on which ORB will be executed. - Must not be NULL.
- Pyramid must have enabled the backends that will execute the algorithm.
- The input pyramid must have scale == 0.5.
- The accepted image formats are:
- With VPI_BACKEND_PVA :
- PVA backend only supports unsigned 8-bit inputs
- Minimum image size for smallest pyramid level is 64 x 32
[out] outCorners Array that will receive the detected corners. Array size is updated with the number of corners found. Array capacity defines the maximum number of corners to be found for all levels. The maximum possible number of features in all levels F is defined as the VPIORBParams.maxFeaturesPerLeveltimes the number of levels.- Must not be NULL.
- It must have type VPI_ARRAY_TYPE_PYRAMIDAL_KEYPOINT_F32 (see note).
- It must have the same capacity as outDescriptors if less than F (see above).
- Array must have enabled the backends that will execute the algorithm.
[out] outDescriptors Array that will receive the descriptors for the corners Array size is updated with the number of corners found. Array capacity defines the maximum number of descriptors to be found for all levels. The maximum possible number of features in all levels F is defined as the VPIORBParams.maxFeaturesPerLeveltimes the number of levels.- It may be NULL to do feature detection only.
- It must have type VPI_ARRAY_TYPE_BRIEF_DESCRIPTOR.
- It must have the same capacity as outCorners if less than F (see above).
- Array must have enabled the backends that will execute the algorithm.
[in] params Pointer to a VPIORBParams. It defines the parameters for this algorithm invocation. These parameters can vary in every call and will be copied internally. Thus there is no need to keep the parameters object around. - If NULL, use the defaults given by vpiInitORBParams. With VPI_BACKEND_PVA :
- Only supports radius of 3 for params.fastParams.circleRadius
- Only supports arc length of 9 for params.fastParams.arcLength
- Only supports VPI_CORNER_FAST for params.scoreType
[in] border How to handle pixels outside image boundaries. It affects FAST corner detection per level, rf. FAST Corners Detector. - The accepted border extensions are:
- VPI_BORDER_ZERO
- VPI_BORDER_CLAMP
- VPI_BORDER_REFLECT
- VPI_BORDER_MIRROR
- VPI_BORDER_LIMITED (ignore pixels with circle going outside image boundaries) With VPI_BACKEND_PVA :
- VPI_BORDER_ZERO
- VPI_BORDER_CLAMP
- Note
- For backward compatibility with VPI 3.0, VPI_ARRAY_TYPE_KEYPOINT_F32 is also supported as an array type for the
outCornersparameter. With the VPI 3.0 legacy ORB behavior, keypoint coordinates are scaled to the resolution of the first pyramid level and descriptors are computed within the first image of the pyramid.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT streamis NULL.VPI_ERROR_INVALID_ARGUMENT inputoroutCornersoroutDescriptorsare NULL.VPI_ERROR_INVALID_ARGUMENT backendis invalid or unknown.VPI_ERROR_INVALID_ARGUMENT A parameter in paramsis outside valid range.VPI_ERROR_INVALID_ARRAY_TYPE Invalid outCornersoroutDescriptorsarray type.VPI_ERROR_INVALID_IMAGE_FORMAT Unsupported input format. VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in streamorinput.VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in outCornersoroutDescriptors.VPI_SUCCESS Operation executed successfully.
◆ vpiCreateORBDescriptorExtractor()
| VPIStatus vpiCreateORBDescriptorExtractor | ( | uint64_t | backends, |
| VPIPayload * | payload | ||
| ) |
#include <vpi/algo/ORB.h>
Creates an ORB descriptor extractor payload.
This function allocates all temporary memory needed by the algorithm.
- See also
- Algorithm Details
- Parameters
-
[in] backends VPI backends that are eligible to execute the algorithm. - Valid values:
- Backend must be enabled in current context.
[out] payload Pointer to the payload variable that receives the created handle.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT payloadis NULL.VPI_ERROR_INVALID_ARGUMENT backendsrefers to an invalid backend.VPI_ERROR_INVALID_OPERATION Backend hardware not available. VPI_ERROR_NOT_IMPLEMENTED ORB algorithm is not supported by given backend. VPI_ERROR_INVALID_CONTEXT Current context is destroyed. VPI_ERROR_OUT_OF_MEMORY Cannot allocate required resources. VPI_ERROR_INVALID_OPERATION Backend isn't enabled in current context. VPI_SUCCESS Operation executed successfully.
◆ vpiSubmitORBDescriptorExtractor()
| VPIStatus vpiSubmitORBDescriptorExtractor | ( | VPIStream | stream, |
| uint64_t | backend, | ||
| VPIPayload | payload, | ||
| VPIPyramid | input, | ||
| VPIArray | inCorners, | ||
| VPIArray | outDescriptors, | ||
| uint32_t | flags | ||
| ) |
#include <vpi/algo/ORB.h>
Submits an ORB descriptor extractor operation to the stream.
- Note
- This operation is only useful in a scenario where decoupled ORB feature detection and extraction is necessary. For cases where both detection and extraction is executed at the same time, use vpiSubmitORBFeatureDetector instead.
- See also
- Algorithm Details
- Parameters
-
[in] stream The stream where the operation will be queued in. - Must not be NULL.
- Stream must have enabled the backends that will execute the algorithm.
[in] backend Backend that will execute the algorithm. - Must be the backend specified during payload creation or 0 as a shorthand to use this backend.
[in] payload Payload created with vpiCreateORBDescriptorExtractor. - Must not be NULL.
[in] input Input Input on which ORB descriptor extractor will be executed. - Must not be NULL.
- Input must have enabled the backends that will execute the algorithm.
- Input must be a VPIPyramid (see note).
- The input pyramid must have scale == 0.5.
- The accepted image formats are:
- With VPI_BACKEND_PVA :
- Signed image formats are not supported.
- The resolution of every pyramid level must be greater than 45x45
[in] inCorners Array with corners to compute descriptors from. Each item in this array, i.e. a corner, is used to compute one item in the output array, i.e. a descriptor for the corresponding corner. - With VPI_BACKEND_PVA :
- VPIPyramidalKeypointF32::layer is ignored and the descriptors are computed as if layer == 0 always. The size of this input array determines the number of corners to extract descriptors from.
- Must not be NULL.
- It must have type VPI_ARRAY_TYPE_PYRAMIDAL_KEYPOINT_F32 (see note).
- Array must have enabled the backends that will execute the algorithm.
- With PVA, the array size must be either 0 or, if input is a 16-bit image, array size >= 16, else >= 32. This is checked at only at algorithm execution time, not necessarily when this function is invoked.
[out] outDescriptors Array that will receive the descriptors for the corners. Each position in this output array corresponds to the corner descriptor for the same position in the input array. The output array capacity defines the maximum number of descriptors to be extracted. The output array capacity must be bigger than the size of the input array to extract descriptors for all corners. - With VPI_BACKEND_PVA :
- Descriptors generated by PVA are not typically compatible with descriptors generated by other backends.
- Must not be NULL.
- It must have type VPI_ARRAY_TYPE_BRIEF_DESCRIPTOR .
- Array must have enabled the backends that will execute the algorithm.
[in] flags Control flags. - Valid values are a combination of one or more of the following flags:
- 0: default, negation of all other flags.
- VPI_DISABLE_RBRIEF : Disable rotationally-invariant BRIEF
- Note
- For backward compatibility with VPI 3.0 an alternative API signature is available where
inputmust be a VPIImage andinCornersmust have type VPI_ARRAY_TYPE_KEYPOINT_F32 . To select the VPI 3.0 interface, define NV_VPI_VERSION_API as NV_VPI_MAKE_VERSION(3,0) prior to including the ORB.h header file. PVA backend is only supported for API level 3.1 and up, while using VPI library version 3.2 and up.
- Return values
-
VPI_ERROR_INVALID_ARGUMENT Either streamorinputorinCornersoroutDescriptorsis NULL.VPI_ERROR_INVALID_ARGUMENT The backendis invalid or unknown.VPI_ERROR_INVALID_ARRAY_TYPE Invalid inCornersoroutDescriptorsarray type.VPI_ERROR_INVALID_IMAGE_FORMAT Unsupported input format. VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in streamorinput.VPI_ERROR_INVALID_OPERATION The needed backends aren't enabled in inCornersoroutDescriptors.VPI_SUCCESS Operation executed successfully.